Clear Sky Science · it
Pianificazione del percorso consapevole della qualità dinamica per bracci robotici a 6 DoF usando BiRRT e ottimizzazione metaeuristica basata su percorsi B-spline
Robot che si muovono in modo fluido e sicuro
I robot industriali oggi condividono spazi di lavoro affollati con persone, utensili e sistemi di trasporto. In questi spazi ristretti un braccio robotico non può limitarsi a spostarsi dal punto A al punto B; deve farlo senza collisioni, con basso consumo energetico e senza vibrazioni che possano danneggiare sé stesso o le attrezzature vicine. Questo articolo descrive un metodo pratico per pianificare movimenti accurati per un comune braccio industriale a sei giunti, trasformando percorsi grezzi trovati al computer in movimenti soft e consapevoli dell’energia che possono essere eseguiti in sicurezza su hardware di fabbrica reale.
Perché pianificare un semplice raggiungimento è sorprendentemente difficile
Quando un braccio robotico si muove, bisogna bilanciare molte esigenze contemporaneamente. Il percorso dovrebbe essere breve per completare i compiti rapidamente, il consumo energetico dovrebbe essere contenuto per limitare calore e usura, e il movimento dovrebbe essere abbastanza dolce da evitare strappi o vibrazioni. Gli approcci classici tracciano curve matematiche lisce (come le spline) attraverso pochi waypoint scelti a mano, il che funziona bene in spazi aperti ma può diventare inefficiente o persino pericoloso in celle ingombre. I metodi di sampling più recenti, come gli alberi di esplorazione casuale (RRT), sono bravi a districarsi in campi di ostacoli complessi ma tendono a produrre percorsi con angoli netti che stressano motori e ingranaggi. Gli autori sostengono che nessuna delle due famiglie è sufficiente da sola; invece le combinano in un framework a due fasi.
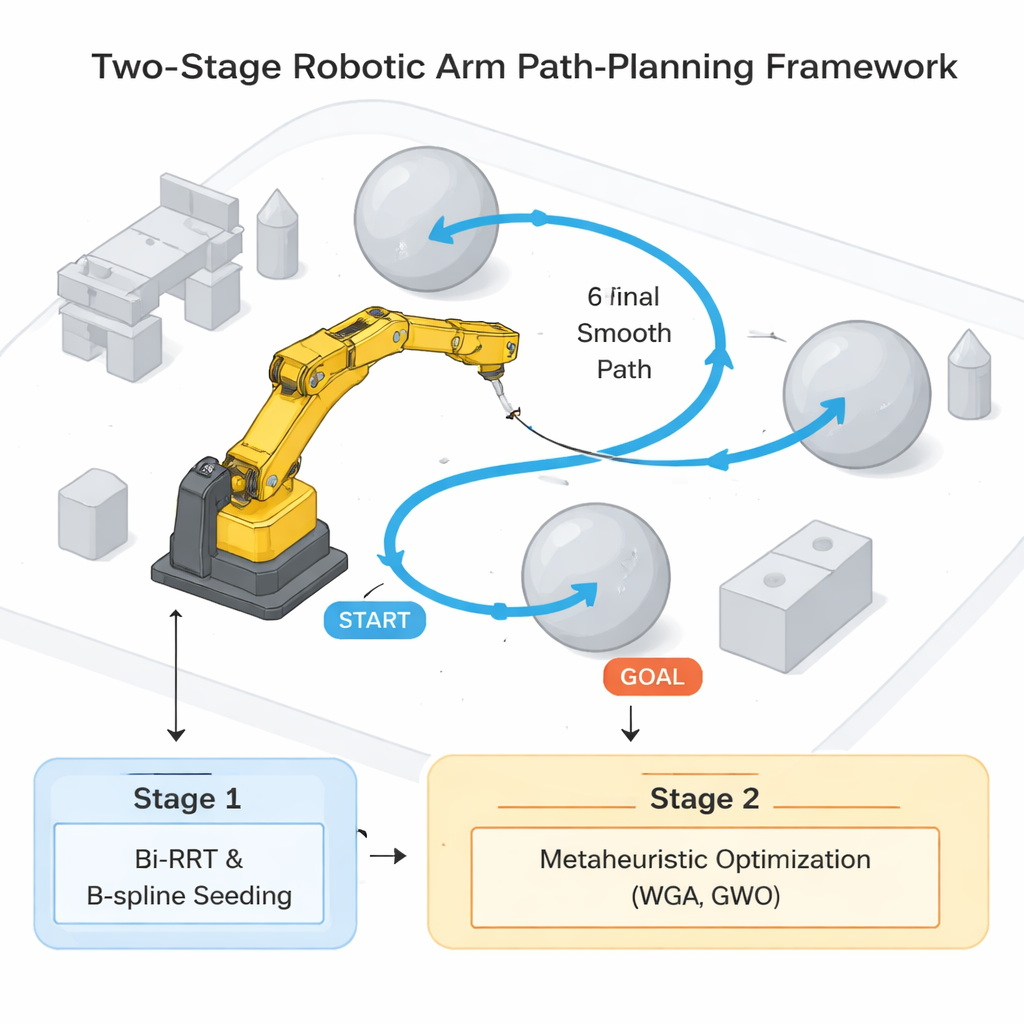
Una roadmap in due fasi per il movimento robotico
