Clear Sky Science · it
Controllo neurale adattivo basato su ESO per un quadrotore contro disturbi di vento e carico
Mantenere i droni stabili in un mondo reale caotico
I piccoli droni a quattro rotori sono sempre più impiegati per attività come ispezioni di ponti, monitoraggio delle colture o consegna di piccoli pacchi. Ma nel mondo reale questi robot volanti affrontano raffiche di vento e carichi oscillanti appesi sotto di loro, che possono facilmente deviarli dalla rotta. Questo articolo presenta un nuovo modo per mantenere tali droni in volo fluido lungo le traiettorie pianificate, anche quando l’aria è turbolenta e un carico oscillante li tira fuori asse.
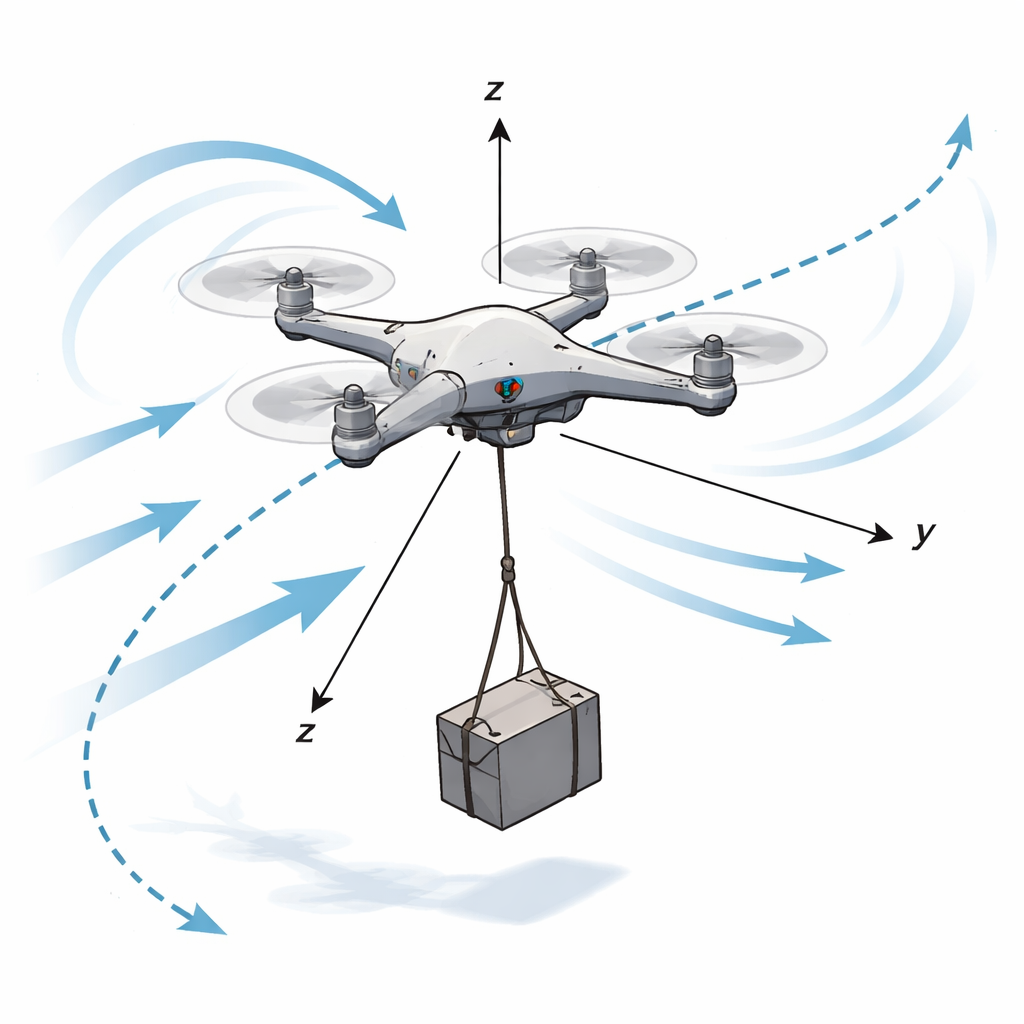
Perché vento e carichi sospesi sono così problematici
Un drone quadrotore è intrinsecamente difficile da controllare. È leggero, risponde rapidamente a piccole variazioni dei motori e i suoi movimenti lungo direzioni diverse sono strettamente accoppiati. Quando forti o rapide variazioni di vento colpiscono il drone, lo spingono in modo imprevedibile. L’aggiunta di un carico sospeso tramite cavo, come un supporto per telecamera o una bottiglia di liquido, peggiora la situazione: il carico può oscillare come un pendolo, ricombinando forze aggiuntive sul drone. I regolatori tradizionali, come il comune approccio PID o schemi più avanzati di sliding-mode e backstepping, funzionano bene solo quando gli ingegneri conoscono con precisione la fisica del drone e quando i disturbi sono modesti. Se il modello matematico è impreciso, o se vento e forze del carico cambiano in modo complesso, questi metodi possono produrre risposte lente, sovraelongazioni o visibili oscillazioni in volo.
