Clear Sky Science · it
Attenuazione del rumore di misura nel predittore di Smith modificato e nei controller automatici di offset per sistemi integratore con tempo morto
Perché è importante per la tecnologia di tutti i giorni
Molti dispositivi di cui ci fidiamo — dagli impianti chimici e sistemi di alimentazione alle automobili e ai piccoli banchi di laboratorio — devono reagire a misure di sensori che arrivano in ritardo e sono contaminate dal rumore. Questo articolo pone una domanda semplice ma cruciale: quando i segnali sono ritardati e rumorosi, quale tipo di regolatore automatico mantiene il sistema stabile, preciso e poco aggressivo sui componenti? Gli autori confrontano un metodo popolare basato sulla previsione con un approccio più recente che stima e annulla attivamente i disturbi, rivelando perché uno dei due risulta molto più affidabile nel mondo reale, disordinato.
Reazioni ritardate e misure incerte
In molti processi, modificare un ingresso (come la potenza di un riscaldatore o la posizione di una valvola) non influenza immediatamente l’uscita. Esiste un ritardo intrinseco mentre il calore si diffonde, le sostanze si mescolano o le parti meccaniche si muovono. Gli ingegneri descrivono spesso tali sistemi come un “integratore con tempo morto”: l’uscita accumula l’effetto dell’ingresso, ma solo dopo un intervallo di attesa. Allo stesso tempo, i sensori che misurano