Clear Sky Science · it
Scalatura sicura della formazione e pianificazione del moto per team eterogenei UAV–UGV in ambienti affollati
Robot che collaborano in aria e a terra
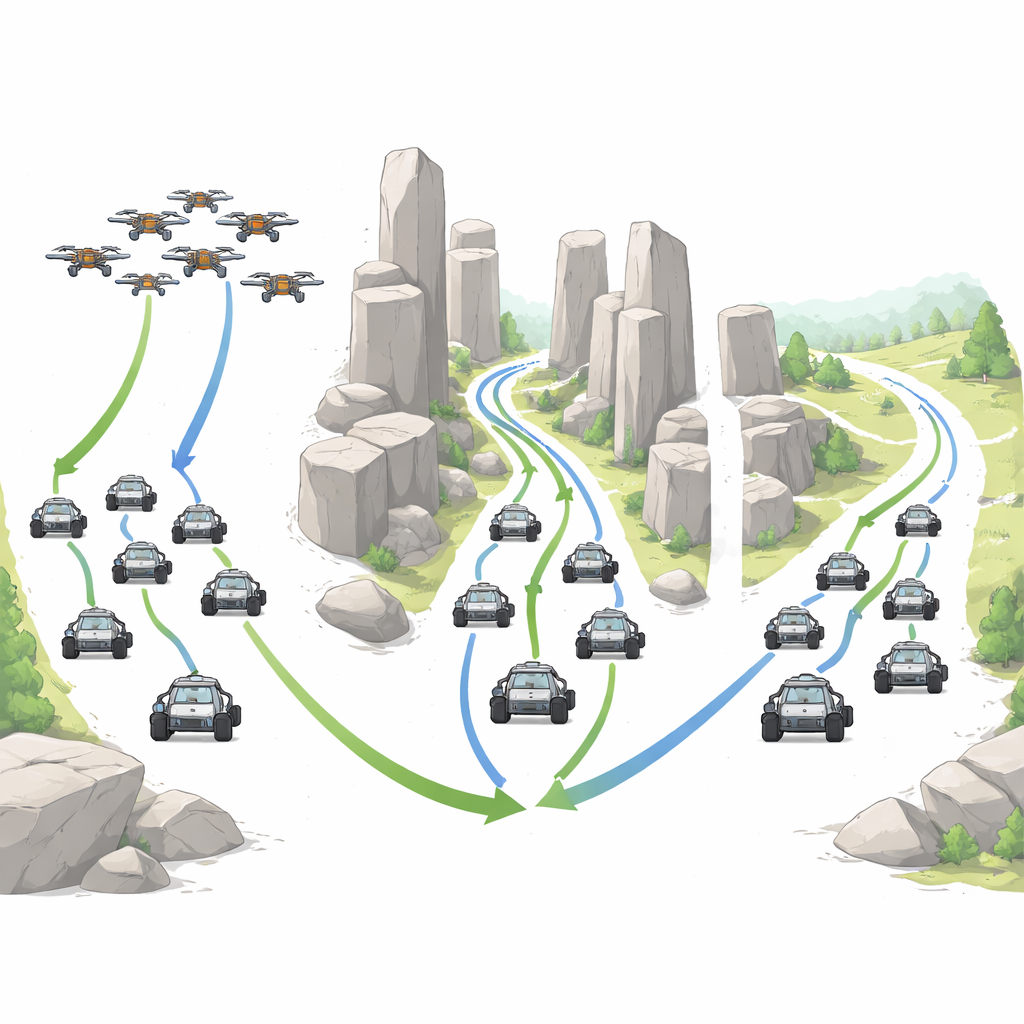
Immaginate uno sciame di piccoli droni che sorvolano una zona di disastro mentre robusti veicoli terrestri si fanno strada tra le macerie sottostanti, tutti in movimento come un'unica squadra coordinata. Questo articolo esplora come mantenere insieme tali gruppi misti di robot in spazi stretti e ricchi di ostacoli senza collisioni o ricalcoli frenetici dei percorsi. Gli autori propongono un nuovo modo per fare in modo che robot aerei e terrestri condividano una formazione stabile, si infilino attraverso fessure strette e arrivino comunque rapidamente e in sicurezza al loro obiettivo.
