Clear Sky Science · it
Ricerca su un metodo di posizionamento nel smistamento di pacchi in logistica disordinata
Perché uno smistamento dei pacchi più intelligente è importante
Ogni ordine online che effettui scatena un balletto nascosto di scatole in giganteschi centri logistici. Prima che un pacco possa correre verso la tua porta, deve essere individuato, afferrato, misurato, scannerizzato e instradato—spesso da un cumulo caotico di pacchi misti. Oggi gran parte di questa prima fase di “disfare il caos” si affida ancora a operatori umani che svolgono compiti ripetitivi e faticosi. Questo studio presenta un nuovo metodo basato sulla visione che aiuta i robot a trovare in modo affidabile dove afferrare ogni pacco in un ammasso, avvicinandosi un passo in più a uno smistamento completamente automatizzato, più veloce e meno gravoso dal punto di vista del lavoro.
Da cumuli disordinati a dati utili per i robot
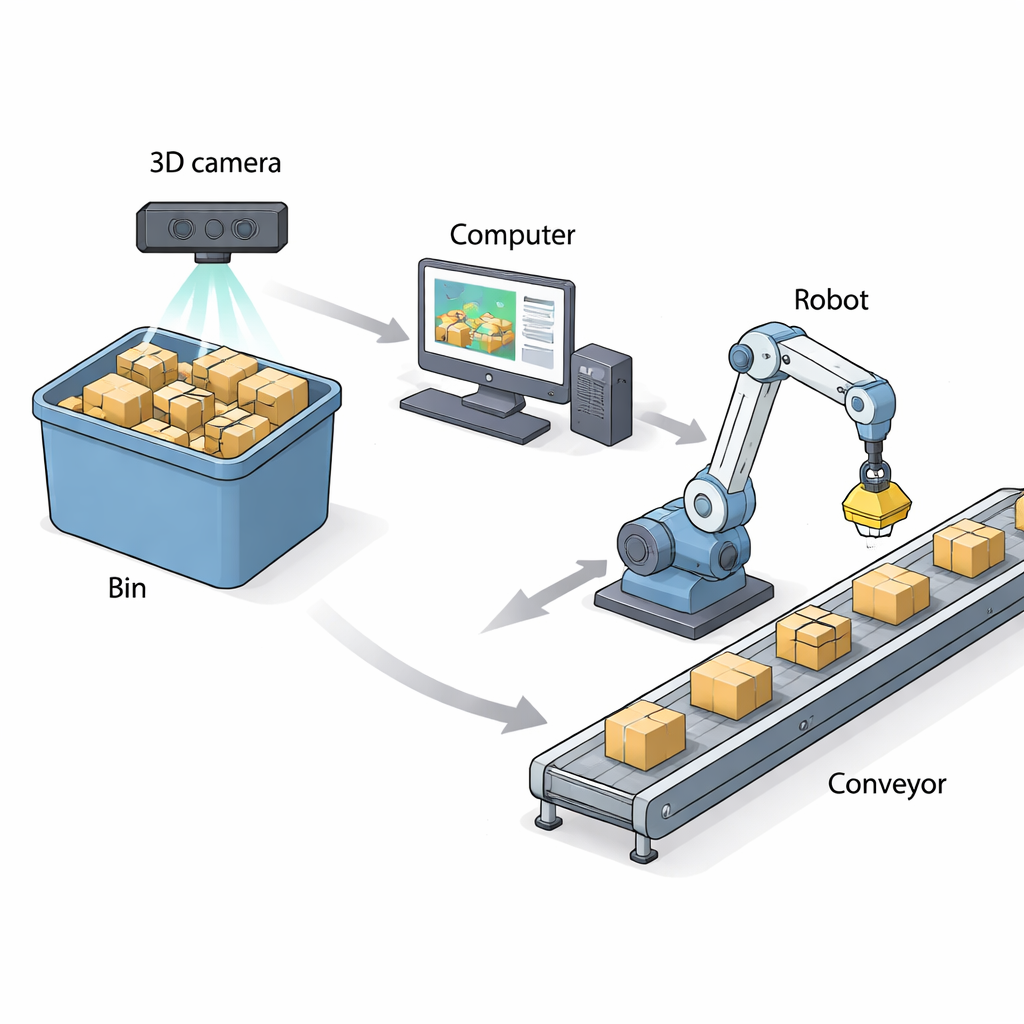
I ricercatori si concentrano su quelli che chiamano pacchi della logistica “disordinata”: scatole quotidiane e buste morbide gettate nei contenitori senza un ordine particolare, talvolta schiacciate o piegate per l’impilamento. Per sostituire gli operatori umani in questo ambiente caotico, un robot ha prima bisogno di sapere esattamente dove raggiungere e come orientare la propria pinza sulla superficie del pacco bersaglio. Il team costruisce un sistema attorno a una camera 3D che cattura sia un’immagine a colori sia una mappa di profondità dello strato superiore dei pacchi. Una moderna rete di riconoscimento (basata su YOLOv8) individua i singoli pacchi nell’immagine a colori, mentre la mappa di profondità rivela la loro forma tridimensionale. Questa combinazione permette al computer di scegliere il miglior pacco da afferrare successivamente—uno che non sia troppo occluso e sufficientemente distante dai bordi del contenitore—prima di calcolare un punto di presa accurato.
