Clear Sky Science · it
Pursuit pura avanzata con controllo dinamico dello sterzo per robot mobili autonomi e applicazione alla navigazione sicura negli impianti chimici
Robot che restano sulla traiettoria
Man mano che i robot escono dai capannoni puliti e si spingono nei campi agricoli e negli impianti chimici, devono seguire percorsi stretti con grande precisione. Un piccolo oscillare può schiacciare raccolti, urtare tubazioni o rotolare in aree con gas infiammabili. Questo articolo descrive un nuovo modo per far sterzare i robot su ruote e controllare la loro velocità in modo che possano rimanere vicini a una rotta pianificata sia in spazi aperti sia in siti industriali angusti.
Perché guidare un robot è difficile
Molti robot mobili autonomi oggi usano una regola semplice chiamata “pure pursuit” per seguire un percorso. Il robot guarda un punto a breve distanza lungo la traccia, mira verso quel punto e ripete velocemente il processo. In pratica, gli ingegneri devono decidere quanto lontano il robot «guarda avanti» e a quale velocità si muove. Se la distanza di lookahead è troppo corta, il robot reagisce nervosamente e può ondeggiare da un lato all’altro. Se è troppo lunga, reagisce troppo lentamente e taglia le curve, soprattutto in percorsi stretti o a velocità più alte. All’aperto si aggiunge un’altra complicazione: la posizione del robot è stimata combinando segnali satellitari, sensori di movimento e dati di rotazione delle ruote, ognuno con propri errori e ritardi.
Un modo più intelligente per sterzare e impostare la velocità
Gli autori propongono un metodo migliorato chiamato Pure Pursuit con Controllo Dinamico dello Sterzo (PP-DSC). Invece di mantenere fissi lookahead e velocità, il robot li regola in tempo reale in base a quanto sta sterzando. Quando l’angolo di sterzo è piccolo e il percorso è quasi rettilineo, il robot usa un lookahead più lungo e una velocità maggiore per un viaggio fluido ed efficiente. Con l’aumentare dell’angolo di sterzo nelle curve, la distanza di lookahead si riduce e la velocità cala automaticamente, dando più tempo di reazione e riducendo lo scorrimento laterale. Questo comportamento è stato implementato su un robot a quattro ruote di tipo automobilistico che usa un moderno framework software per la robotica insieme a un posizionamento satellitare ad alta precisione, un sensore inerziale e encoder delle ruote per stimare il moto.

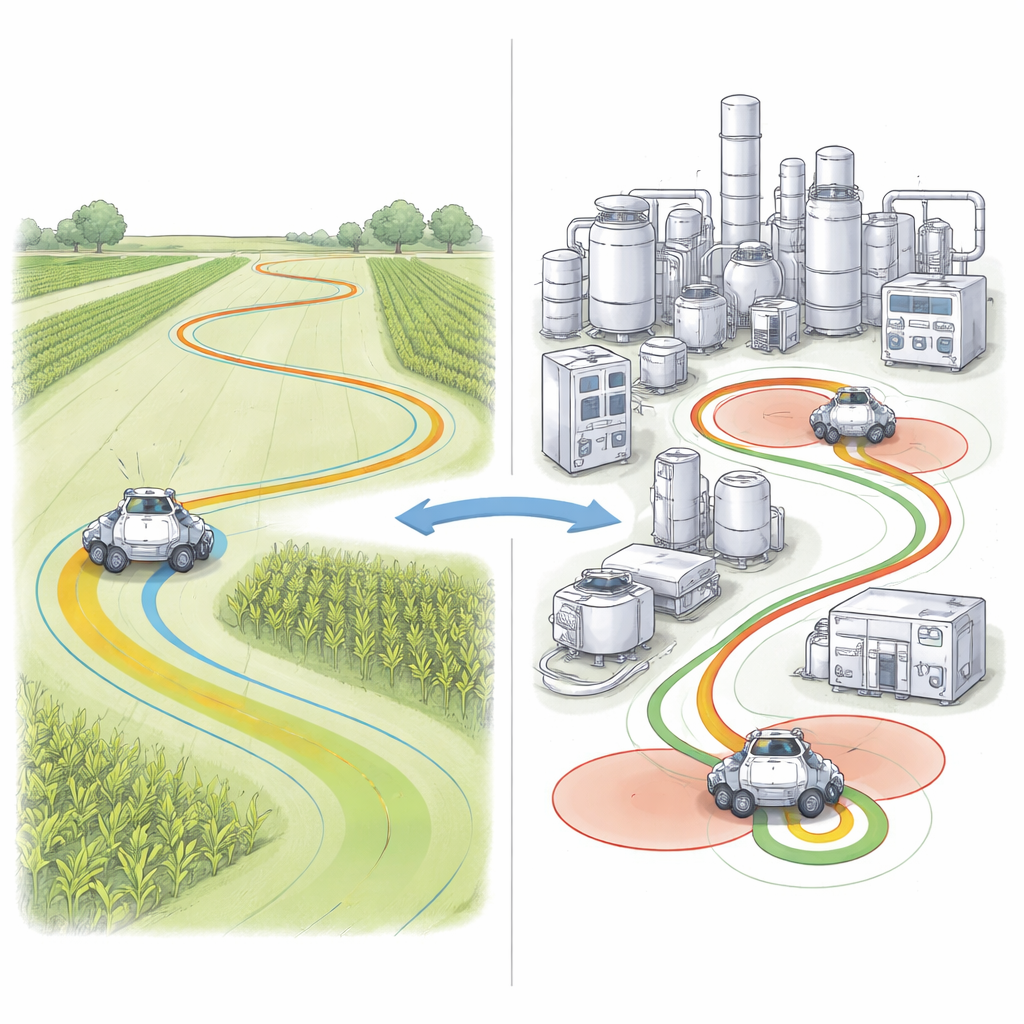
Test in campi e impianti chimici virtuali