Perché è difficile coordinare team robotici misti
I droni volanti e i veicoli terrestri a ruote si comportano in modo molto diverso. I droni si muovono nello spazio tridimensionale e sono facilmente deviati dal vento. I veicoli terrestri devono rispettare limiti di sterzata e affrontare terreni accidentati. Eppure molte missioni reali — dal soccorso alla verifica delle infrastrutture — trarrebbero vantaggio se questi robot potessero viaggiare insieme come un unico gruppo tridimensionale. I metodi esistenti spesso trattano il mantenimento della formazione e l'evitamento degli ostacoli come problemi separati. Quando l'ambiente diventa affollato, le formazioni tendono a disgregarsi e poi a ricomporsi, sprecando tempo e aumentando il rischio di collisioni.
Un nuovo modo per mantenere il gruppo compatto
Per affrontare il problema, gli autori progettano un quadro che chiamano RG–ASAPF, che accoppia strettamente la forma del gruppo e il suo movimento. Al centro c'è una descrizione matematica della formazione come struttura “rigida”: le distanze desiderate tra i robot sono scelte in modo che la forma complessiva sia determinata univocamente, come le aste di un'impalcatura 3D stabile. Ogni robot utilizza quindi una regola condivisa per aggiustare il proprio moto in modo che tali distanze vengano ripristinate e mantenute, anche durante spostamenti e rotazioni della formazione. Questa regola è pensata per funzionare sia per robot volanti sia per robot terrestri e si adatta online alle incertezze, come attriti non modellati o piccole spinte esterne.
Lasciare che la formazione si assesti nei passaggi stretti
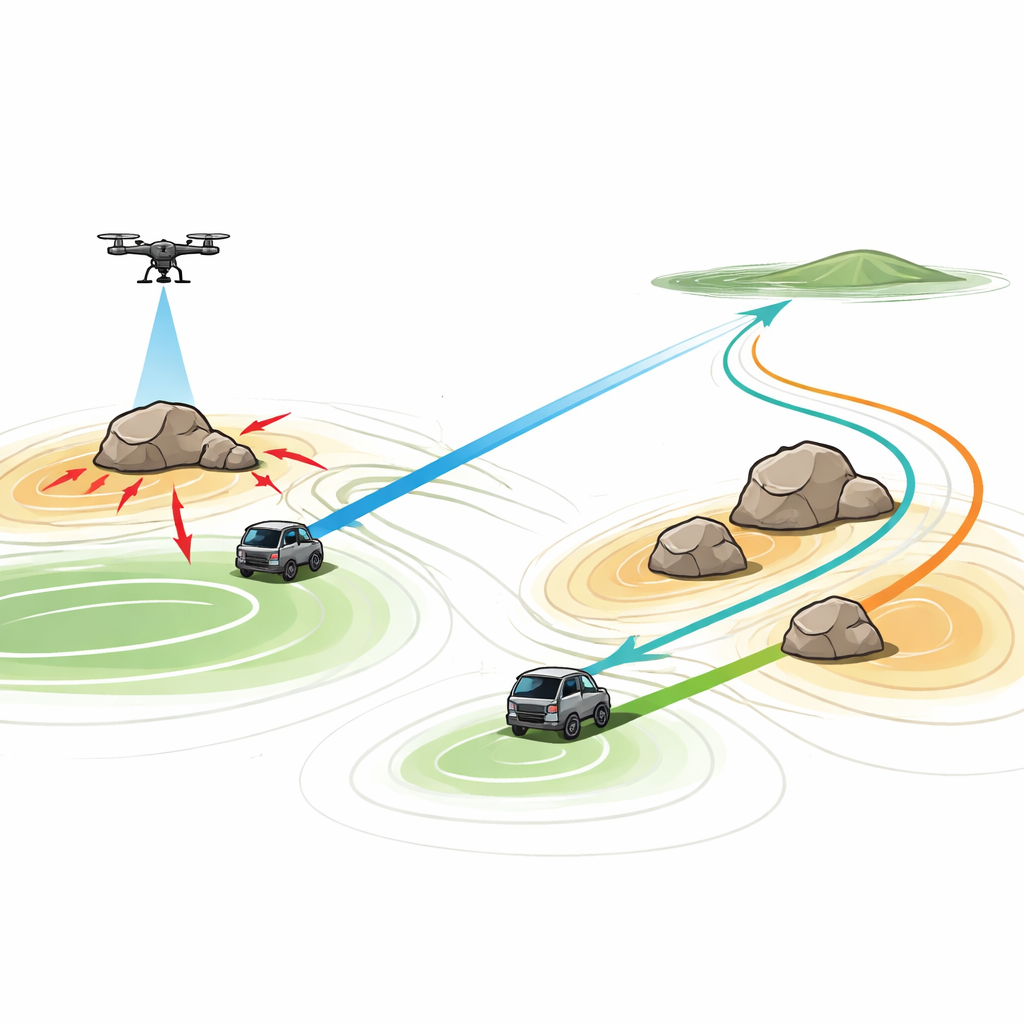
Gli ambienti reali raramente sono campi aperti; sono pieni di edifici, alberi, veicoli e oggetti in movimento. Una formazione sicura in spazio aperto può essere troppo grande per passare attraverso un vicolo stretto o un denso ammasso di ostacoli. Il metodo proposto consente alla formazione di scalare in modo fluido — restringendo o espandendo la sua dimensione complessiva — preservandone la struttura di base. Il team introduce un veicolo terrestre leader che pianifica il percorso usando un campo di potenziale artificiale, dove l'obiettivo agisce come un attrattore e gli ostacoli respingono la formazione. A differenza dei campi di potenziale tradizionali, che possono restare bloccati in vicoli ciechi o provocare movimenti nervosi, la loro versione “adattiva e sicura” regola continuamente l'intensità con cui gli ostacoli respingono i robot, in modo che mantengano una distanza di sicurezza senza diventare eccessivamente cauti o intrappolati.
Percorsi più intelligenti attraverso l'ingombro e il movimento
