Clear Sky Science · it
Un sistema fuzzy di tipo 3 basato su una struttura virtuale per il rilevamento predittivo, la compensazione e il controllo di guasti di sensori e attuatori in sistemi non lineari
Mantenere le macchine in funzione quando i componenti si guastano
Le tecnologie moderne — dalle braccia robotiche in fabbrica agli impianti chimici che regolano l’acidità — dipendono da sensori e attuatori che silenziosamente mantengono il funzionamento. Ma quando queste parti deviano, si bloccano o guastano, un sistema può diventare insicuro molto prima che qualcuno se ne accorga. Questo articolo introduce un nuovo approccio che permette alle macchine di rilevare e correggere tali problemi in autonomia, anche quando gli ingegneri non dispongono di un modello matematico preciso del comportamento interno del sistema.
Perché i problemi nascosti sono così difficili da individuare
In molti contesti reali il comportamento di un sistema è fortemente non lineare: piccole variazioni in ingresso possono provocare grandi e inattesi sbalzi in uscita. I metodi di controllo tradizionali presumono che i progettisti conoscano le equazioni che governano questo comportamento e che sensori e attuatori funzionino sostanzialmente come previsto. Nella pratica, i componenti invecchiano, diventano rumorosi o vengono sostituiti con hardware leggermente diverso. I controller tolleranti ai guasti convenzionali o prevedono margini di sicurezza