Clear Sky Science · it
La sferizzazione PCA migliora la tolleranza all'illuminazione per il riconoscimento visivo del luogo con firme di Fourier
I robot che trovano la strada al chiuso
Immaginate un robot che si muove in una casa o in un ufficio, con luce solare intensa un giorno e lampade deboli il giorno dopo. Per sapere dove si trova, il robot confronta ciò che la sua camera vede ora con immagini memorizzate in precedenza. Ma quando l'illuminazione cambia drasticamente, i luoghi possono apparire quasi irriconoscibili. Questo articolo esplora un metodo essenziale, basato sulla matematica, per far riconoscere ai robot i luoghi a partire da immagini panoramiche, e mostra come un trucco statistico chiamato sferizzazione PCA renda questo approccio molto più tollerante ai cambiamenti di illuminazione.
Vedere il mondo come onde, non come pixel
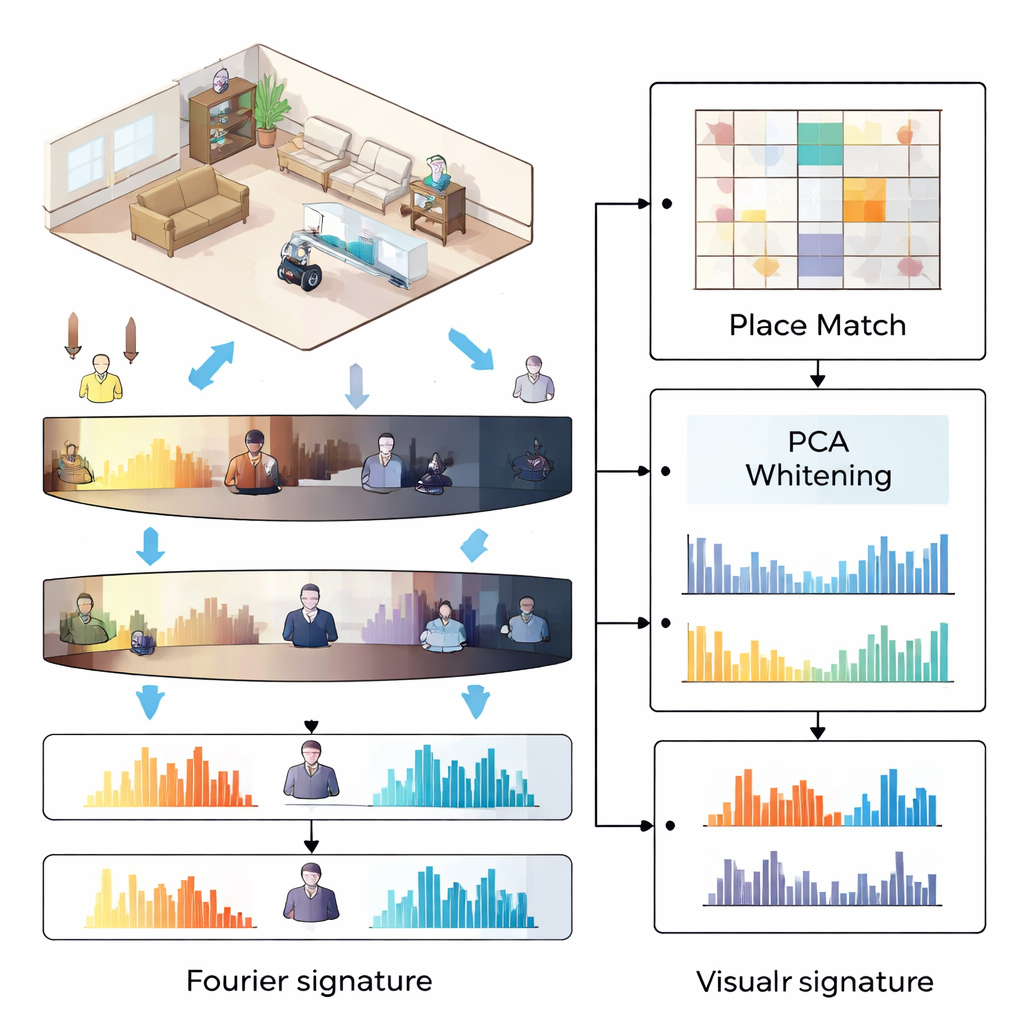
La maggior parte dei moderni sistemi di riconoscimento visivo del luogo utilizza molti piccoli dettagli dell'immagine—bordi, angoli e texture—e li combina in una «impronta» compatta. Per contro, questo lavoro si basa sulle firme di Fourier, che considerano un'immagine panoramica non come una griglia di pixel ma come una sovrapposizione di onde a diverse frequenze. La camera acquisisce una vista a 360 gradi; la panoramica viene divisa in bande orizzontali e ciascuna banda viene convertita in uno spettro di frequenza monodimensionale. Si conservano solo le ampiezze delle frequenze più basse e le si impilano in un descrittore. Poiché il metodo scarta l'informazione su dove compaiono le caratteristiche lungo il cerchio, il descrittore cambia poco quando il robot si limita a ruotare, risultando quindi intrinsecamente robusto alla rotazione.
