Clear Sky Science · it
Controllo diretto predittivo sequenziale della velocità di PMSM
Controllo più intelligente per i motori elettrici di tutti i giorni
I motori elettrici alimentano silenziosamente linee di produzione, pompe, robot e persino alcuni elettrodomestici. Far funzionare questi motori in modo efficiente e fluido permette di risparmiare energia, ridurre rumore e usura e migliorare l’affidabilità. Questo articolo esplora un nuovo modo di controllare un tipo di motore molto diffuso in modo che reagisca rapidamente ai cambiamenti senza diventare instabile o generare eccessivi «disturbi» elettrici. Gli autori si concentrano su una strategia che promette una taratura più semplice per gli ingegneri, pur offrendo un controllo della velocità rapido e preciso.
Perché i controlli dei motori attuali sono difficili da tarare
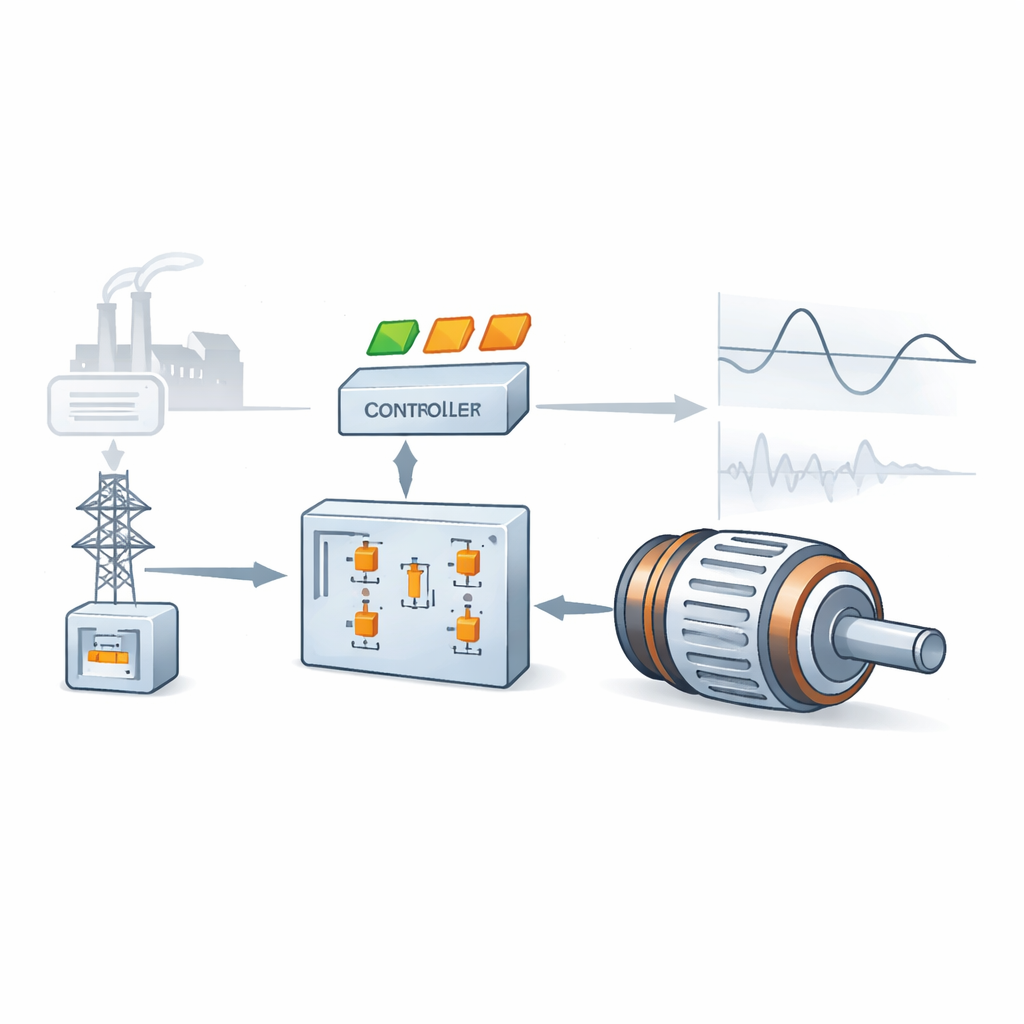
I motori sincroni a magneti permanenti sono ampiamente usati perché sono compatti, efficienti e capaci di controllo preciso della velocità. Gli schemi di controllo tradizionali si basano su diversi anelli nidificati e su una serie di manopole di taratura che gli ingegneri devono regolare per tentativi. Approcci più recenti basati sul controllo predittivo cercano di scegliere la migliore azione per il motore per una frazione di secondo nel futuro, migliorando i tempi di reazione e permettendo di gestire più obiettivi contemporaneamente (come precisione di velocità e bassa corrente). Tuttavia, questi controllori predittivi tipicamente combinano tutti gli obiettivi in un’unica espressione matematica complessa che dipende da diversi “fattori di peso”. Scegliere questi pesi è notoriamente difficile: una buona scelta può dare prestazioni eccellenti, mentre una cattiva può rendere il sistema lento o addirittura instabile.