Il campo di potenziale è ulteriormente raffinato in modo che il “paesaggio” complessivo di attrazione e repulsione abbia sempre il suo punto più basso nell'obiettivo. Questo aiuta a evitare che la formazione rimanga bloccata in posizioni scomode tra gli ostacoli. L'intensità dell'effetto repulsivo viene regolata al volo usando una semplice regola di apprendimento presa in prestito dall'addestramento dei primi reti neurali. Quando i robot si avvicinano troppo agli ostacoli, la repulsione cresce automaticamente; quando c'è ampio spazio, si attenua. Se l'ambiente diventa così stretto che anche una formazione ridimensionata non può passare in sicurezza, il metodo attiva un piano di riserva: il team si ferma brevemente, espande idealmente un corridoio di sicurezza e ripianifica una rotta più sicura attorno all'area problematica prima di proseguire.
Test in mondi virtuali
Per valutare l'efficacia del metodo, gli autori eseguono estese simulazioni al computer con team misti di droni e veicoli terrestri. Testano aree aperte con pochi ostacoli, labirinti densi con molte barriere, scene con ostacoli in movimento e formazioni che devono trasformarsi in forme 3D più complesse come un prisma esagonale. In tutti questi casi, la formazione rimane coesa in tre dimensioni, evita in sicurezza ostacoli statici e mobili e adegua le proprie dimensioni quando necessario. I robot seguono percorsi fluidi ed efficienti anziché zigzagare attorno agli ostacoli. Se confrontato con diversi metodi di pianificazione popolari — inclusi campi di potenziale classici e migliorati, ottimizzazione a sciame di particelle e controllo predittivo del modello lineare e non lineare — il nuovo approccio trova percorsi che sono tipicamente più brevi, più fluidi e meno dispendiosi in termini energetici, calcolandoli inoltre più rapidamente rispetto a tecniche pesanti basate sull'ottimizzazione.
Cosa significa per le missioni nel mondo reale
Per un non-specialista, il messaggio chiave è che l'articolo mostra come far muovere team misti di robot volanti e terrestri come un unico corpo flessibile attraverso spazi tridimensionali affollati. Invece di spezzarsi ogni volta che compaiono ostacoli, il gruppo può piegarsi, restringersi e riorientarsi rimanendo coerente e sicuro. Questo potrebbe tradursi in supporto robotico più rapido e affidabile durante disastri, ispezioni industriali e pattugliamenti di sicurezza. Sebbene il lavoro attuale sia dimostrato in simulazioni e si basi su un veicolo leader designato, gli autori delineano passi futuri verso team più tolleranti ai guasti e esperimenti nel mondo reale, avvicinando la visione di sciami robotici coordinati aria–terra a un'applicazione pratica.
Citazione: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Parole chiave: formazione multi-robot, cooperazione UAV UGV, evitamento ostacoli, pianificazione del moto, robotica a sciame