Clear Sky Science · it
Strategia di ricostruzione dei dati di traiettoria dei veicoli per il riconoscimento video basata su un metodo in due fasi di interpolazione e filtraggio
Perché pulire i dati del traffico digitale è davvero importante
Ogni volta che una telecamera del traffico osserva le auto muoversi in un incrocio, genera un flusso nascosto di dati che descrive dove va ogni veicolo, quanto velocemente si muove e come accelera o frena. Queste informazioni sono preziose per strade più sicure, semafori più intelligenti e future auto a guida autonoma. Ma nella realtà quei dati sono disordinati: i veicoli vengono nascosti dai camion, i fari si riflettono sotto la pioggia e i sistemi di visione artificiale commettono errori. Questo studio affronta una questione molto pratica: come trasformare quei dati video imperfetti in un registro affidabile di come i veicoli si muovono realmente?
Quando le telecamere interpretano male il movimento delle auto
Il tracciamento basato su video è attraente perché è economico, non intrusivo e copre ampie aree. Eppure l’output grezzo è costellato di due problemi principali. Il primo sono gli errori evidenti, come un’auto che sembra saltare indietro, fermarsi istantaneamente da velocità autostradale o mostrare esplosioni di accelerazione impossibili. Questi generalmente derivano da occlusioni, sfocatura di movimento o dal temporaneo smarrimento del veicolo da parte del software di tracciamento. Il secondo problema è il jitter casuale—piccole oscillazioni rapide nella posizione riportata. Quando velocità e accelerazioni vengono calcolate da quelle posizioni, le oscillazioni si amplificano, facendo apparire la guida normale come erratica. Se non corrette, queste anomalie possono alterare i modelli del traffico di oltre il 40 percento, inducendo in errore studi di sicurezza e sistemi di guida automatica.
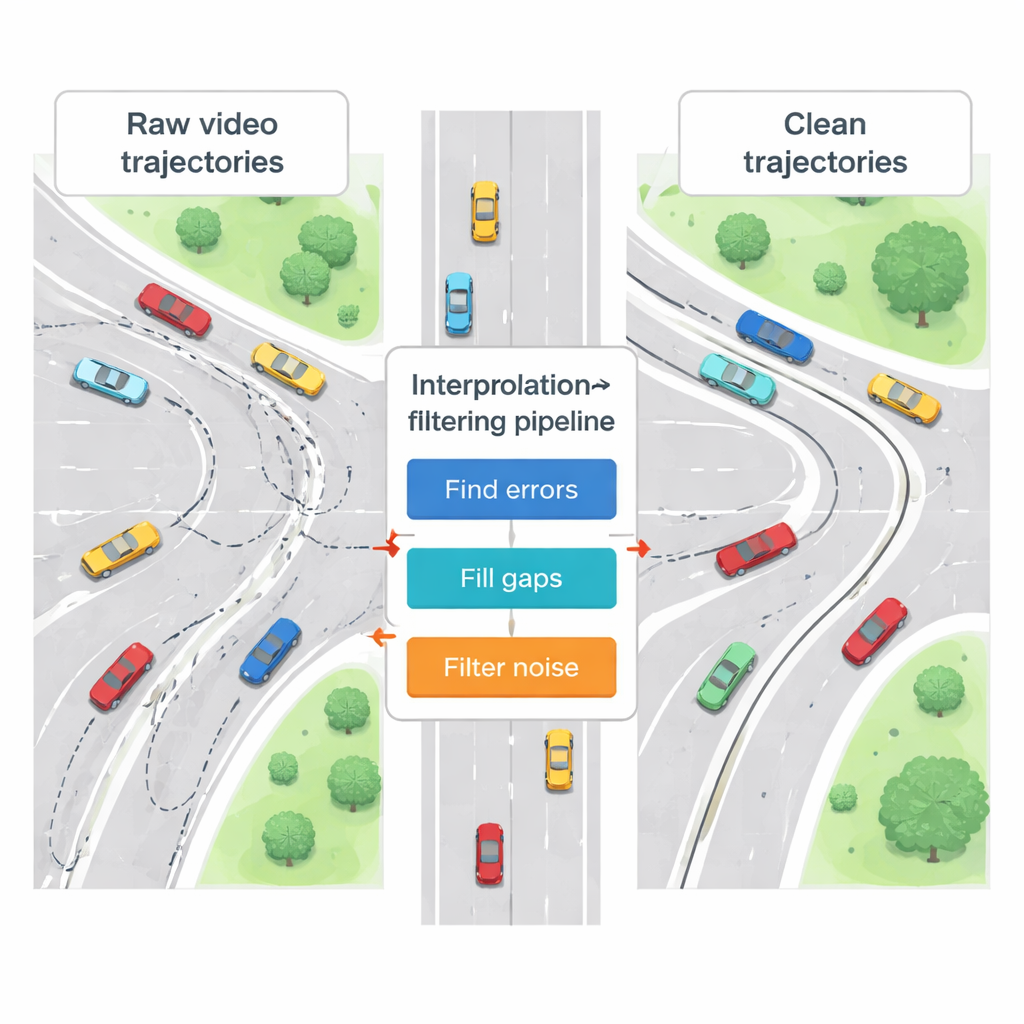
Un piano di pulizia in due fasi
