Clear Sky Science · it
Rilevamento basato su MLS e estrazione dei parametri di ancoraggi/cavi di copertura delle gallerie da nuvole di punti 3D
Mantenere sicure le gallerie minerarie
Le miniere di carbone profonde si affidano a bulloni metallici e cavi infissi nella volta della galleria per impedire il cedimento della roccia. Se questi supporti sono mal posizionati o cominciano a guastarsi, la vita dei lavoratori è in pericolo. Eppure oggi il controllo di migliaia di ancoraggi è ancora in gran parte manuale, eseguito con metro e calibri, in gallerie buie e polverose. Questo studio introduce un metodo automatizzato per “vedere” e misurare quelle linee di vita nascoste usando scanner laser mobili e dati 3D, promettendo controlli di sicurezza più rapidi e oggettivi per le miniere moderne.
Scansionare una galleria in tre dimensioni
I ricercatori hanno costruito un sistema portatile di scansione laser mobile progettato specificamente per le carreggiate sotterranee. Dotato di un telemetro laser e sensori di movimento, il dispositivo viene trasportato o spinto lungo la galleria, sparando rapidamente impulsi laser verso la roccia circostante. Mentre si muove, una tecnica di navigazione chiamata SLAM (Localizzazione e Mappatura Simultanee) unisce le misure in arrivo in un modello 3D continuo della galleria. Anche senza segnali GPS, che non raggiungono il sottosuolo, il sistema può ricostruire la forma di un tratto di carreggiata di 50 metri con precisione a livello di centimetro, catturando non solo le superfici rocciose ma anche gli elementi di sostegno come bulloni, cavi e piastre d’acciaio.
Pulire la galleria digitale
Le scansioni 3D grezze di una miniera sono disordinate. Polvere, nebulizzazione d’acqua, lavoratori e macchinari generano punti estranei che affollano i dati. Il team applica innanzitutto un processo di denoising in due fasi che rimuove gli outlier evidenti recuperando nel contempo le superfici reali che potrebbero essere state scartate per errore. Isolano quindi solo la volta della galleria, poiché è lì che sono ancorati bulloni e cavi di sostegno. Ruotando matematicamente i dati, allineano la volta in modo che giaccia appiattita in un’orientazione standard, rendendo più semplice ragionare su “alto” e “basso” e misurare la direzione e la lunghezza di ciascun elemento di sostegno in modo coerente sull’intera scena.
Lasciare che un telo virtuale trovi i bulloni
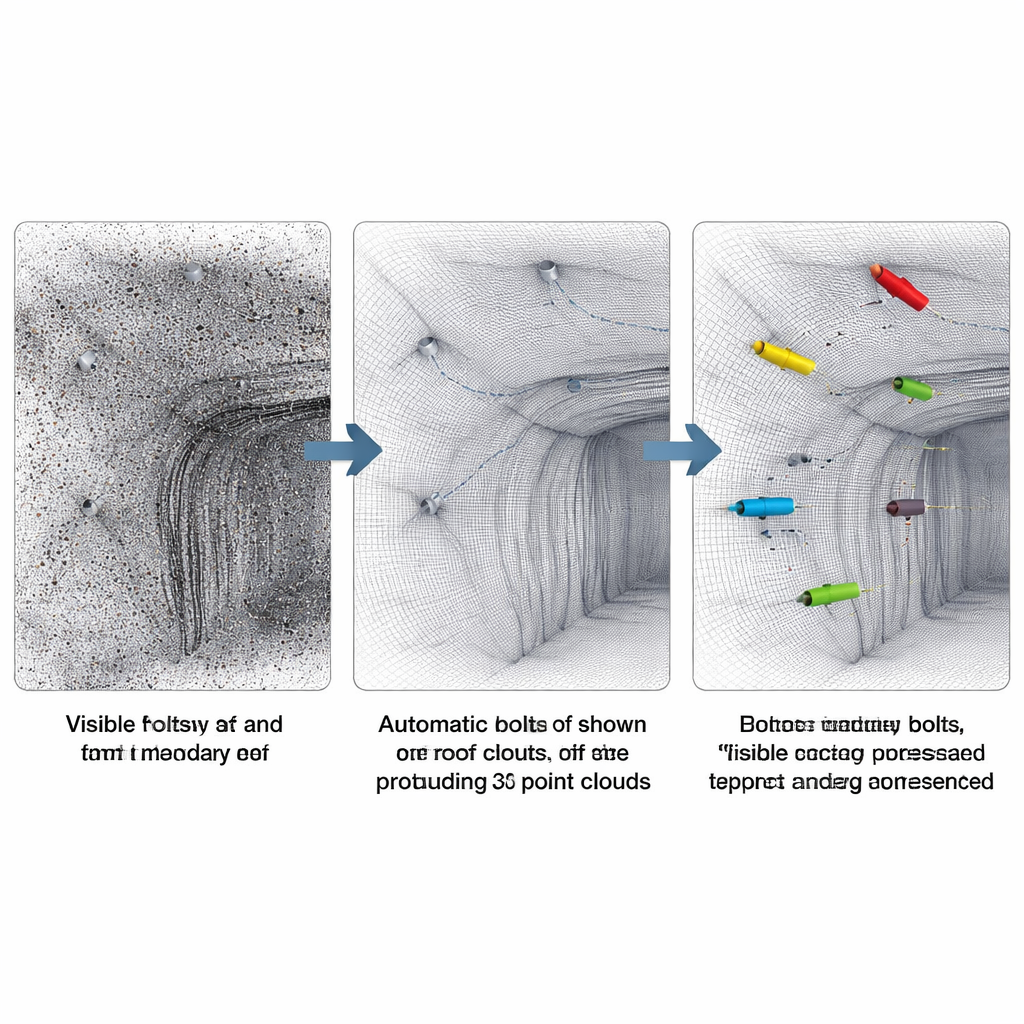
Per separare la superficie della volta dagli elementi fissati ad essa, i ricercatori usano un espediente noto come Cloth Simulation Filter. Immaginano un foglio flessibile che si posa lentamente, sotto gravità, sulla volta digitale capovolta. Dove c’è la roccia reale, il telo aderisce alla superficie. Dove sporge un bullone, un cavo o una piastra, il telo si drappeggia sopra lasciando una cavità. Misurando la piccola differenza di altezza tra il telo e i punti reali, l’algoritmo etichetta quali punti appartengono alla superficie liscia della volta e quali sono probabilmente oggetti sporgenti. Impostazioni calibrate con cura assicurano che il telo sia sufficientemente dettagliato da seguire le asperità naturali della volta, ma non così fine da “inghiottire” i bulloni che dovrebbe mettere in evidenza.