fissi (metodi passivi) o si basano su modelli accurati per rilevare e gestire i guasti (metodi attivi). Entrambe le soluzioni faticano quando il sistema cambia nel tempo o quando il funzionamento interno non è completamente noto. Gli autori sostengono che l’industria abbia bisogno di controller che apprendano dai dati in tempo reale, riconoscano quando sensori o attuatori si comportano male e correggano quei guasti in tempo reale senza richiedere un progetto dettagliato del sistema.
Un controller che apprende trattando il sistema come una scatola nera
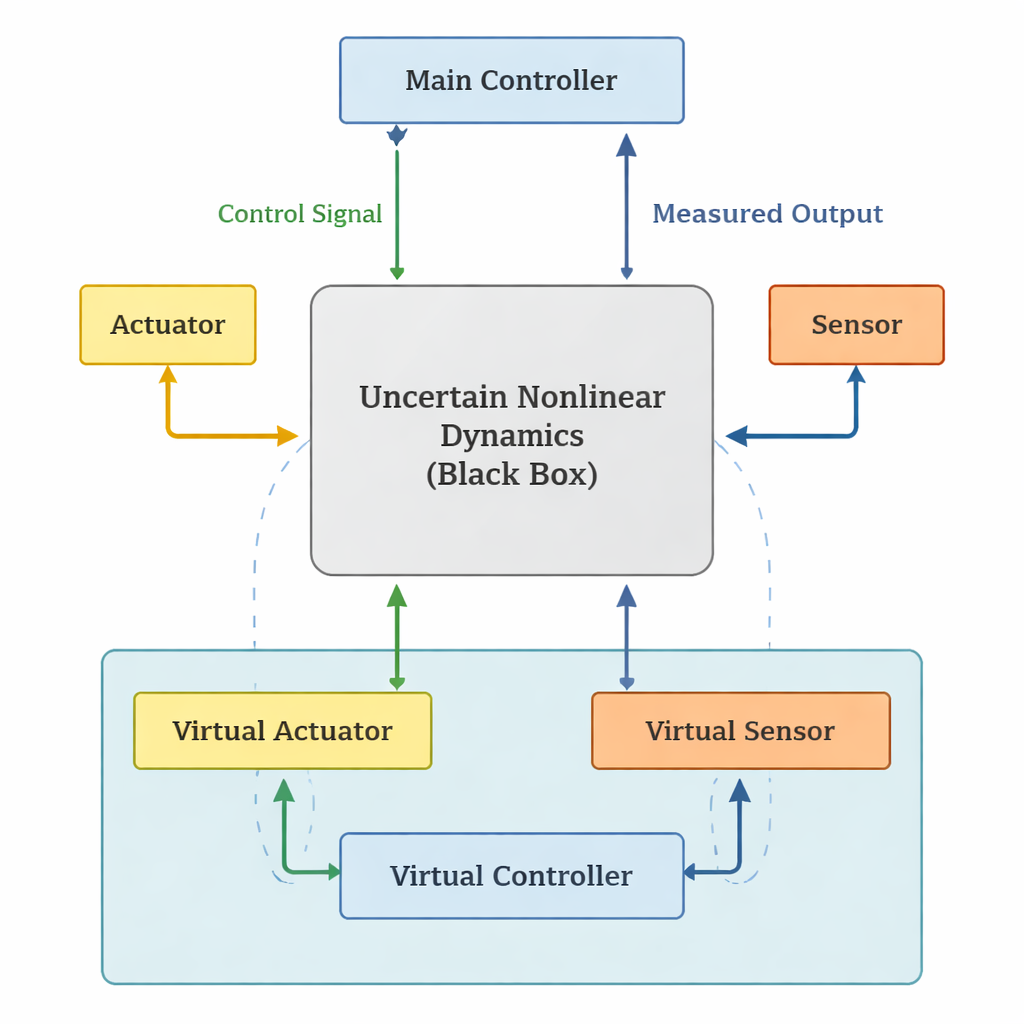
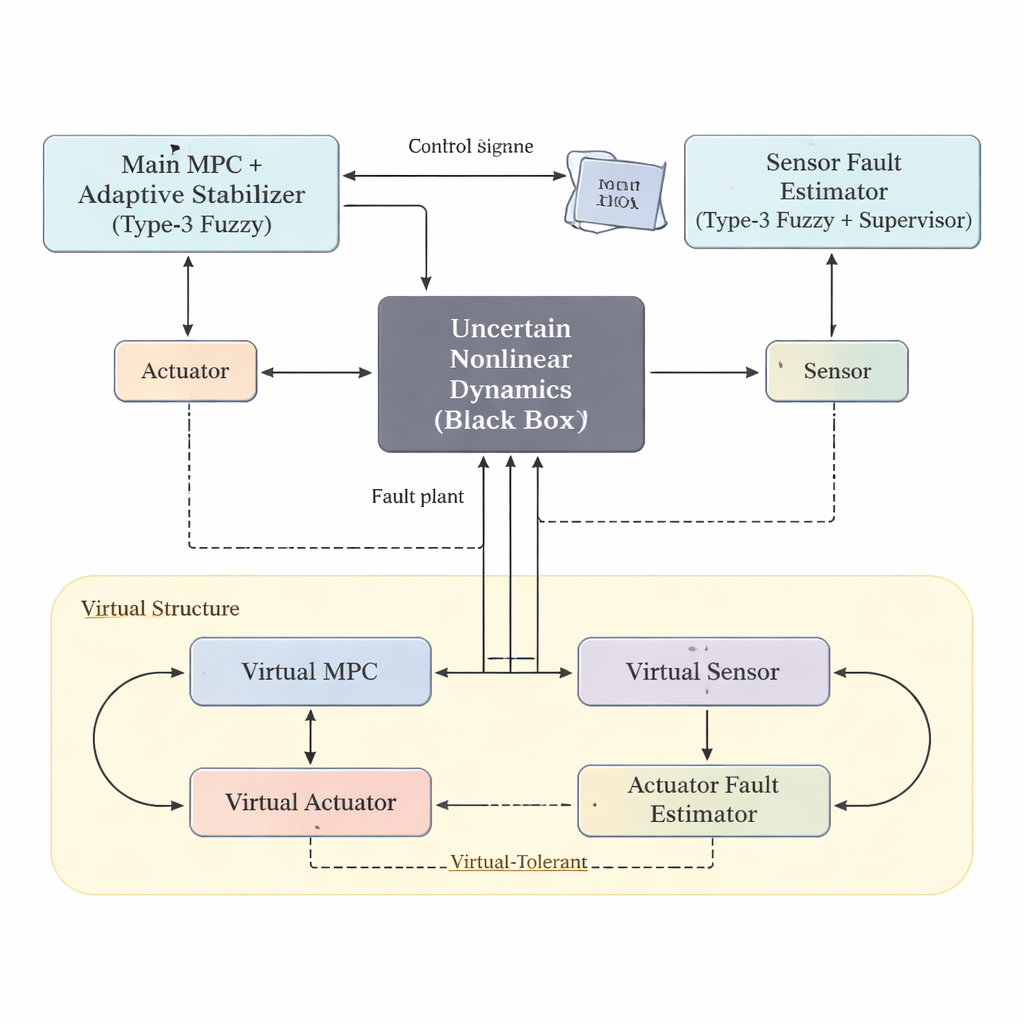
Il quadro proposto considera l’impianto esclusivamente come una scatola nera: osserva soltanto i segnali di controllo inviati e le uscite misurate dai sensori. Al centro c’è un sistema di logica fuzzy di tipo 3, una forma avanzata di modellazione fuzzy progettata per gestire forte incertezza e rumore di misura. Questo sistema fuzzy apprende online una descrizione compatta ingresso–uscita della dinamica sconosciuta, mentre un controller predittivo del modello (MPC) usa il modello appreso per pianificare le mosse di controllo future su un orizzonte breve. Un’unità adattativa stabilizzante opera in parallelo, garantendo che, anche se il modello è imperfetto o i parametri variano, il feedback combinato mantenga gli errori di inseguimento limitati e infine tenda a portarsi verso zero.