Per riparare questi danni, gli autori propongono una strategia di ricostruzione in due fasi che funziona come un meccanico digitale attento. La prima fase si concentra sugli errori evidenti: scansiona il record di ciascun veicolo alla ricerca di velocità e accelerazioni che violano limiti fisici elementari, come jerk estremamente elevati (variazioni molto repentine dell’accelerazione) o accelerazioni oltre quanto un’auto e un guidatore reali possono sopportare. Una volta individuati questi punti anomali, vengono sostituiti usando strumenti matematici chiamati interpolazione, che stimano i valori mancanti a partire da punti vicini più affidabili. Lo studio confronta diverse varianti di interpolazione e trova che un approccio chiamato interpolazione di Hermite preserva meglio la forma naturale della traiettoria rispetto al metodo più tradizionale di Lagrange, specialmente quando il moto è complesso.
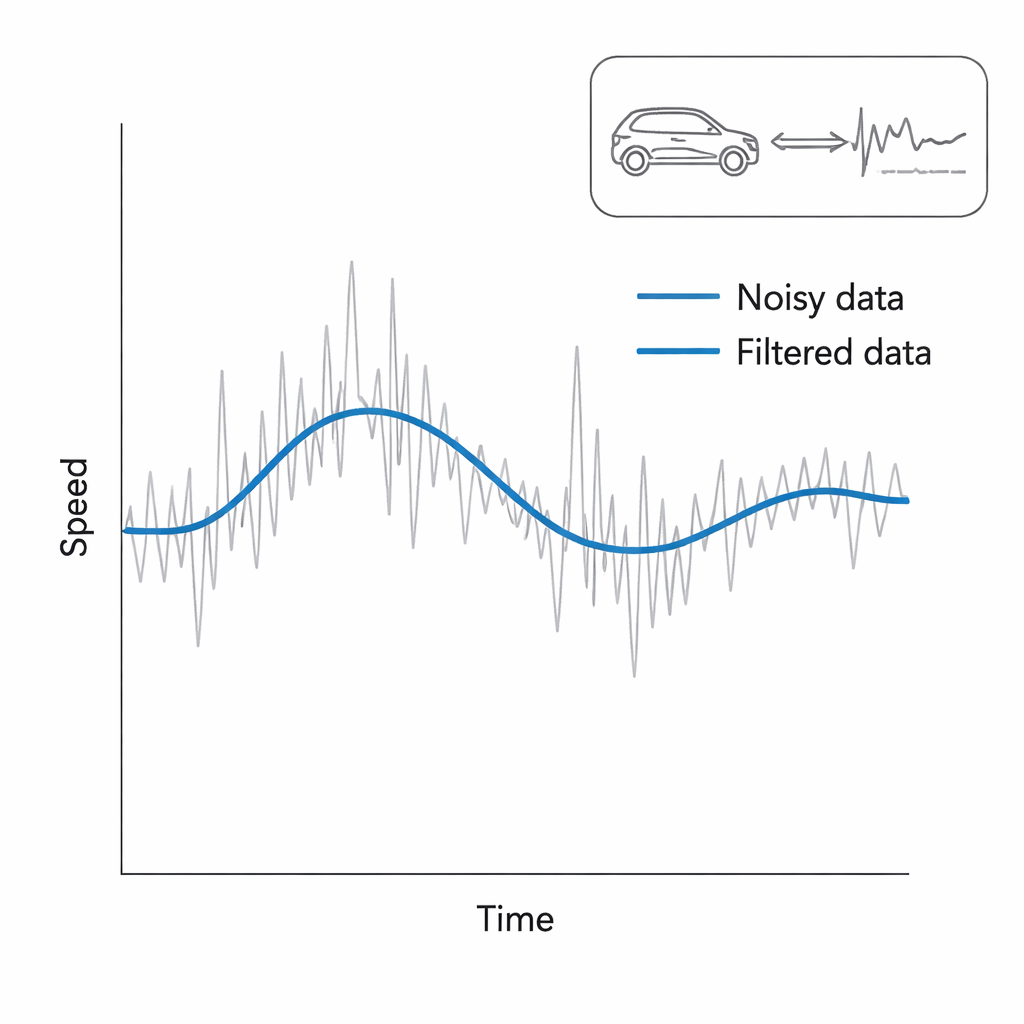
Smussare il percorso digitale
La seconda fase affronta il problema più sottile del rumore residuo. Anche dopo aver corretto gli errori grossolani, le tracce rimanenti possono ancora apparire leggermente instabili. Qui i ricercatori testano due modi di levigare i dati: un metodo raffinato di media mobile che assegna maggior peso ai punti recenti e una tecnica statistica nota come filtro di Kalman, che aggiorna continuamente la sua migliore stima della posizione e della velocità vere del veicolo man mano che arrivano nuove misure. Entrambe le tecniche attenuano il jitter, ma il filtro di Kalman fa un lavoro migliore nel seguire i cambiamenti reali della guida—per esempio, una frenata leggera o un cambio di corsia—senza annullarli. Il risultato è una descrizione più fluida e realistica di come ogni veicolo si sia effettivamente comportato nel tempo.
Mettere alla prova il metodo