temperatura, portata o posizione contengono sempre del rumore casuale. Un regolatore deve quindi governare un sistema la cui risposta è sia ritardata sia osservata attraverso una lente instabile. Se ciò viene fatto male, il segnale di controllo può oscillare violentemente, usurare gli attuatori e comunque non raggiungere il valore desiderato.
Vecchio predittore contro nuovo rimuovi-offset
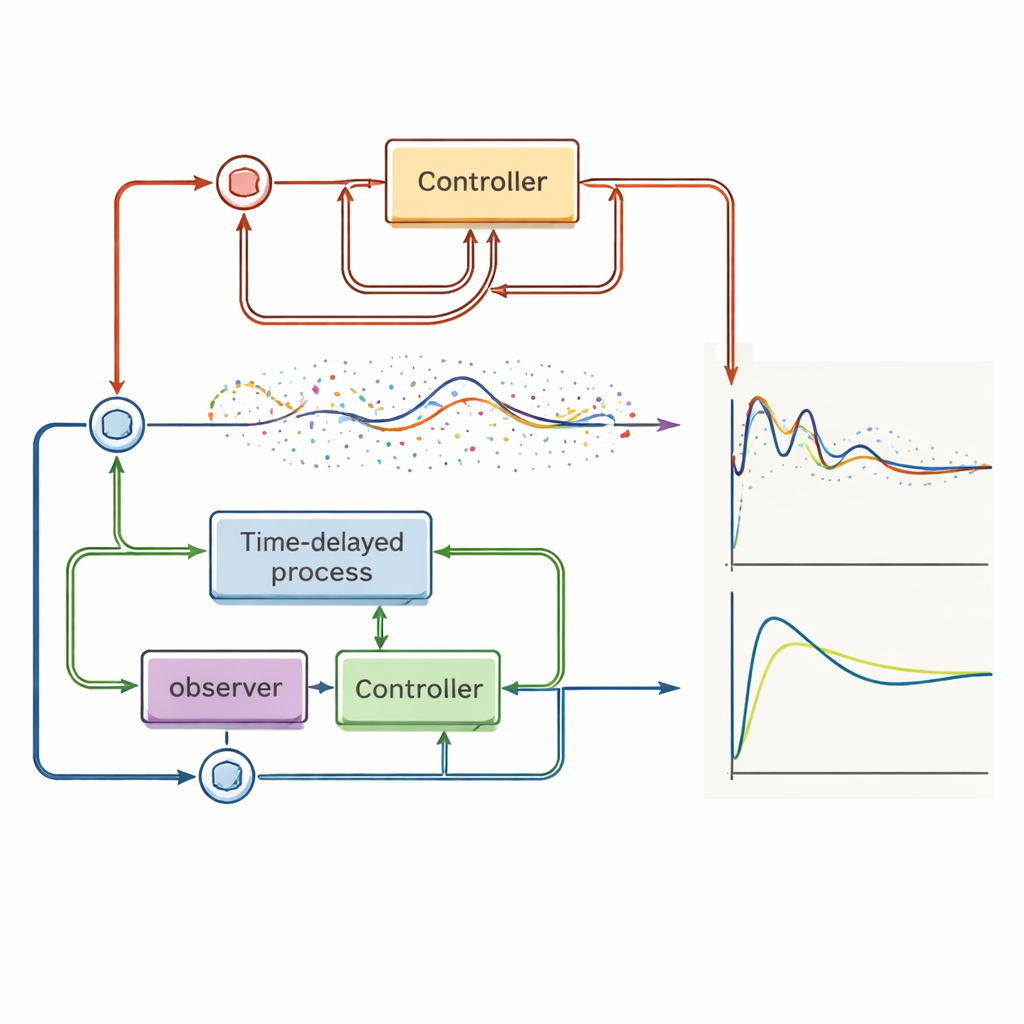
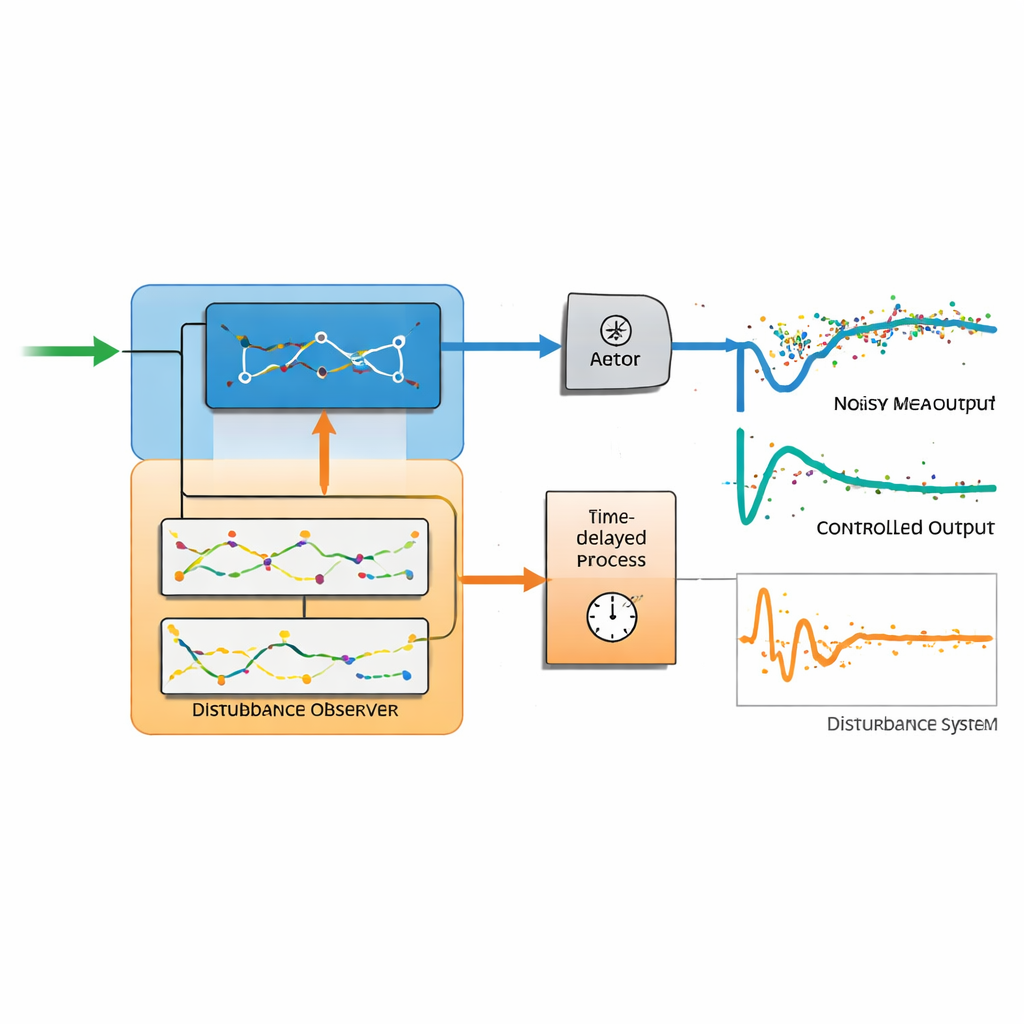
Il classico predittore di Smith e la sua variante moderna, il predittore Åström–Smith, affrontano il ritardo costruendo un modello interno del processo e utilizzandolo per prevedere l’uscita futura. In condizioni ideali, questo può dare risposte veloci e nette. Il progetto concorrente esaminato qui, chiamato controller automatico di offset, prende una strada diversa. Combina un regolatore stabilizzante ordinario con un osservatore di disturbi — un modulo che inferisce i disturbi nascosti che agiscono sull’ingresso e li cancella automaticamente. La chiave è che questo osservatore usa un modello interno completo del sistema con ritardo, insieme a filtri passa-basso progettati con cura e, se necessario, derivate di ordine superiore dell’uscita. Questa struttura permette agli ingegneri di regolare la rapidità con cui i disturbi vengono ricostruiti senza compromettere il modo in cui il sistema segue un setpoint desiderato.