Un modo passo dopo passo per prendere decisioni
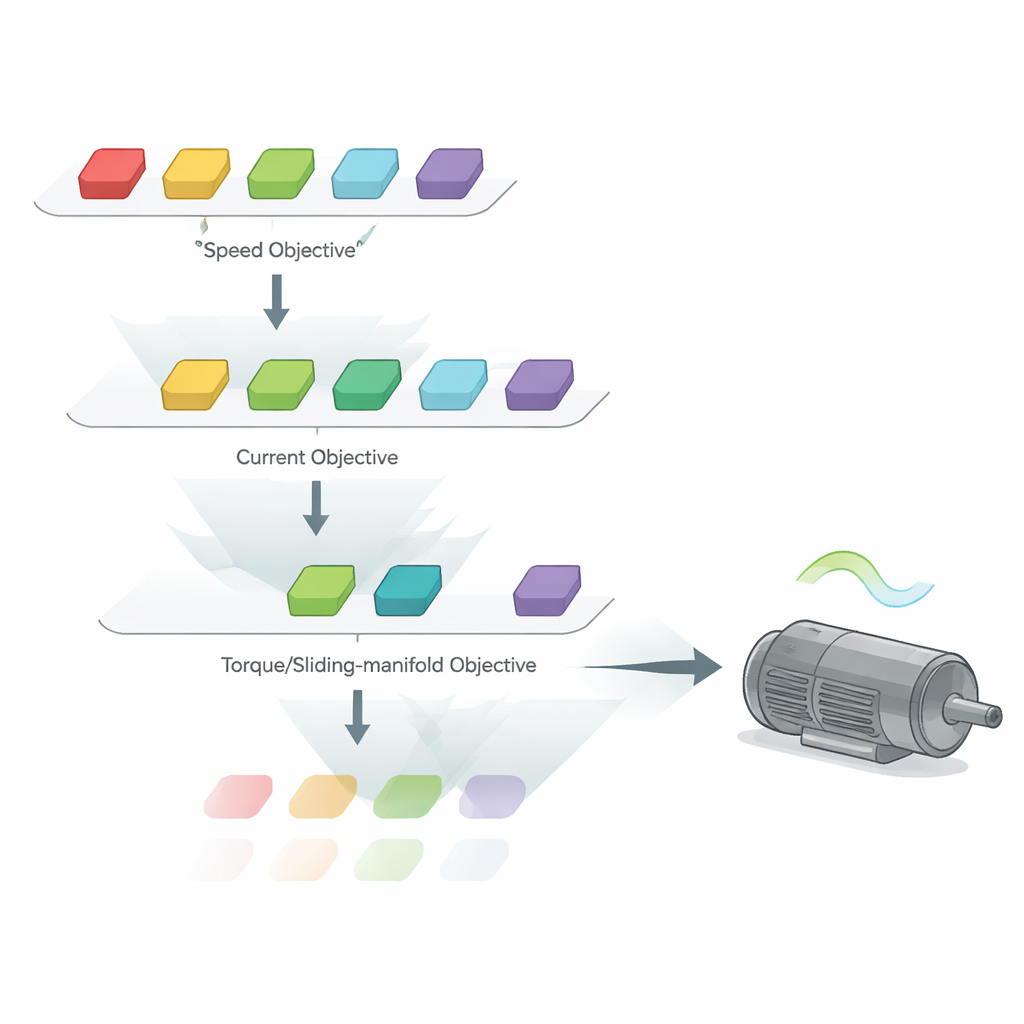
Invece di concentrare tutti gli obiettivi in un’unica formula complicata, gli autori studiano un approccio «sequenziale». Qui, il controllore predice comunque come si comporterà il motore per ogni possibile posizione degli interruttori nell’elettronica di potenza, ma valuta obiettivi separati e più semplici uno dopo l’altro. Prima elimina le opzioni di commutazione che darebbero scarse prestazioni di velocità. Poi, tra le opzioni rimanenti, mantiene solo quelle che fanno un uso efficiente della corrente. Infine seleziona l’opzione che meglio modella la coppia del motore, usando una regola di scorrimento speciale che collega l’errore di velocità e l’errore di coppia in modo che la velocità converga più rapidamente. Poiché ogni passo si concentra su un singolo obiettivo, non è necessario destreggiarsi tra diversi fattori di peso; al loro posto, il controllore usa un processo logico di eliminazione. Un osservatore associato stima la coppia di carico sconosciuta sull’albero in modo che le previsioni restino accurate anche quando il motore subisce disturbi.
