Clear Sky Science · it
Programmazione efficiente della ricarica tramite il coordinamento di plotoni di veicoli elettrici e stazioni di ricarica
Perché una ricarica più intelligente è importante per gli automobilisti di tutti i giorni
Con la crescente diffusione dei veicoli elettrici, ricaricare in modo rapido e conveniente sarà importante quanto trovare una stazione di servizio oggi. Questo studio analizza cosa succede quando non solo singole auto elettriche, ma anche gruppi compatti di esse, noti come plotoni, condividono gli stessi caricatori a bordo strada. Coordinando come si muovono questi veicoli e dove si fermano a ricaricare, gli autori mostrano che è possibile ridurre i tempi persi, evitare code lunghe alle stazioni affollate e sfruttare meglio l’hardware di ricarica esistente.
Traffico misto sulle strade di domani
Il lavoro immagina autostrade del prossimo futuro dove due tipi di traffico elettrico viaggiano fianco a fianco. Uno è costituito da auto tradizionali guidate da persone i cui proprietari decidono quando e dove ricaricare. L’altro è formato da convogli organizzati di veicoli automatizzati—furgoni per consegne, robotaxi o flotte aziendali—that viaggiano insieme a velocità coordinate. Questi plotoni risparmiano energia e aumentano la capacità della strada, ma quando entrano in una stazione possono occupare più punti di ricarica contemporaneamente, sovraccaricando rapidamente la capacità locale. I metodi di pianificazione tradizionali trattano ogni veicolo come un cliente separato e indipendente e raramente considerano questo effetto di aggregazione, che può trasformare una rete fluida in un sistema afflitto da colli di bottiglia.
Un dispatcher digitale per auto e caricabatterie
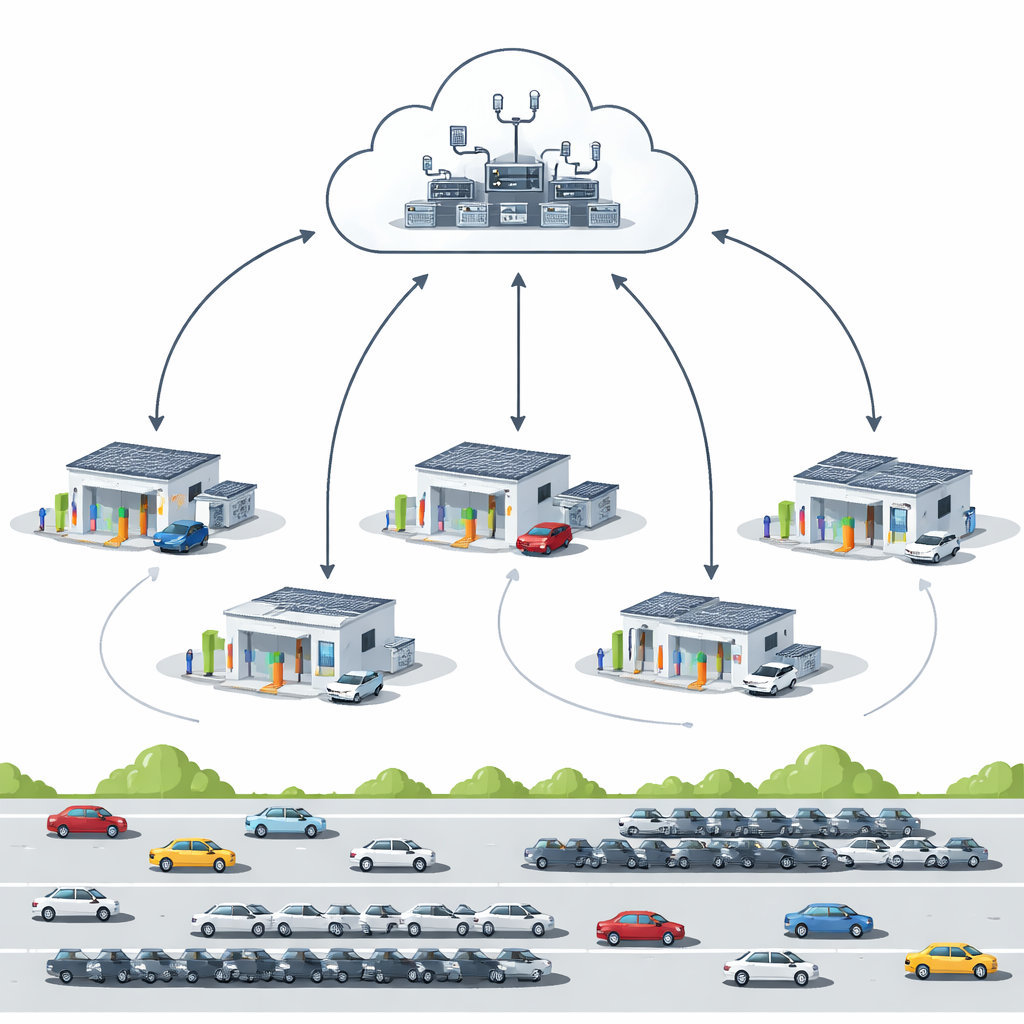