Per valutare l’efficacia del PP-DSC, il team ha eseguito esperimenti all’aperto su tre percorsi di base: una linea retta, un anello e una figura a otto, a velocità da 1 a 5 metri al secondo. Hanno confrontato il nuovo metodo con l’approccio tradizionale di pure pursuit. Il controllore migliorato ha mantenuto il robot molto più vicino al percorso previsto in tutti i casi. Sulle linee rette, l’errore laterale medio è sceso a circa cinque centimetri, e sui percorsi curvi l’errore è rimasto sotto gli otto centimetri. Invece, il metodo tradizionale poteva deviare di alcune decine di centimetri e mostrava picchi maggiori all’ingresso o all’uscita dalle curve, soprattutto a velocità maggiori.
Aggiungere sicurezza nelle zone a rischio
I ricercatori hanno anche esaminato come potrebbe comportarsi un tale robot all’interno di un impianto chimico, dove potrebbe ispezionare reattori caldi o trasportare campioni. Invece di costruire un banco di prova industriale, hanno usato un modello computerizzato dettagliato di un impianto biodiesel che includeva la posizione delle apparecchiature e le zone a maggior rischio di incendio ed esplosione. Hanno esteso il loro controllore con un fattore di sicurezza che rallenta automaticamente il robot quando entra in queste zone pericolose, basandosi su un indice standard di incendio ed esplosione usato nella sicurezza di processo. Le simulazioni hanno mostrato che questa versione attenta alla sicurezza del PP-DSC aumentava l’errore di tracciamento solo leggermente—meno dell’un percento in media—garantendo però che il robot riducesse la velocità attorno alle apparecchiature pericolose.
Scegliere lo strumento giusto per ogni compito
Un risultato interessante è che non esiste una strategia di sterzo unica migliore in ogni situazione. Nei campi aperti con curve dolci, il metodo dinamico ha nettamente superato l’approccio tradizionale, mantenendo la traiettoria del robot stretta e fluida anche a velocità maggiori. Nella geometria angusta di un impianto chimico, invece, la semplice pure pursuit con lookahead fisso talvolta ha dato risultati migliori, soprattutto in anelli stretti e percorsi a «figura otto» con auto-intersezioni, dove il lookahead dinamico poteva spostare involontariamente il robot sul ramo sbagliato del tracciato. Gli autori concludono che i robot dovrebbero passare da una strategia all’altra a seconda della forma del percorso: utilizzare il controllore potenziato e integrato con la sicurezza per curve moderate e percorsi con rischio, e tornare a uno schema a lookahead fisso per tracciati molto stretti o ad anello. Per i non esperti, il messaggio chiave è che una navigazione robotica sicura e affidabile in impianti e campi reali non riguarda solo buone mappe e sensori—anche il modo in cui il robot sceglie dove guardare e quanto velocemente andare è altrettanto importante.
Citazione: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Parole chiave: robot mobili autonomi, seguimento del percorso, controllo dello sterzo, navigazione GNSS-RTK, safety negli impianti chimici