Trovare un punto di presa stabile con tre punti e un’ombra
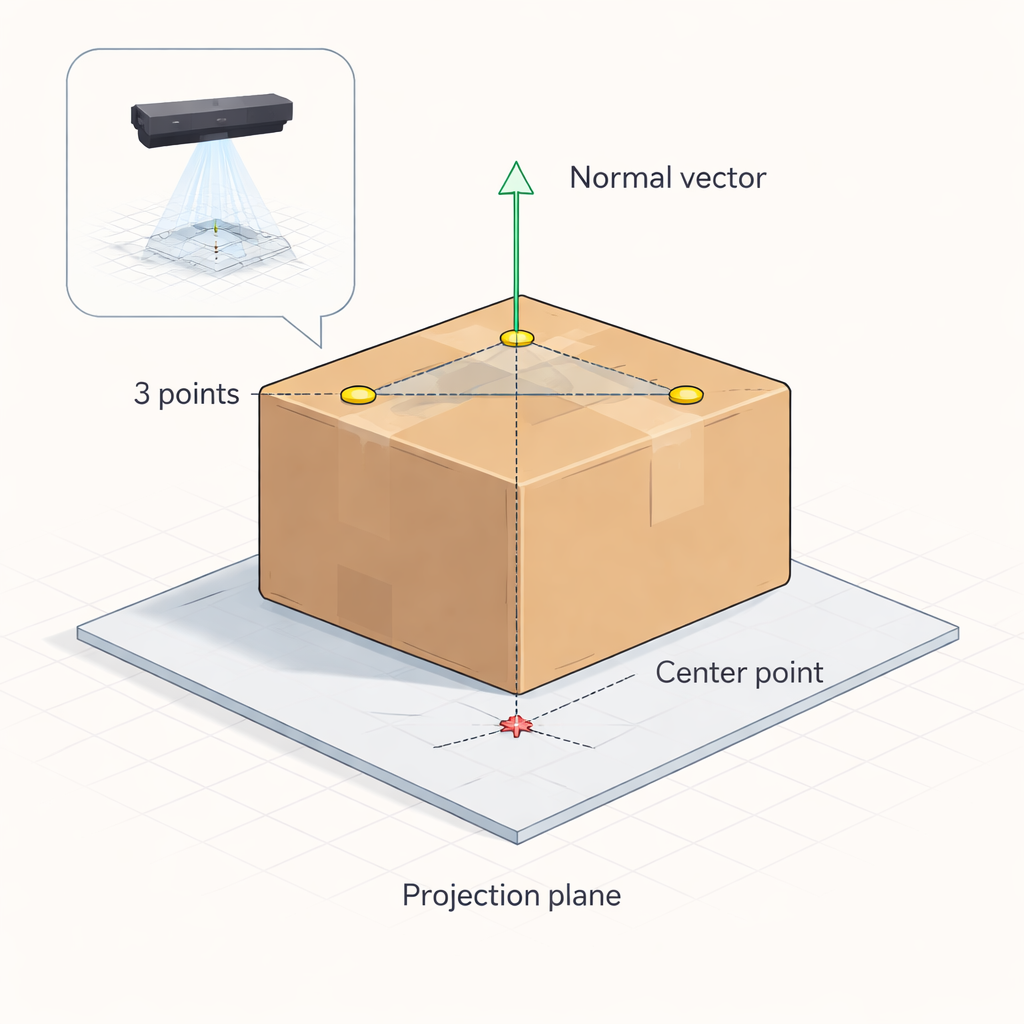
Al centro del metodo c’è un trucco geometrico che gli autori chiamano algoritmo di centratura per orientamento‑proiezione a tre punti. Una volta scelto un pacco bersaglio, il sistema seleziona casualmente tre punti sulla sua superficie superiore a partire dai dati di profondità. Questi tre punti definiscono un piano, proprio come tre spilli su un tavolo definiscono l’inclinazione del tavolo stesso. Da questo piano, l’algoritmo calcola una direzione “normale”—una linea retta che esce perpendicolare alla superficie del pacco. Parallelamente, il sistema usa i quattro angoli superiori del pacco nell’immagine per inferire il centro geometrico della sua proiezione, simile a trovare il centro dell’ombra di un rettangolo. Combinando l’orientamento del piano con questa posizione centrale si ottiene una precisa posizione di presa 3D e l’inclinazione della superficie superiore del pacco, che possono poi guidare la ventosa o la pinza del robot.