Il team applica il proprio framework a video reali catturati in un incrocio urbano trafficato di Zhengzhou, in Cina, usando software moderni di rilevamento e tracciamento degli oggetti per estrarre i percorsi dei veicoli. Successivamente elaborano dozzine di tracce veicolari con il loro processo in due fasi e valutano il successo usando indicatori fisici semplici: quanto oscilla l’accelerazione e quanto spesso il jerk supera un livello considerato irrealistico per le auto passeggeri. Confrontano inoltre le traiettorie video ripulite con dati di riferimento registrati direttamente dagli strumenti di bordo di un’auto. Attraverso molti pattern di guida—cronometro costante, frenate brusche, cambi di corsia—la strategia combinata di interpolazione e filtraggio riduce la variabilità dell’accelerazione di circa l’85 percento e quasi elimina i picchi di jerk implausibili, avvicinandosi ai dati strumentali più di diversi metodi concorrenti.
Cosa significa per gli spostamenti di ogni giorno
In termini pratici, questo articolo mostra come trasformare filmati imperfetti da telecamere del traffico ordinarie in dati di cui ingegneri e veicoli automatizzati possono effettivamente fidarsi. Riparando prima i glitch evidenti e poi smussando con attenzione il rumore, il metodo proposto produce tracce digitali realistiche del movimento delle auto, senza richiedere hardware esotico o enorme potenza di calcolo. Questa immagine più pulita può alimentare una migliore temporizzazione dei semafori, simulazioni del traffico più accurate e algoritmi di guida autonoma più sicuri che dipendono dalla comprensione del comportamento di guida nel mondo reale. Pur concentrandosi su una singola città e non coprendo ancora tutte le condizioni meteorologiche o stradali, lo studio traccia un percorso chiaro e pratico verso l’uso delle reti video esistenti come sensori affidabili per la prossima generazione di sistemi di trasporto intelligenti.
Citazione: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Parole chiave: traiettoria del veicolo, dati video del traffico, denoising dei dati, trasporto intelligente, guida autonoma