Perché l'illuminazione compromette le firme semplici
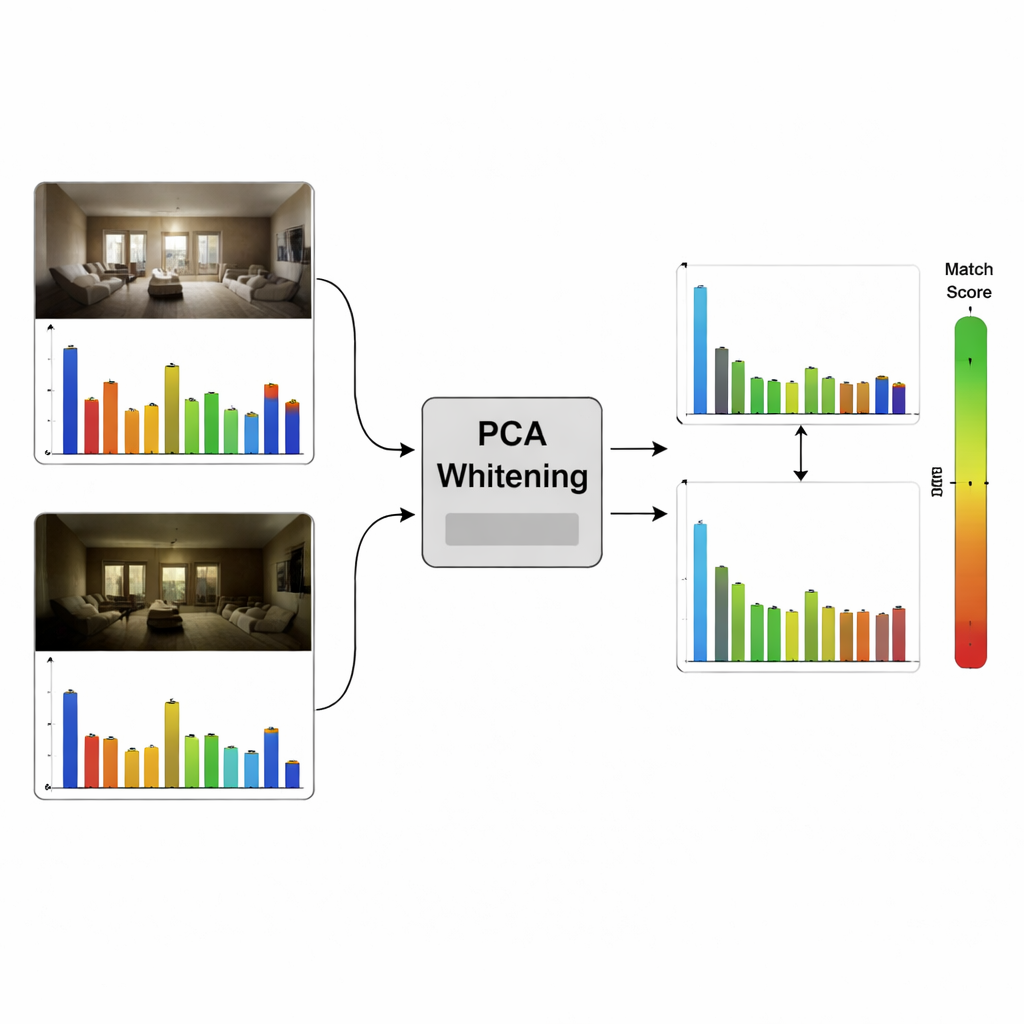
Anche se le firme di Fourier sono compatte e veloci da calcolare, faticano quando l'illuminazione cambia notevolmente tra registrazioni dello stesso luogo. Le immagini naturali tendono ad avere molta più energia alle basse frequenze che alle alte, e questo sbilanciamento è influenzato dall'illuminazione. Di conseguenza, alcune parti del descrittore dominano la misura di similarità, e molte voci sono fortemente correlate tra loro perché righe vicine nella panoramica hanno aspetto simile. Senza correzione, la decisione del sistema sul fatto che due immagini rappresentino lo stesso luogo è guidata da un piccolo sottoinsieme ridondante di valori, il che lo rende fragile in condizioni di luce diverse.
Ripulire il segnale con la sferizzazione PCA
L'autore propone di aggiungere la sferizzazione PCA come passaggio di post-elaborazione ai descrittori di Fourier. Usando una raccolta di panorami di addestramento presi in sette ambienti interni, il sistema impara come le voci del descrittore tendono a variare e a correlarsi. La sferizzazione PCA recentra il descrittore, lo ruota nelle direzioni di variazione indipendente e rimodula ogni direzione in modo che tutte abbiano uguale influenza. Questo rimuove correlazioni ridondanti e bilancia il contributo delle diverse frequenze. Poiché le voci trasformate sono ordinate per importanza, il descrittore può anche essere accorciato in sicurezza semplicemente eliminando la parte finale. Esperimenti su tre ambienti non visti con molteplici varianti di illuminazione mostrano che la sferizzazione aumenta costantemente la probabilità che il luogo corretto compaia tra i primi candidati recuperati, in particolare nel caso praticamente rilevante di restituire solo una breve lista di corrispondenze probabili.