Addestrare il computer a conteggiare e misurare i supporti
Una volta isolate le potenziali sporgenze, il metodo deve ancora decidere quali ammassi di punti sono davvero bulloni o cavi e quali sono tubazioni, fili sospesi o rumore. Qui una tecnica di clustering basata sulla densità raggruppa i punti vicini che formano forme allungate. L’algoritmo adatta il raggio di ricerca e la dimensione minima del cluster in modo che ogni bullone diventi tipicamente un gruppo pulito, senza fondere elementi vicini. Per ogni gruppo, un’analisi geometrica semplice trova l’asse principale dell’oggetto e proietta tutti i punti su di esso, fornendo una stima della lunghezza esposta e dell’angolo di inclinazione. Regole aggiuntive basate sul progetto tipico della miniera — come spaziatura prevista, diametro atteso e angolo di installazione ammissibile — aiutano a filtrare i falsi positivi e a lasciare solo i veri supporti correttamente installati.
Dalle mappe 3D a intuizioni pratiche per la sicurezza
Il metodo è stato testato in una miniera di carbone profonda nella Mongolia Interna, su cinque segmenti consecutivi di volta contenenti 127 bulloni e cavi etichettati manualmente con cura. Il sistema automatizzato ne ha individuati correttamente 118, con solo pochi mancati rilevamenti e falsi allarmi, anche in condizioni difficili con polvere, copertura parziale in spritz beton e parti metalliche interferenti. Altrettanto importante, ha prodotto un database strutturato per ciascun elemento di sostegno: la sua posizione esatta, la spaziatura, la lunghezza sporgente dalla volta e l’angolo rispetto alla roccia. Per gli ingegneri minerari, questo trasforma una complessa nuvola di punti 3D in un elenco di controllo pronto all’uso per il controllo qualità e il monitoraggio a lungo termine. Sebbene l’approccio dipenda ancora dall’ottenere dati di scansione di buona qualità e dall’avere almeno una parte visibile di ogni bullone, indica una direzione in cui i controlli di sicurezza di routine delle gallerie possono diventare più rapidi, più frequenti e meno dipendenti dal giudizio soggettivo umano.
Citazione: Ren, Z., Zhu, H., Zhao, L. et al. MLS-based recognition and parameter extraction of roadway roof bolts/cables from 3D point clouds. Sci Rep 16, 6538 (2026). https://doi.org/10.1038/s41598-026-37689-3
Parole chiave: scansione laser mobile, nuvole di punti 3D, ispezione di ancoraggi rocciosi, sicurezza nelle miniere sotterranee, monitoraggio del supporto di gallerie