Nella prima fase, il team costruisce una “rotta di riferimento” sicura nello spazio delle giunte del robot invece che limitarsi alla posizione dell’effettore. Partono da una curva B-spline liscia che collega posizione iniziale e finale evitando sfere ostacolo con un margine di sicurezza. Questa curva guida poi un pianificatore Bi-RRT (RRT bidirezionale) che fa crescere due alberi casuali—dalla partenza e dall’arrivo—fino a farli incontrare in un percorso senza collisioni. Lungo il percorso, ogni moto tentativo dell’intero braccio viene verificato rispetto a forme di ostacolo semplificate. Una volta trovato il percorso, le pieghe ridondanti vengono eliminate con tecniche di “short-cutting” e il risultato viene riformulato come spline parametrizzata nel tempo che il robot, in linea di principio, potrebbe seguire.
Insegnare al robot a muoversi più dolcemente
La seconda fase prende questo percorso fattibile ma imperfetto e lo affina in termini di qualità. Qui gli autori utilizzano due metodi d’ottimizzazione ispirati alla natura: un algoritmo ibrido Whale–Genetic (WGA) e il Grey Wolf Optimizer (GWO). Entrambi agiscono su un insieme limitato di punti di controllo e parametri temporali lungo la spline originale, ma possono muovere questi punti solo all’interno di corridoi sicuri precomputati attorno al percorso. Ogni moto candidato viene valutato tramite una misura combinata che fonde tre ingredienti: quanto si sposta l’effettore, quanta energia a livello di giunto viene consumata (basata sulle caratteristiche di ciascun motore) e quanto è “scattante” il moto—cioè quanto rapidamente cambiano le accelerazioni dei giunti nel tempo. Proponendo, testando e migliorando ripetutamente percorsi candidati, questi ottimizzatori cercano movimenti che restino privi di collisioni ma molto più fluidi e pronti per l’esecuzione.
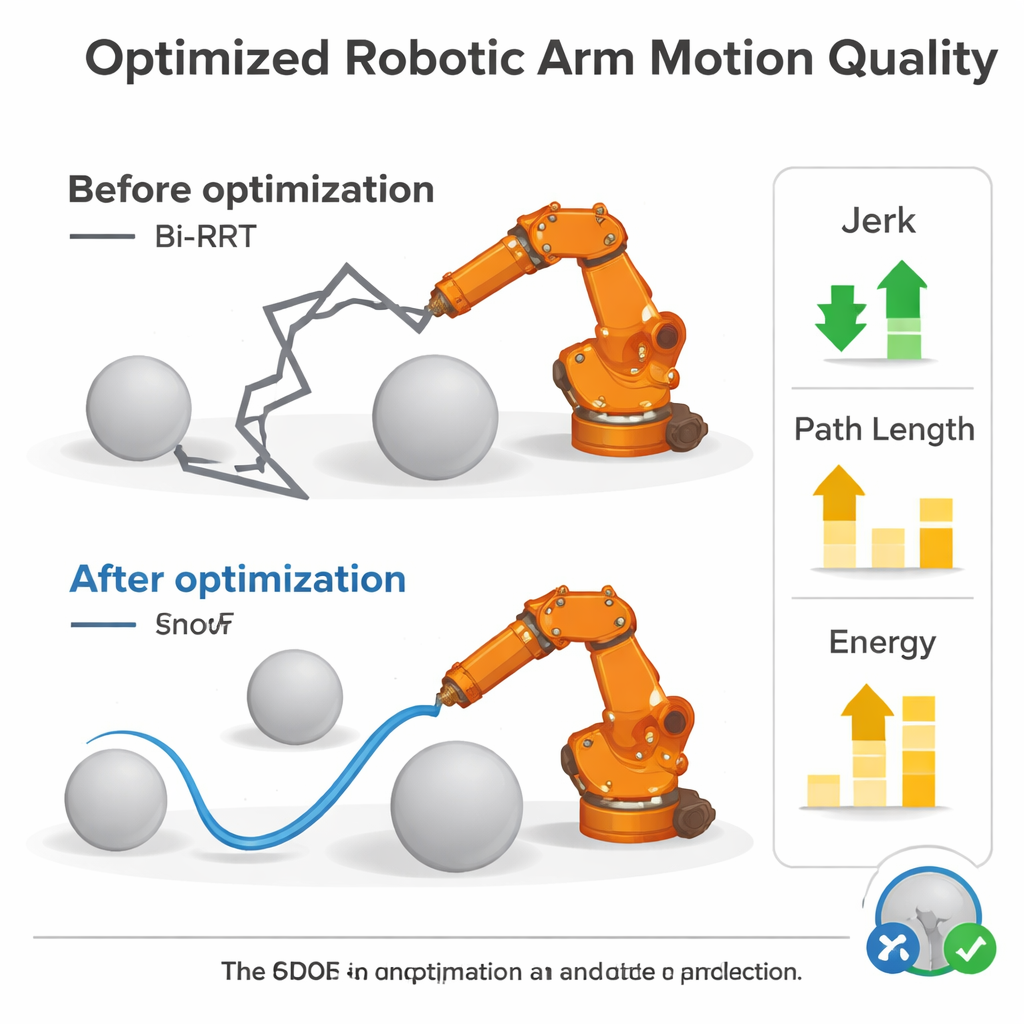
Cosa rivelano le simulazioni