Un cane da guardia intelligente per i disturbi nascosti
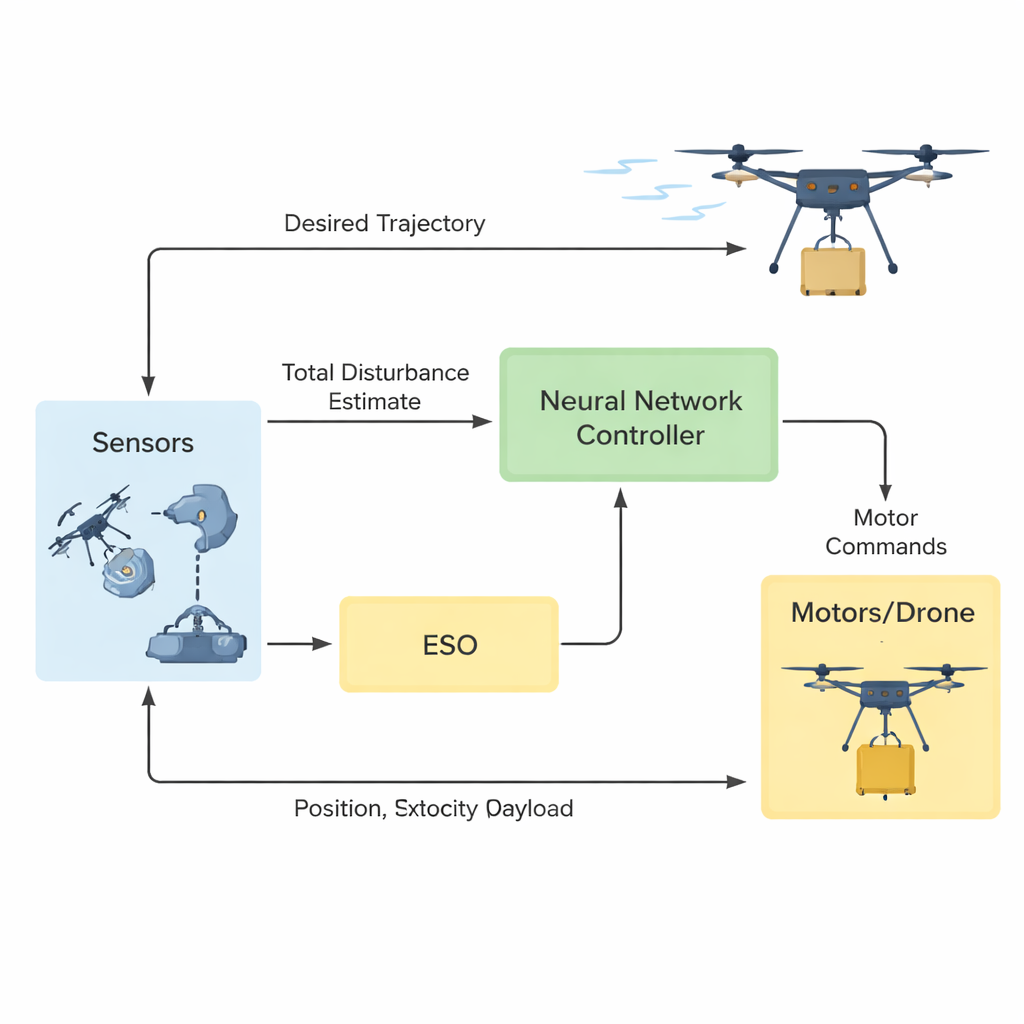
Per affrontare il problema, gli autori si basano su un concetto chiamato rejection attiva dei disturbi. Invece di cercare di modellare ogni dettaglio del vento e del carico oscillante, trattano tutte le influenze sconosciute come un unico disturbo “aggregato”. Un osservatore dello stato esteso appositamente progettato agisce come un cane da guardia matematico, inferendo continuamente questo disturbo totale dal moto del drone. Notevolmente, il loro osservatore è tarato con un solo parametro principale, il che semplifica molto la messa a punto rispetto a molti progetti esistenti. La teoria mostra che, con un’adeguata taratura, la stima del disturbo da parte dell’osservatore converge rapidamente e rimane strettamente limitata, il che significa che può essere usata come una correzione feedforward in tempo reale piuttosto che come una semplice stima approssimativa.