Cosa succede quando il rumore è reale, non ideale
Quando gli autori introducono rumore di misura realistico nelle simulazioni e negli esperimenti, la differenza tra i due approcci diventa netta. Il controllore basato sul predittore, che si appoggia a diversi blocchi integratori marginalmente stabili, diventa estremamente sensibile al rumore. Anche per livelli di rumore dell’ordine di circa un punto percentuale del segnale, lo sforzo di controllo esplode — centinaia o migliaia di volte superiore rispetto al controller automatico di offset — e il segnale dell’attuatore diventa fortemente instabile. Peggio ancora, il predittore non riesce più a garantire che l’uscita raggiunga infine il setpoint: compaiono offset persistenti e persino instabilità, soprattutto quando gli attuatori raggiungono i limiti di saturazione. Per contro, il controller automatico di offset mantiene segnali di controllo scorrevoli, respinge efficacemente disturbi costanti e mantiene l’uscita vicina al valore target, grazie alla sua filtrazione e alla struttura di stima dei disturbi.
Mettere i metodi alla prova pratica
L’articolo non si limita a modelli astratti. Gli autori applicano entrambi i controller a un reattore chimico instabile approssimato da un modello semplice dominato dal ritardo, e a un banco termico di laboratorio reale costruito attorno a una lampada, un sensore di temperatura e una ventola di raffreddamento. Nel caso instabile, il controller automatico di offset funziona ancora in modo affidabile, sebbene la sua taratura debba essere attenuata per evitare sovraelongazioni, mentre il metodo basato sul predittore soffre di errori crescenti con l’intensificarsi del rumore. Nel sistema termico, il controller automatico di offset produce risposte quasi ottimali in tempo che sono fluide sia in temperatura sia nello sforzo di controllo, anche quando la ventola introduce cambiamenti improvvisi. Il controllore basato sul predittore, al contrario, mostra errori stabili visibili e comportamenti sensibilmente più lenti e meno affidabili ogni volta che sono presenti rumore realistico e limiti sugli attuatori.
Cosa significa per i controller futuri
Da una prospettiva divulgativa, la conclusione è chiara: un regolatore che si limita a prevedere il futuro basandosi su un modello ideale può apparire impressionante sulla carta, ma può comportarsi molto male non appena compaiono rumore reale e limiti pratici. Il controller automatico di offset, con il suo osservatore di disturbi integrato e il modello interno filtrato con cura, si dimostra più robusto, più preciso e più facile da sintonizzare su un’ampia gamma di processi con ritardo. Gli autori concludono che, mentre un predittore di Smith modificato può ancora essere utile in situazioni di nicchia a basso rumore, un progetto basato su osservatori di disturbi è una scelta di default più semplice e affidabile per i sistemi di controllo moderni in cui i sensori sono imperfetti e la stabilità è essenziale.
Citazione: Huba, M., Bistak, P. & Vrancic, D. Measurement noise attenuation in modified Smith predictor and automatic offset controllers for integrator plus dead-time system. Sci Rep 16, 8335 (2026). https://doi.org/10.1038/s41598-026-39732-9
Parole chiave: controllo con ritardo temporale, osservatore di disturbi, rumore di misura, controller automatico di offset, predittore di Smith