Clear Sky Science · it
Analisi riconfigurabile e ottimizzazione del posto di lavoro di un robot parallelo modulare sospeso a cavi
Robot che viaggiano su rotaie invisibili
Immaginate un robot che può far scorrere una pesante telecamera attraverso uno stadio, sollevare materiali edili su un cantiere o guidare un dispositivo riabilitativo intorno a un paziente, il tutto sospeso a cavi anziché montato su bracci rigidi. Questo articolo presenta un nuovo tipo di robot sospeso a cavi la cui struttura può essere rimodellata su richiesta, permettendo a una sola macchina di adattarsi a molteplici compiti sfruttando al massimo i movimenti utili nel suo spazio operativo.
Costruire un robot da pezzi intercambiabili
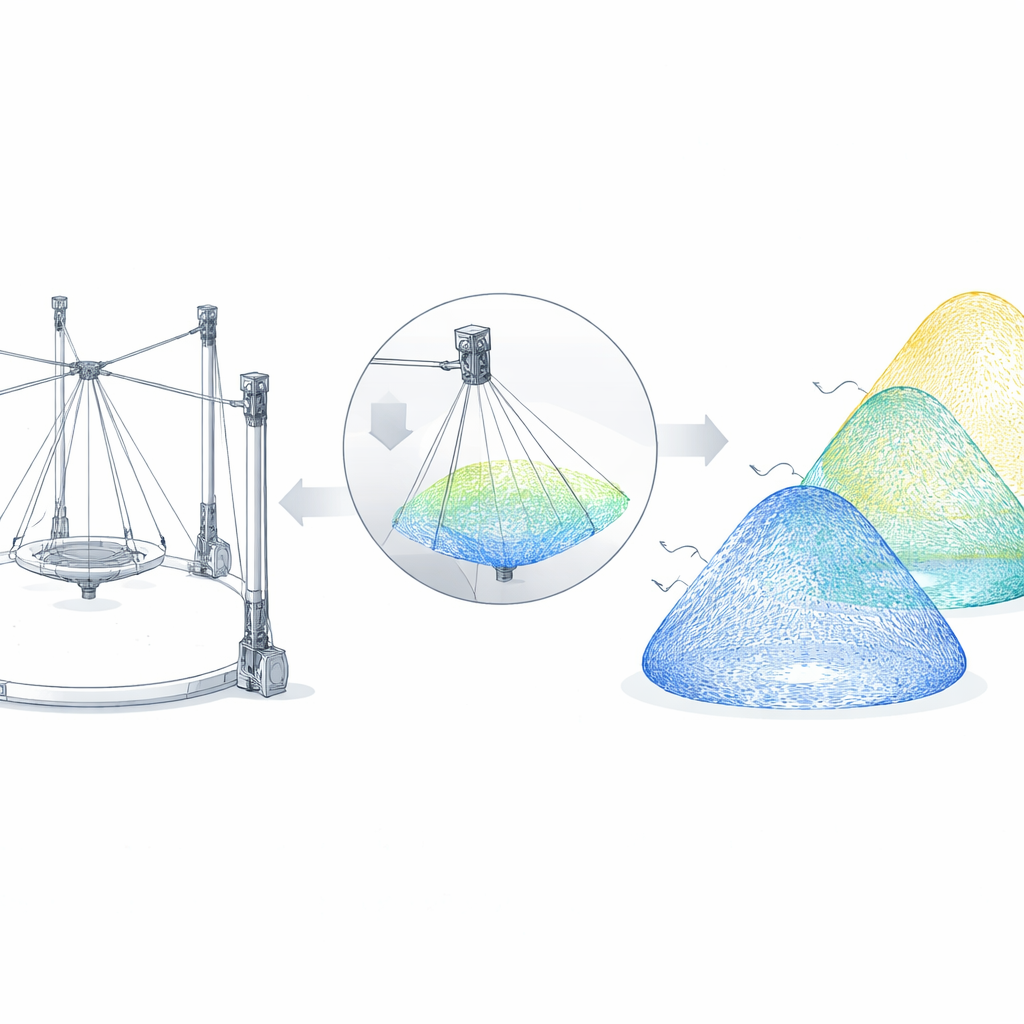
Al centro dello studio c’è un robot parallelo modulare sospeso a cavi (MCSPR). Invece di bracci metallici fissi, utilizza fino a sei “rami” identici, ciascuno una torre con motori, pulegge e un cavo che si collega a una piattaforma centrale mobile, chiamata end‑effector. Questi rami sono posizionati lungo una guida circolare e possono essere aggiunti, rimossi, ruotati o alzati e abbassati. Riorganizzandoli, lo stesso hardware può comportarsi come diversi robot: con due rami si muove su un piano, con tre o quattro si muove liberamente nello spazio e con cinque o sei può anche inclinare e ruotare la piattaforma in più direzioni.

