Clear Sky Science · it
Interfaccia cervello-macchina intracorticale basata sull’attività del premotore ventrale di macachi
Insegnare al cervello a muovere un cursore
Immagina di guidare un cursore del computer o un braccio robotico usando solo il pensiero, anche se i tuoi muscoli non possono più muoversi. Le interfacce cervello–macchina (BMI) puntano a rendere questo possibile traducendo l’attività cerebrale in comandi per dispositivi esterni. La maggior parte dei sistemi finora ha sfruttato una principale area del movimento nel cervello, ma cosa succede se quella regione è danneggiata, come in seguito a ictus o SLA? Questo studio si chiede se un’altra area vicina, solitamente associata alla pianificazione delle azioni della mano e all’osservazione dei movimenti altrui, possa anch’essa pilotare in modo affidabile una BMI.
Una nuova area cerebrale entra in gioco
Le BMI classiche leggono soprattutto i segnali dalla corteccia motoria primaria, la striscia di tessuto cerebrale che controlla direttamente i movimenti volontari, e da una regione di pianificazione vicina chiamata corteccia premotoria dorsale. I ricercatori hanno rivolto l’attenzione a un altro vicino: la corteccia premotoria ventrale, in particolare una zona chiamata F5c. Nei macachi, F5c è ricca di cellule che si attivano quando l’animale raggiunge e afferra oggetti e persino quando osserva azioni su uno schermo. Questa combinazione di risposte legate al movimento e all’osservazione suggeriva che F5c potesse essere adatta a controllare un cursore o un “avatar” robotico senza richiedere il movimento del corpo.
Macachi, microelettrodi e obiettivi in movimento
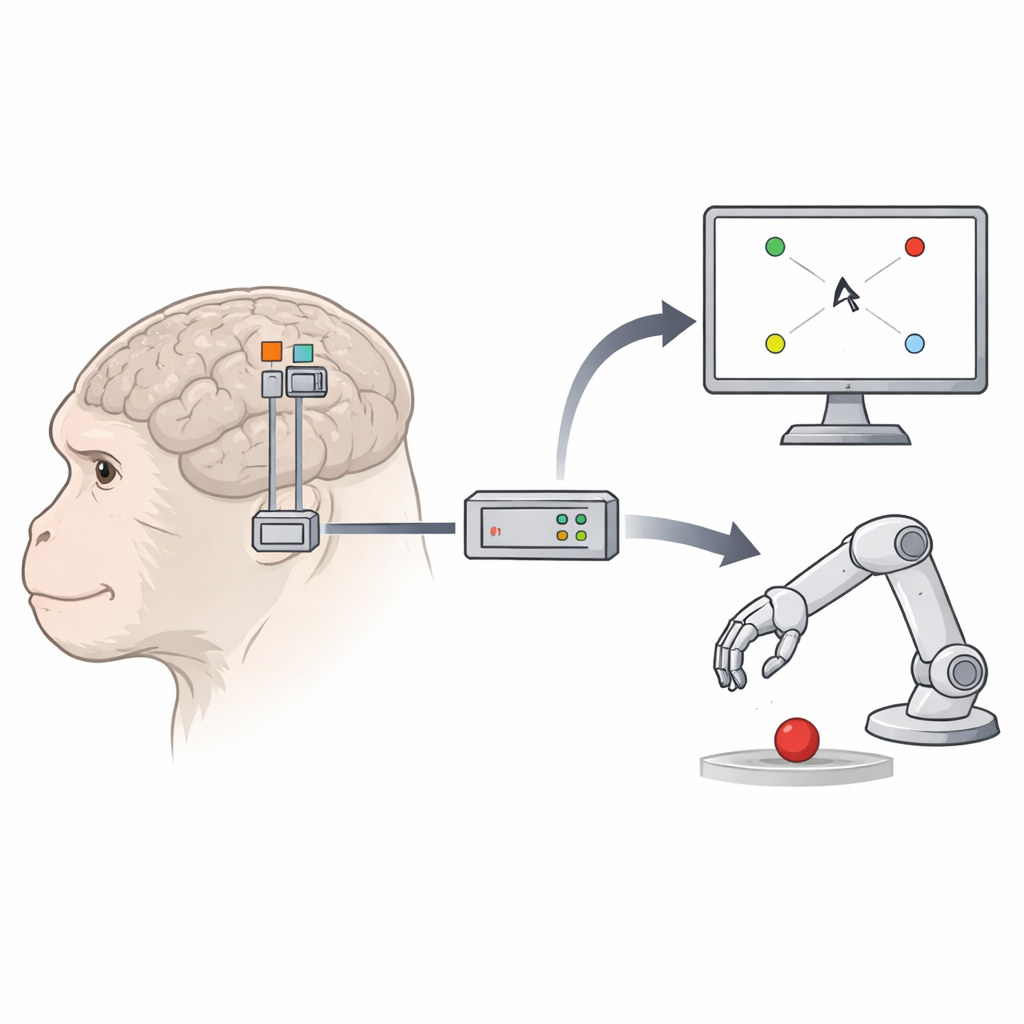
Due macachi macaque sono stati impiantati con minuscole griglie da 96 elettrodi in tre punti: corteccia motoria primaria, corteccia premotoria dorsale e F5c. In sessioni quotidiane, gli animali eseguivano diversi compiti visivamente semplici ma comportamentalmente impegnativi. In un compito, toccavano il centro di uno schermo e poi raggiungevano uno degli otto bersagli esterni, mentre un piccolo cursore sullo schermo si spostava dal centro verso lo stesso bersaglio. In un secondo compito, mantenevano la mano ferma e si limitavano a osservare il cursore viaggiare verso i bersagli. In una terza configurazione più realistica, il cursore era sostituito da un braccio robotico avatar 3D che raggiungeva bersagli in una scena virtuale. Attraverso questi compiti, il team ha potuto confrontare quanto efficacemente ciascuna area cerebrale pilotasse il cursore o l’avatar.
