Clear Sky Science · it
Soluzioni quadrato-integrabili e stabilità di un’equazione stocastica integro-differenziale del secondo ordine
Perché il passato e la casualità contano nei sistemi ingegneristici
Molti dispositivi moderni — dai bracci robotici flessibili ai ponti con smorzamento delle vibrazioni — non rispondono soltanto a ciò che accade nel presente. Il loro moto è modellato da movimenti passati, segnali sensoriali ritardati e dalle continue vibrazioni casuali dell’ambiente. Questo articolo pone una domanda fondamentale su tali sistemi: anche quando sono soggetti al rumore e conservano memoria del passato, è possibile garantire che i loro moti rimangano controllati invece di crescere senza limiti?
Un nuovo modo di seguire sistemi rumorosi con memoria
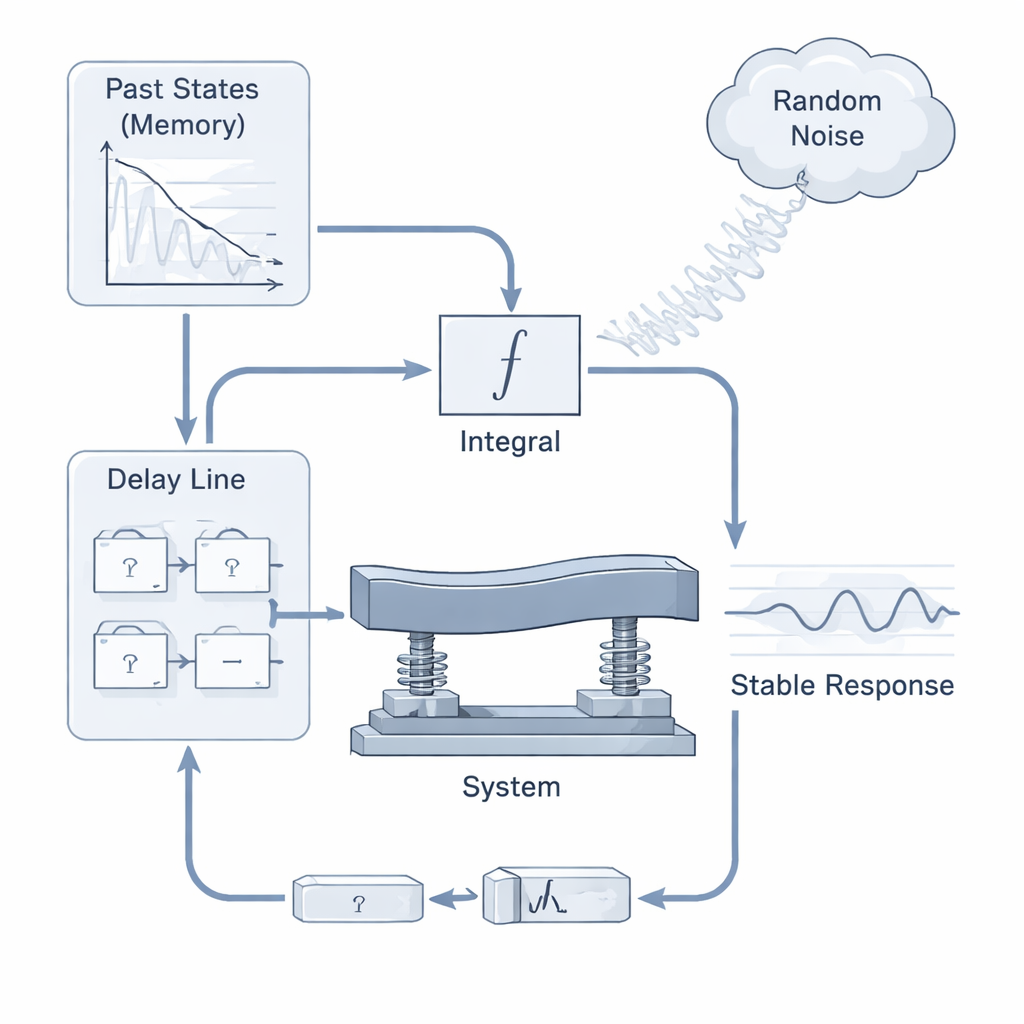
Gli autori studiano un’ampia famiglia di modelli matematici denominata equazioni stocastiche integro-differenziali del secondo ordine con ritardi. In termini semplici, queste equazioni descrivono come una quantità come lo spostamento varia quando dipende dalla posizione e dalla velocità correnti, dalla sua storia nel tempo, da feedback ritardato e da fluttuazioni casuali. Questo tipo di descrizione è naturale per materiali viscoelastici, assorbitori di vibrazione e sistemi meccanici o meccatronici con controllo in retroazione. Una difficoltà chiave è che gli strumenti tradizionali spesso trattano una sola complicazione alla volta — o la casualità, o i ritardi, o la memoria — ma non tutte e tre insieme. Qui gli autori progettano uno strumento analitico più potente, un funzionale di Lyapunov–Krasovskii, costruito con cura per catturare l’effetto combinato del rumore, dei ritardi temporali variabili e dei termini di memoria.