Migliorare la stabilità con un progetto potenziato
Quando gli autori hanno testato per la prima volta questo metodo sequenziale, hanno scoperto che, sebbene rispondesse rapidamente ai cambiamenti di velocità, poteva diventare instabile e produrre grandi ondulazioni nella corrente del motore, specialmente quando cercavano di renderlo più reattivo. Per correggere ciò, hanno proposto una versione potenziata che aggiunge un escamotage alla prima fase decisionale: non considera solo la velocità prevista ma penalizza lievemente anche certe componenti di corrente, scalando questa penalità in funzione della velocità richiesta. A basse velocità il controllore si concentra maggiormente nel mantenere le correnti calme; a velocità più alte consente azioni più decise per mantenere le prestazioni. Questa modifica rende possibile usare una regola di scorrimento più aggressiva per la coppia senza innescare instabilità. In simulazioni dettagliate al computer, il metodo potenziato ha eguagliato il tempo di salita di un controllore predittivo convenzionale ben tarato e ha prodotto livelli simili di distorsione elettrica, il tutto con meno parametri da regolare.
Mettere il metodo alla prova in laboratorio
Il gruppo ha poi implementato sia il controllore sequenziale originale sia quello potenziato su un azionamento reale da 1,1 kilowatt usando una piattaforma di rapid‑prototyping. Li hanno confrontati con un controllore predittivo standard in condizioni realistiche, incluse rampe di velocità rapide, applicazione improvvisa di carico e persino inversioni di senso di rotazione. Il controllore sequenziale originale riusciva a regolare la velocità ma mostrava occasionali perdite di stabilità e forti ondulazioni di corrente, in particolare a velocità elevate. Al contrario, la versione potenziata ha funzionato stabilmente nell’intervallo testato. Regolando un unico parametro chiave che modella la regola di scorrimento, i ricercatori hanno potuto scambiare inseguimento più preciso della velocità con forme d’onda di corrente più morbide. Impostazioni intermedie hanno fornito un compromesso pratico: gli errori di velocità sono stati significativamente ridotti rispetto a impostazioni conservative, mentre l’aumento della distorsione di corrente è rimasto accettabile.
Cosa significa per gli azionamenti nel mondo reale
Per i non specialisti, il messaggio principale è che gli autori hanno dimostrato un modo più semplice ma comunque potente per controllare motori elettrici ad alte prestazioni. La loro strategia sequenziale potenziata elimina gran parte del lavoro di tentativi tipico della taratura dei controllori predittivi tradizionali, pur preservando reazioni rapide ai cambiamenti di velocità e ai disturbi. Il metodo non è perfetto: le forme d’onda di corrente risultano ancora un po’ più rumorose dell’ideale, specialmente con impostazioni molto aggressive, ma rappresenta un passo importante verso azionamenti più robusti e facili da mettere in servizio. Lavori futuri si concentreranno sulla riduzione di queste distorsioni di corrente e su ulteriori analisi della stabilità, con l’obiettivo di rendere questo tipo di controllo sequenziale intelligente adatto a sistemi industriali più grandi e con vincoli più stringenti.
Citazione: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Parole chiave: motore sincrono a magneti permanenti, controllo predittivo di modello, controllo della velocità del motore, controllo sequenziale, azionamenti di elettronica di potenza