Come i segnali cerebrali sono diventati movimento fluido
Durante una fase di addestramento, il cursore o l’avatar seguivano percorsi generati dal computer, dolcemente curvi, mentre i macachi o si muovevano o osservavano. Allo stesso tempo, gli elettrodi registravano rapidi scoppi di attività cerebrale. I ricercatori hanno quindi addestrato un decodificatore—uno strumento matematico che impara a mappare i modelli di scarica neurale sulle velocità del cursore o dell’avatar sullo schermo. Per catturare solo i canali più informativi, hanno scelto gli elettrodi la cui attività seguiva la direzione e la velocità del movimento. Hanno usato un metodo che isola i pattern cerebrali più strettamente legati al comportamento e lo hanno arricchito con una fase non lineare, permettendo al sistema di cogliere relazioni più complesse tra attività neurale e movimento. Nella fase di decodifica, il computer ha smesso di guidare il cursore o l’avatar; invece, il decodificatore ha usato i segnali cerebrali in tempo reale, aggiornati ogni 50 millisecondi, per sterzare il movimento sullo schermo. Il decodificatore è stato riaddestrato periodicamente in background in modo da adattarsi mentre le risposte neurali cambiavano nel tempo.

Quanto ha performato la “nuova” area?
La domanda chiave era se F5c potesse eguagliare o avvicinarsi alle prestazioni delle aree di controllo tradizionali. In entrambi i macachi, la decodifica basata su F5c inizialmente arrancava rispetto agli altri quando si muoveva il cursore, specialmente quando gli animali stavano solo osservando e non muovevano la propria mano. Ma con il progredire delle sessioni—e con l’aumentare del numero di elettrodi che fornivano segnali affidabili legati al movimento—F5c ha recuperato terreno. In diverse condizioni, le sue prestazioni sono risultate pari a quelle della corteccia motoria primaria e in alcune sessioni successive hanno anche superato quest’ultima nel controllo passivo del cursore. Nel controllo dell’avatar robotico, il successo complessivo è stato più basso in tutte le aree, ma F5c ha comunque supportato un controllo significativo, soprattutto quando è stato combinato con un algoritmo assistivo leggero che guidava sottilmente l’avatar verso il bersaglio. È importante notare che i neuroni in tutte e tre le regioni hanno mostrato pattern simili di sintonia direzionale e attività di popolazione durante la fase di addestramento guidata dal computer e nella fase di controllo attivo, con solo un sottogruppo che ha cambiato le direzioni preferite man mano che i macachi imparavano a pilotare la BMI.
Cosa significa per le future neurotecnologie
Per un non specialista, la conclusione cruciale è che l’area premotoria ventrale F5c—una volta considerata principalmente come regione di pianificazione e osservazione delle azioni—può anche fungere da hub pratico per il controllo delle interfacce cervello–macchina. Quando sono disponibili abbastanza segnali legati al movimento, i decodificatori addestrati sull’attività di F5c possono guidare un cursore su schermo o un robot assistivo quasi altrettanto bene quanto quelli basati sull’area motoria classica. Ciò suggerisce che le future BMI cliniche potrebbero non dover dipendere da una singola regione corticale. Per persone la cui corteccia motoria primaria è danneggiata, regioni di pianificazione vicine come la corteccia premotoria ventrale potrebbero offrire una via alternativa per riconquistare il controllo di strumenti digitali, dispositivi protesici o ausili per la mobilità.
Citazione: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
Parole chiave: interfaccia cervello-macchina, corteccia motoria, corteccia premotoria, decodifica neurale, controllo di protesi