Mantenere il moto limitato nonostante ritardi e rumore
Utilizzando questo nuovo funzionale, l’articolo ricava condizioni sotto le quali i sistemi modellati si comportano bene nel lungo periodo. In particolare, gli autori dimostrano che, se si impongono certi limiti naturali sull’intensità del feedback, dello smorzamento e degli effetti di memoria, allora ogni soluzione rimane limitata nel tempo. Inoltre, lo stato del sistema tende a stabilizzarsi verso una posizione di riposo in senso stocastico: le perturbazioni casuali possono provocare oscillazioni a breve termine, ma queste non si accumulano in un moto incontrollato. Questa proprietà è chiamata stabilità asintotica stocastica. Le condizioni sono espresse mediante disuguaglianze semplici sui coefficienti che descrivono smorzamento, rigidezza, ampiezza del ritardo e intensità del rumore casuale. In linea di principio, gli ingegneri possono usare queste disuguaglianze come linee guida progettuali per garantire un funzionamento sicuro.
Moto quadrato-integrabile e controllo dell’energia
Oltre a mostrare che i moti restano limitati, gli autori dimostrano una proprietà più forte che coinvolge quella che chiamano quadrato-integrabilità. Tradotto in termini più familiari, ciò significa che se si guarda all’energia accumulata totale del sistema — ottenuta dal quadrato dello spostamento e dal quadrato della sua velocità — questa energia totale rimane finita per tutto il futuro del moto. Un’energia accumulata finita implica che, in media, le oscillazioni devono spegnersi invece di persistere indefinitamente. Dal punto di vista matematico, ciò viene stabilito mostrando che il funzionale di Lyapunov–Krasovskii diminuisce lungo le traiettorie del sistema abbastanza rapidamente da far convergere l’integrale del quadrato del moto. Questo risultato collega il funzionale astratto a una quantità fisicamente significativa simile all’energia.
Mettere la teoria alla prova con simulazioni
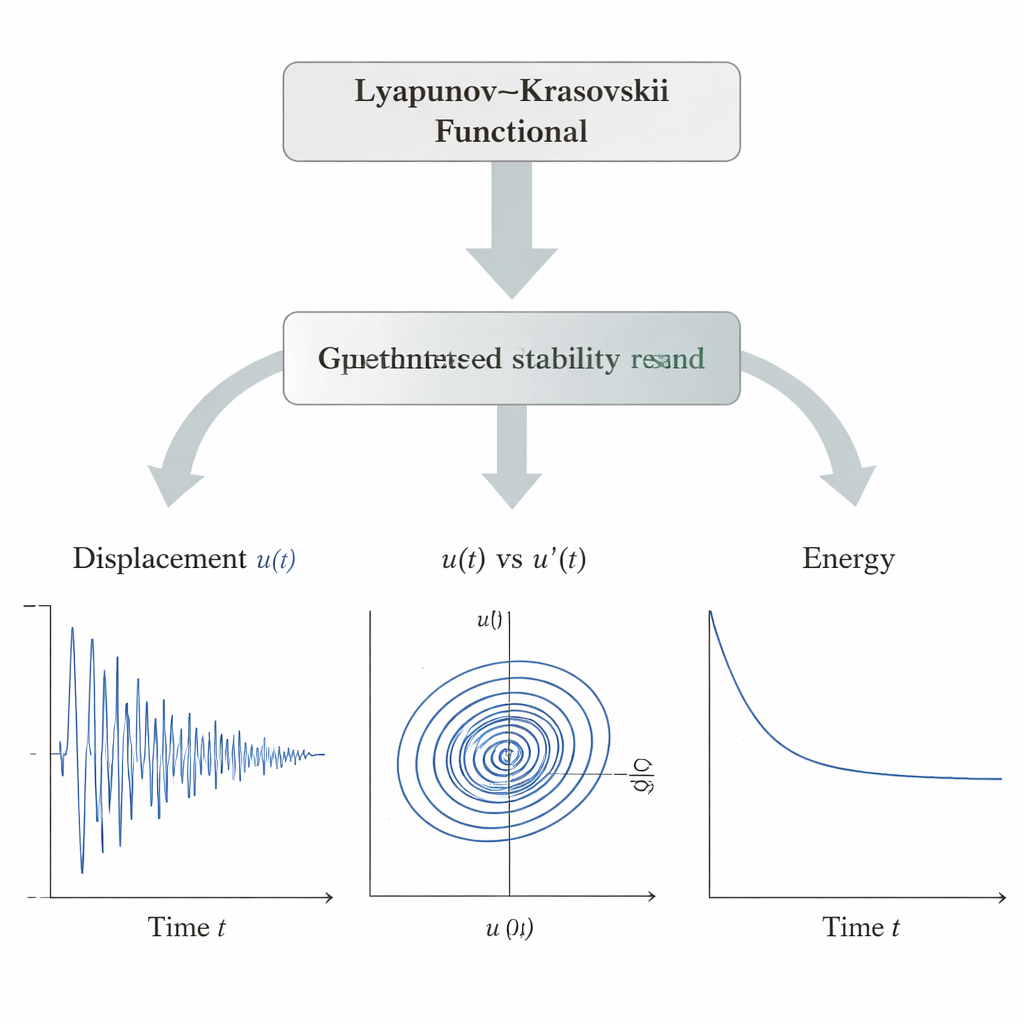