Osservare gli osservatori: rilevamento dei guasti di sensori e attuatori
Il framework divide la gestione dei guasti in due parti coordinate. Prima, un’unità per guasti ai sensori utilizza due stimatori fuzzy di tipo 3 aggiuntivi più un blocco di supervisione per inferire quanto una lettura del sensore si sia discostata dal suo valore di regime atteso. Da ciò genera un segnale correttivo che “contorce” efficacemente la misura difettosa in modo che il controller principale continui a percepire un’uscita affidabile. Secondo, il metodo costruisce una struttura virtuale che rispecchia il sistema reale: include un sensore virtuale, un attuatore virtuale, un proprio identificatore fuzzy e un MPC virtuale. Poiché il ciclo virtuale non subisce il degrado dell’attuatore reale, le differenze tra i percorsi di controllo virtuale e reale rivelano quanto stia peggiorando l’attuatore reale. Una formula semplice trasforma questo scarto in una stima del livello di guasto, che viene poi compensata nel segnale di controllo principale.
Dimostrare la stabilità e test su robot e serbatoi chimici
Per mostrare che l’approccio non è solo intuitivo ma anche matematicamente solido, gli autori costruiscono una funzione di Lyapunov — una sorta di misura di energia — che include errori di inseguimento, errori di modellazione e i parametri fuzzy adattabili. Derivano leggi di aggiornamento per i termini adattativi in modo che questa energia diminuisca sempre, dimostrando che gli errori si riducono nel tempo anche in presenza di disturbi e guasti. Le simulazioni testano quindi il metodo su due esempi molto diversi: un braccio robotico a un singolo giunto e un processo di neutralizzazione del pH in un serbatoio chimico. In entrambi i casi le dinamiche vere sono trattate come completamente sconosciute, i parametri variano e durante il funzionamento vengono introdotti guasti sia ai sensori sia agli attuatori. Il controller mantiene un inseguimento accurato, apprende rapidamente l’entità dei guasti e mantiene bassi i livelli di rischio ed errore, superando controller fuzzy più semplici e altri schemi tolleranti ai guasti avanzati presenti in letteratura.
Cosa significa questo per i sistemi reali
Per i non specialisti, il messaggio chiave è che questo metodo conferisce ai sistemi complessi una sorta di consapevolezza intrinseca. Invece di fare affidamento su un modello perfetto o su una riallocazione manuale da parte degli ingegneri, il controller impara continuamente dai dati che osserva, riconosce quando sensori o attuatori iniziano a fornire informazioni errate o a indebolirsi e corregge automaticamente le sue azioni per mantenere le prestazioni stabili. Poiché richiede solo dati di ingresso e uscita, in linea di principio può essere applicato a molte macchine diverse senza riprogettarle da zero. Sebbene i risultati si basino su simulazioni e le questioni hardware debbano ancora essere esplorate, il lavoro indica la strada verso robot, processi industriali e altri sistemi autonomi più resilienti che restano affidabili anche quando componenti e ambienti sono lontani dall’ideale.
Citazione: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Parole chiave: controllo tollerante ai guasti, logica fuzzy, controllo predittivo, guasti di sensori e attuatori, sistemi non lineari