Clear Sky Science · it
Rilevamento leggero degli obiettivi e tracciamento multi-obiettivo per ispezioni con UAV in miniere a cielo aperto
Occhi più intelligenti nei cieli
Le miniere a cielo aperto sono luoghi vasti e ostili dove camion pesanti, escavatori e persone si muovono continuamente. Mantenere la sicurezza e il funzionamento regolare richiede spesso molti operatori a terra e costose apparecchiature di posizionamento, eppure piccoli guasti e intrusi possono comunque sfuggire. Questo articolo esplora come droni intelligenti e leggeri possano pattugliare queste miniere dall’alto, rilevando automaticamente attrezzature, persone e problemi in tempo reale, operando però entro i ristretti limiti di calcolo dell’elettronica di bordo.
Perché le miniere hanno bisogno di migliori guardiani
Le miniere moderne si affidano già a strumenti come il posizionamento satellitare e i beacon radio speciali per tracciare camion e macchine. Ma questi sistemi “attivi” presentano punti ciechi: i segnali possono essere bloccati da pareti ripide, polvere o interferenze, e funzionano solo su veicoli e persone che portano i dispositivi appropriati. Inoltre non possono mostrare come sia fatto effettivamente un guasto. I droni, invece, possono sorvolare terreni difficili, catturare immagini e video ricchi di informazioni e seguire bersagli non cooperativi come veicoli non autorizzati. La sfida è che gli algoritmi di visione potenti richiedono normalmente computer pesanti, mentre i droni hanno limiti di peso, energia e capacità di elaborazione. Gli autori si sono posti l’obiettivo di progettare un sistema di rilevamento e tracciamento che sia sia accurato sia sufficientemente leggero da girare direttamente su un drone.
Insegnare ai droni a vedere bersagli piccoli e nascosti
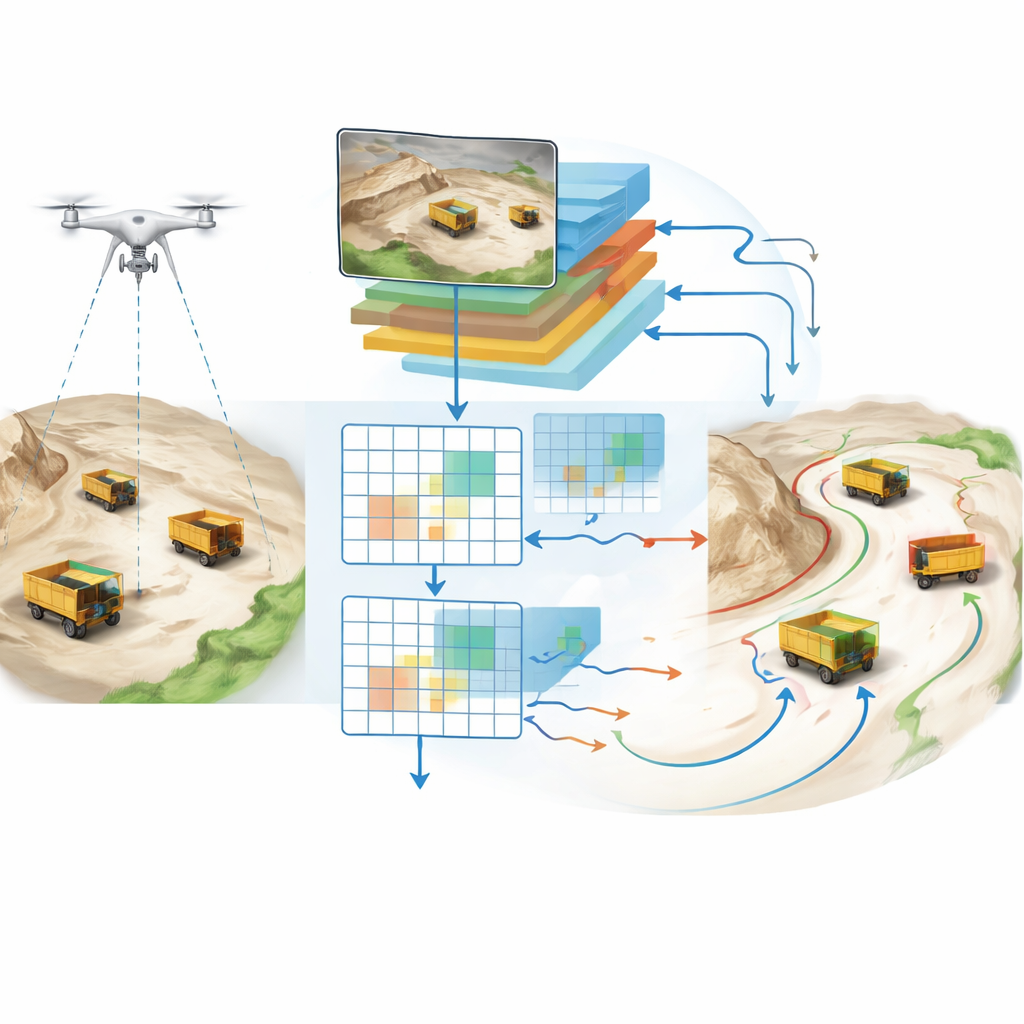
Al centro del lavoro c’è una versione migliorata di un popolare modello di visione chiamato YOLO, sintonizzata specificamente per le miniere a cielo aperto. I ricercatori rimodellano il “backbone” del modello in modo che possa seguire i contorni irregolari di camion, escavatori e cumuli di roccia, invece di affidarsi a filtri rigidi a griglia. Ridisegnano inoltre la parte della rete che fonde informazioni provenienti da scale d’immagine grossolane e fini, così che macchine piccole e distanti e quelle più grandi e vicine vengano catturate insieme senza confusione. Su tutto questo, un nuovo modulo decisionale leggero concentra l’attenzione sui dettagli più informativi della scena, aiutando il sistema a distinguere piccoli punti di guasto e macchine parzialmente nascoste dallo sfondo affollato.
Far entrare modelli potenti su un drone