Pianificare lo scheletro di una macchina che cambia forma
Progettare un sistema così flessibile non significa solo avvitare parti insieme. Gli autori adottano un approccio sistematico di “sintesi strutturale”, trattando ogni cavo, puleggia e giunto come un blocco costruttivo base all’interno di una rete. Con diagrammi simili a grafi, mappano come questi elementi si connettono affinché la piattaforma finale abbia le libertà di movimento desiderate — come traslare lungo tre assi o ruotare attorno a essi. Questo catalogo di moduli e connessioni funge da kit di progettazione: a seconda del movimento richiesto da un compito, un progettista può scegliere quanti rami usare e dove posizionarli sulla guida circolare, con la certezza che la struttura risultante si comporterà come previsto.
Capire in quale direzione si muoverà la piattaforma
Poiché la piattaforma è sospesa da cavi che possono solamente tirare e non spingere, prevederne il movimento è più complesso rispetto ai robot tradizionali. Il team sviluppa una descrizione matematica unificata che funziona per tutte e cinque le principali configurazioni dell’MCSPR. Dato un desiderato posizione e orientamento della piattaforma, calcolano esattamente quanto devono essere lunghi i singoli cavi e quanto velocemente deve cambiare la loro lunghezza. Costruiscono quindi un prototipo fisico e comandano la piattaforma a tracciare un percorso a spirale regolare nello spazio. Sensori lungo i cavi registrano i movimenti reali, che corrispondono da vicino a quelli previsti. Questo conferma che il modello può dirigere il robot in modo affidabile anche quando la sua geometria viene riconfigurata.
Trovare dove il robot può rimanere fermo in sicurezza
Ugualmente importante è comprendere dove la piattaforma sospesa può rimanere in equilibrio. Se un qualsiasi cavo si allenta, si perde il controllo. Gli autori si concentrano su ciò che chiamano spazio di lavoro di equilibrio statico: la regione dello spazio in cui tutti i cavi possono mantenere una tensione positiva mentre sull’end‑effector agisce solo la gravità. Usando un approccio Monte Carlo, campionano casualmente molte possibili posizioni e orientamenti della piattaforma e verificano, per ognuno, se le tensioni dei cavi necessarie a mantenere quella posa rientrano nei limiti di sicurezza. I campioni accettati formano una nube tridimensionale che delinea il volume operativo disponibile al robot.
Estendere la portata del robot con una messa a punto intelligente
Poiché i rami dell’MCSPR possono variare in altezza e angolazione, e la piattaforma può trasportare carichi di masse e angoli di inclinazione diversi, la dimensione e la forma di questo volume sicuro non sono fisse. I ricercatori variano sistematicamente questi fattori in una configurazione a sei rami. Dimostrano che un carico più pesante riduce drasticamente la regione in cui il robot può rimanere fermo, mentre scelte intelligenti delle altezze dei rami e della spaziatura angolare possono ampliarla. Poi formulano un problema di ottimizzazione: regolare il carico, le altezze dei rami, gli angoli dei rami e l’intervallo di inclinazione della piattaforma per massimizzare il volume dello spazio di lavoro sicuro. Eseguendo questa ricerca al computer, trovano una configurazione in cui lo spazio raggiungibile ed equilibrato è più volte superiore rispetto a una disposizione ingenua.
Perché questo conta per i lavori del mondo reale
Per un non specialista, il messaggio chiave è che questo robot può essere rimodellato quasi come un kit di costruzione, pur potendo essere analizzato e ottimizzato con precisione. Combinando hardware modulare con pianificazione matematica accurata e ricerche basate su computer, gli autori trasformano una singola macchina sospesa a cavi in una piattaforma versatile adattabile a molti compiti — dalla produzione di precisione alla riabilitazione — sfruttando al meglio il suo spazio operativo e mantenendo i carichi sostenuti in sicurezza.
Citazione: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Parole chiave: robot a cavi, robotica modulare, meccanismi riconfigurabili, spazio di lavoro del robot, manipolatori paralleli