Gestire pacchi schiacciati e rigonfi
I pacchi reali non sono blocchi perfetti: le buste con bolle si abbassano, le sacche morbide rigonfiano e le scatole di cartone possono deformarsi sotto carico. Un’ipotesi di superficie piana semplice fallirebbe in questi casi. Per affrontare questo, gli autori estendono la loro formulazione matematica per distinguere tra tre situazioni: pacchi quasi piani, superfici superiori convesse (rigonfie) e superfici concave (abbassate). Confrontando i valori di profondità più alti e più bassi sulla superficie di un pacco, il sistema decide prima se è significativamente deformato. In tal caso, analizza come la superficie deformata interseca un piano di riferimento immaginato e adatta un’ellisse approssimativa a quell’intersezione. Da ciò risolve un piano “ottimale” che rappresenta al meglio una superficie di presa stabile—even se la parte superiore reale è affossata o rigonfia—and poi proietta il punto chiave di presa su quel piano.
Testare l’algoritmo
Per verificare la validità pratica della matematica, il team ha costruito una piattaforma di prova con un robot industriale a sei assi, una camera 3D e un dispositivo personalizzato a laser e sonda. Per prima cosa, hanno segnato il vero centro geometrico della superficie superiore di ciascun pacco di prova e hanno usato due fasci laser per individuare fisicamente quella posizione nello spazio. Successivamente, hanno lasciato che il loro algoritmo di visione calcolasse la propria stima dello stesso centro e hanno comandato al robot di muovere una seconda sonda verso quel punto calcolato. Misurando la piccola differenza tra le due punte della sonda, hanno potuto calcolare l’errore di posizionamento. Test con modelli rigidi in legno e materiali di imballaggio realistici—scatole ondulate, buste con bolle e sacche di plastica, in dimensioni fino a 250×250 mm—hanno mostrato un errore massimo di posizionamento di circa 1,7 millimetri e errori medi vicini a 1 millimetro per asse. Il calcolo completo per ogni pacco richiedeva circa 17,5 millisecondi, abbastanza rapido per linee di smistamento ad alto rendimento.
Cosa significa per i magazzini del futuro
In termini semplici, lo studio dimostra che un robot dotato di una camera 3D e di questo algoritmo basato su tre punti e proiezione può determinare in modo affidabile dove e come afferrare pacchi da un contenitore disordinato con precisione a livello di millimetro. Sebbene forti deformazioni in pacchi molto morbidi riducano ancora un po’ la precisione, il metodo rimane sufficientemente robusto per condizioni realistiche di magazzino. Con l’aumento continuo dei volumi di pacchi e la persistenza della carenza di manodopera, tali algoritmi potrebbero rendere il lavoro più sicuro e meno monotono spostando i compiti più gravosi e ripetitivi dalle persone alle macchine—aiutando nel contempo a mantenere fluido il mondo in crescita dell’e‑commerce.
Citazione: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Parole chiave: visione 3D, smistamento pacchi, presa robotica, automazione della logistica, localizzazione degli oggetti