Lasciare che una rete neurale impari le parti difficili
Anche con buone stime del disturbo, il controllore ha comunque bisogno di sapere come i motori del drone traducono i comandi nel moto effettivo — una relazione che dipende dalla massa, dalla geometria e da altri dettagli fisici che possono cambiare nel tempo. Invece di affidarsi a un modello identificato con cura, gli autori introducono una rete neurale a funzioni di base radiali che apprende direttamente questa relazione dai segnali di volo. Al controllore basta conoscere la posizione del drone, dove dovrebbe andare e la seconda derivata della traiettoria desiderata (quanto rapidamente il punto obiettivo accelera). Una legge adattativa aggiorna continuamente i pesi interni della rete neurale per ridurre l’errore di tracciamento. Tramite un’analisi basata su Lyapunov, gli autori dimostrano che sotto questo schema adattativo gli errori di inseguimento rimangono uniformemente limitati e possono essere resi arbitrariamente piccoli, mentre gli aggiornamenti dei pesi restano stabili.
Mettere il metodo alla prova
Il team valida il proprio approccio sia tramite simulazioni al computer sia con esperimenti reali. Nelle simulazioni, al drone viene chiesto di seguire impegnative traiettorie tridimensionali a spirale mentre è colpito da raffiche di vento casuali e da forze del carico che variano nel tempo. Il nuovo controllore è confrontato con tre altre metodologie avanzate: rejection attiva lineare dei disturbi, controllo sliding-mode, controllo sliding-mode terminale senza modello e, in una prova più difficile, controllo adattivo di ordine frazionario. In diversi scenari, il metodo proposto ottiene traiettorie più fluide e errori di posizione quadratici medi inferiori, specialmente dopo l’introduzione dei disturbi. Nei test fisici, i ricercatori fanno volare un quadrotore in ambiente interno mentre due ventilatori industriali soffiando aria lo sottopongono a vento e una bottiglia d’acqua da 200 grammi è appesa sotto. Telecamere di motion capture registrano la posizione del drone. Anche sotto vento continuo e strattoni manuali al carico, il drone mantiene il punto obiettivo entro pochi centimetri e i comandi ai motori restano ben comportati, suggerendo che il metodo è praticabile su hardware reale.
Cosa significa questo per l’uso quotidiano dei droni
Per i non specialisti, la conclusione chiave è che questo lavoro offre un modo per rendere i droni più affidabili in condizioni difficili senza richiedere una conoscenza perfetta della loro fisica interna. Combinando un osservatore di disturbi semplice ma potente con un controllore basato sull’apprendimento, il sistema può adattarsi in tempo reale a raffiche di vento e carichi oscillanti, mantenendo il drone in rotta con uno sforzo di taratura minimo. Questo tipo di controllo robusto e leggero dal punto di vista del modello potrebbe facilitare l’impiego dei droni per compiti di routine in città, fattorie e fabbriche, e le stesse idee potrebbero in futuro estendersi a squadre di droni e a progetti tolleranti ai guasti che rimangono sicuri anche quando alcuni componenti falliscono.
Citazione: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Parole chiave: controllo quadrotore, stabilità del drone, disturbo del vento, controllore a rete neurale, tracciamento del carico