Per risolvere il problema, gli autori propongono un dispatcher intelligente che risiede nella rete e comunica sia con i veicoli sia con le stazioni di ricarica. Utilizzando link veicolo‑infrastruttura simili alle reti cellulari odierne, auto e plotoni condividono periodicamente informazioni semplici come energia residua in batteria, quantità di carica desiderata e posizione attuale. Il dispatcher conosce anche la conformazione stradale, quanto è congestionato ogni segmento e quanta potenza può erogare ogni colonnina. Con questi dati combinati assegna ogni auto o plotone a una stazione specifica e suggerisce velocità di viaggio adeguate, con l’obiettivo di minimizzare il tempo totale trascorso nel percorso verso e nell’uso di un caricatore, evitando al contempo che una singola stazione venga sovraccaricata.
Come funziona la pianificazione intelligente
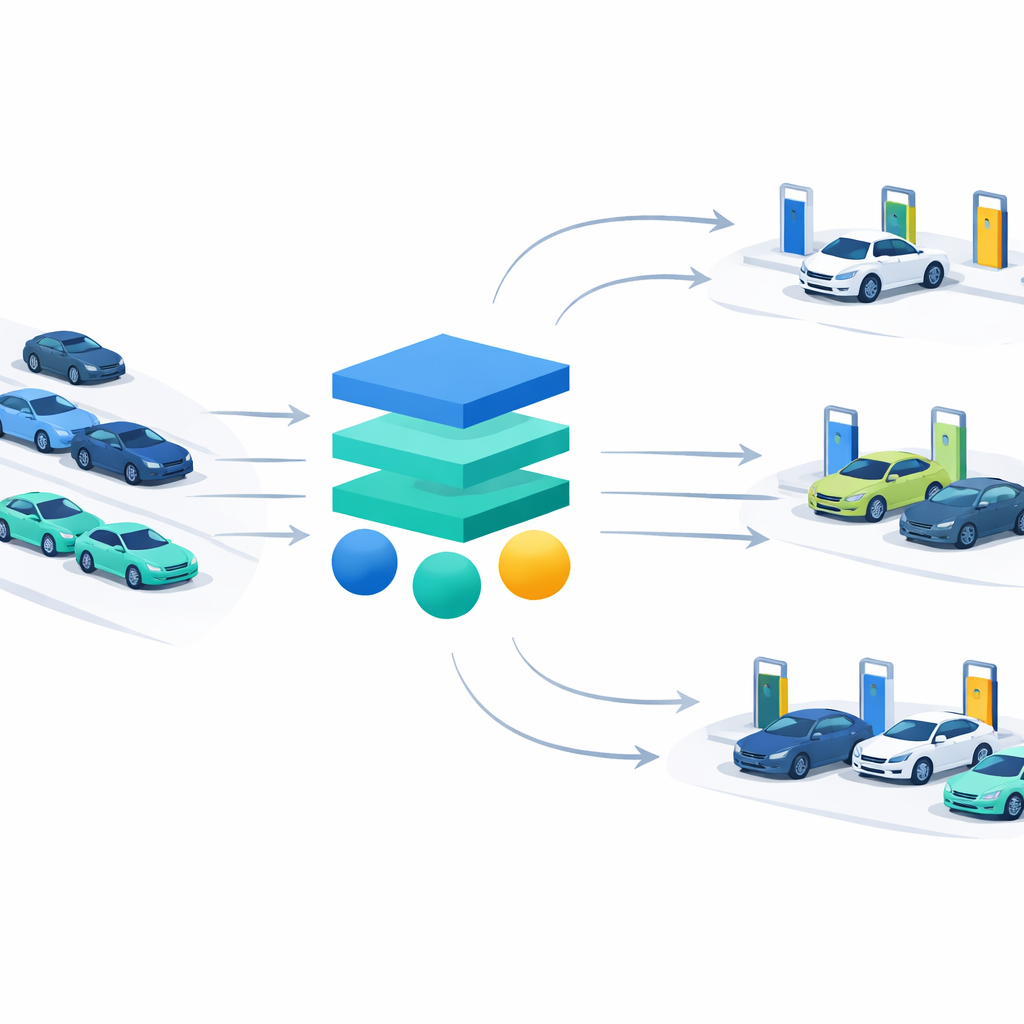
Dietro le quinte il sistema risolve un puzzle complesso: chi dovrebbe andare a quale stazione e con quale velocità ogni veicolo o plotone dovrebbe viaggiare per raggiungere la stazione senza esaurire la batteria. Poiché i plotoni occupano più prese simultaneamente, le loro assegnazioni influenzano fortemente le opzioni di tutti gli altri. Gli autori scompongono questo problema in due fasi alternate. Prima, usando un metodo di ricerca ispirato alla pianificazione a fasi, o una scorciatoia greedy più veloce, il dispatcher sceglie le assegnazioni alle stazioni rispettando la regola che nessuna stazione può superare il numero di prese disponibili e che ogni veicolo deve scegliere esattamente una fermata. Secondo, tenute fisse quelle assegnazioni, una routine di ottimizzazione ispirata agli sciami aggiusta le velocità di veicoli e plotoni su e giù entro i limiti legali in modo che consumo energetico, tempo di viaggio e tempo di ricarica migliorino congiuntamente. Il processo si ripete quindi, raffinando gradualmente entrambe le scelte fino a quando i miglioramenti diventano trascurabili.
Cosa rivelano le simulazioni su una ricarica migliore