Gli autori testano la loro pipeline su un modello digitale di un braccio industriale ampiamente usato, il KUKA KR 4 R600, muovendolo in una scena con tre ostacoli su uno spostamento fisso di due secondi. Una soluzione puramente basata su spline è già ragionevolmente fluida ma non sfrutta sistematicamente tutte le rotte sicure possibili. Un Bi-RRT con short-cutting trova un percorso di lunghezza geometrica simile e con un consumo energetico anche inferiore, ma con un grande svantaggio: il suo indice di jerk—un indicatore di quanto bruscamente cambiano le accelerazioni dei giunti—è circa dieci volte superiore, segnalando un moto che probabilmente ecciterebbe vibrazioni e sollecitazioni in una macchina reale. Dopo l’applicazione di WGA o GWO, il jerk viene ridotto di circa il 94–96 percento rispetto a questo percorso Bi-RRT grezzo. Questa levigatura drammatica comporta solo aumenti modesti nella distanza di percorrenza (circa il 15–17 percento) e nell’energia (circa un fattore due), un compromesso che gli autori ritengono ben giustificato per apparecchiature reali.
Dalla teoria al piano di produzione
Per un non specialista, il risultato principale è che gli autori forniscono una ricetta concreta—e strumenti basati su MATLAB—per trasformare la prima idea grezza di un robot su come muoversi in un movimento raffinato e compatibile con l’hardware. Il loro approccio garantisce prima che esista un percorso attraverso un ambiente ingombro, poi rimodella quel percorso in modo che il braccio si muova con meno scossoni pur rispettando limiti delle giunte e distanze di sicurezza. Il risultato finale è una famiglia di movimenti che un robot industriale reale può eseguire in modo più sicuro e affidabile, ponendo le basi per estensioni future in cui i robot condividono spazi di lavoro con gli esseri umani e adattano i loro movimenti in tempo reale usando telecamere e persino interfacce basate su segnali cerebrali.
Citazione: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Parole chiave: pianificazione del percorso del robot, braccio robotico industriale, evitamento delle collisioni, morbidezza del movimento, ottimizzazione metaeuristica