Per illustrare i risultati astratti, gli autori simulano due sistemi modello dettagliati che rientrano nel loro quadro generale. Usando una combinazione del metodo di Euler–Maruyama per la parte casuale e quadrature numeriche per gli integrali di memoria, generano traiettorie esemplificative nel tempo. Gli spostamenti simulati mostrano una fase transitoria iniziale con oscillazioni casuali evidenti, poi si stabilizzano in piccole fluttuazioni limitate attorno allo stato di riposo. I diagrammi di fase mostrano curve a spirale che rimangono confinate in una regione limitata e le curve dell’energia calcolata decrescono e restano limitate. Questi esperimenti numerici confermano che le condizioni teoriche di stabilità e di quadrato-integrabilità predicono effettivamente moti realistici e ben comportati, anche quando sono presenti ritardi e forze casuali.
Cosa significa per i sistemi del mondo reale
Per un lettore non specialistico, il messaggio principale è che l’articolo offre un modo rigoroso per certificare che sistemi complessi, con ritardi e rumorosi, non sfuggiranno al controllo. Costruendo un nuovo tipo di misura simile all’energia che tiene conto sia della memoria sia della casualità, gli autori mostrano quando le oscillazioni restano limitate e la loro energia complessiva rimane finita. Questo avanza le basi matematiche per la progettazione di dispositivi di controllo delle vibrazioni, strutture meccaniche flessibili e altre tecnologie in cui feedback ritardati e disturbi casuali sono inevitabili. Le stesse idee potrebbero informare lavori futuri in ambiti diversi come la regolazione biologica, la dinamica economica e il controllo in rete, ovunque il passato e il caso congiuntamente modellino l’evoluzione del sistema.
Citazione: Oudjedi-Damerdji, L.F., Meziane, M., Djidel, O. et al. Square integrable solutions and stability of a second-order stochastic integro-differential equation. Sci Rep 16, 7158 (2026). https://doi.org/10.1038/s41598-026-37970-5
Parole chiave: stabilità stocastica, equazioni differenziali a ritardo, metodi di Lyapunov, sistemi integro-differenziali, controllo delle vibrazioni