Esperimenti al computer esplorano come questa strategia coordinata si comporta in una varietà di condizioni realistiche. Rispetto a regole semplici come «vai sempre alla stazione libera più vicina» o a scelte greedy elementari, il metodo proposto riduce in modo costante il tempo totale trascorso a guidare e ricaricare. I benefici emergono in particolare quando ci sono molti plotoni o quando le stazioni vicine hanno capacità limitata. I risultati evidenziano varie lezioni di progetto: distribuire lo stesso numero totale di prese su più stazioni di solito riduce il tempo complessivo perché più conducenti possono trovare una fermata ragionevolmente vicina; aumentare la potenza di ricarica accorcia prevedibilmente le sessioni ma funziona meglio se combinato con una pianificazione intelligente; e plotoni molto grandi, pur efficienti su strada, possono aumentare drasticamente i ritardi alle stazioni a meno che la loro ricarica non venga attentamente coordinata.
Cosa significa per i viaggi EV del futuro
In termini pratici, lo studio mostra che un coordinamento più intelligente—non solo più hardware—può rendere il viaggio elettrico più veloce e più affidabile. Trattando i convogli di veicoli come soggetti di primo piano nella pianificazione della ricarica e regolando sia dove si fermano sia a che velocità si muovono, il quadro proposto riduce l’affollamento nelle stazioni più frequentate e abbrevia l’esperienza combinata di guida e ricarica. Con la crescita dell’uso degli EV e l’adozione del platooning da parte delle flotte commerciali, una pianificazione congiunta di questo tipo potrebbe aiutare città e gestori autostradali a offrire viaggi più scorrevoli senza aggiungere all’infinito nuovi caricatori, indicando la strada verso un sistema stradale elettrico più efficiente e orientato all’utente.
Citazione: Qi, L., Wu, B., Li, S. et al. Efficient charging scheduling through coordination of electric vehicle platoons and charging stations. Sci Rep 16, 8773 (2026). https://doi.org/10.1038/s41598-026-39376-9
Parole chiave: ricarica di veicoli elettrici, platooning di veicoli, trasporto intelligente, pianificazione delle stazioni di ricarica, ottimizzazione del traffico