Anche con questi miglioramenti, un modello di visione può facilmente diventare troppo grande per l’hardware di un drone. Per risolvere il problema, il team applica una strategia di potatura accurata che analizza quali connessioni interne contribuiscono maggiormente alle prestazioni e poi elimina il resto. Questo processo riduce il numero di parametri e la quantità di calcolo preservando i percorsi più efficaci nella rete. A un livello di potatura ottimale, il sistema mantiene un’elevata accuratezza di rilevamento ma riduce dimensione del modello, operazioni e tempo di risposta a sufficienza per funzionare su un processore embedded compatto, consumando meno energia e prolungando il tempo di volo. I test su un dataset minerario personalizzato e su un benchmark pubblico per droni mostrano che il modello potato supera diverse alternative note, soprattutto per bersagli piccoli e parzialmente nascosti.
Da istantanee a tracce fluide
Individuare oggetti in un’immagine è solo metà della storia; le miniere devono anche sapere come ogni camion o persona si muove nel tempo. Per questo, gli autori migliorano un approccio esistente al tracciamento multi-oggetto in modo che gestisca meglio scene affollate, veicoli simili e cambiamenti improvvisi nel moto. Creano una misura di similarità combinata che considera la posizione di un bersaglio, il suo aspetto e persino se appare carico o vuoto. Correggono inoltre le previsioni di movimento per tenere conto di variazioni di accelerazione, come quando un camion svolta o sale una pendenza. Insieme, questi interventi riducono gli scambi di identità — quando un veicolo viene scambiato per un altro — e mantengono le traiettorie lisce e affidabili, il tutto restando sufficientemente veloce per l’uso in tempo reale su hardware di classe drone.
Verso pattugliamenti minerari senza equipaggio e sempre attivi
Infine, gli autori inseriscono i moduli di visione e tracciamento all’interno di un sistema di ispezione multilivello che può coordinare più droni, trasmettere dati via 5G e collegamenti ad-hoc e fornire risultati al controllo a terra. In esperimenti su miniere reali, questa configurazione migliora nettamente accuratezza e stabilità del monitoraggio delle attrezzature rispetto ai metodi tradizionali. Per i non specialisti, il dato principale è che lo studio mostra una via praticabile per avere piccoli robot volanti ed efficienti che sorvegliano continuamente ampi siti industriali, rilevando piccoli guasti, visitatori non registrati e situazioni a rischio prima che degenerino — senza bisogno di computer ingombranti o di dense reti di beacon su ogni veicolo.
Citazione: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Parole chiave: ispezione con droni, estrazione a cielo aperto, rilevamento oggetti, tracciamento multi-oggetto, modelli AI leggeri