Leggero ma competitivo con il deep learning
Per valutare come questo approccio snello si confronti con le tendenze attuali, l'articolo lo mette a confronto con AnyLoc, un recente metodo di riconoscimento visivo del luogo basato su un grande network transformer della visione. Anche AnyLoc usa una compressione basata su PCA, ma parte da feature ad alta dimensionalità prodotte dal deep learning. Sul dataset panoramico indoor, le firme di Fourier sferizzate eguagliano o addirittura superano AnyLoc quando al sistema è consentito proporre fino a circa dieci immagini candidate, un punto operativo realistico per molti robot. Crucialmente, il metodo basato su Fourier è molto più economico in termini di calcolo: si basa su trasformate di Fourier veloci e semplici operazioni matriciali sulla CPU, mentre AnyLoc richiede una potente GPU e molto più tempo per immagine.
Cosa significa per i robot di tutti i giorni
Per un lettore non specialista, il messaggio centrale è che l'uso intelligente della matematica classica può ancora competere con l'intelligenza artificiale pesante in compiti specifici. Trasformando le immagini panoramiche in descrittori bilanciati e decorrelati, la sferizzazione PCA rende un semplice metodo di riconoscimento del luogo basato sulle frequenze molto più resistente ai cambiamenti di illuminazione. I robot che adottano questo approccio possono localizzarsi in modo affidabile in case e uffici sotto un ampio spettro di condizioni di illuminazione, usando risorse di calcolo modeste. Questo rende la navigazione visiva robusta più accessibile a robot più piccoli ed economici che un giorno potrebbero condividere i nostri spazi quotidiani.
Citazione: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Parole chiave: riconoscimento visivo del luogo, robot mobili, imaging panoramico, firme di Fourier, sferizzazione PCA