Clear Sky Science · it
Un esoscheletro per teleoperazione degli arti superiori con parametrizzazione continua della lunghezza del braccio e fusione adattiva dell’impedenza attivata dalla forza
Lavoro manuale più sicuro a distanza
Molti dei lavori più pericolosi sulla Terra — e nello spazio — richiedono ancora giudizio umano e destrezza. Pensate alla riparazione di un impianto nucleare danneggiato, alla gestione di esplosivi o alla stabilizzazione di un veicolo spaziale. Questo studio presenta un nuovo tipo di esoscheletro motorizzato per l’arto superiore che permette a una persona di controllare un braccio robotico distante come se fosse il proprio, restando però lontano dal pericolo. Il dispositivo si concentra sul far muovere e “sentire” il robot come un’estensione naturale del corpo dell’utilizzatore, adattandosi al contempo a diverse lunghezze del braccio e a forze ambientali variabili.
Perché i bracci remoti sono importanti
I robot già operano sott’acqua, nelle zone colpite da calamità e all’interno di reattori, ma la maggior parte è o preprogrammata o guidata con joystick semplici. Questo limita le azioni possibili quando le condizioni cambiano improvvisamente. I sistemi di teleoperazione — in cui una persona controlla in tempo reale un robot remoto — offrono una via di mezzo, unendo il processo decisionale umano alla forza e alla portata robotica. I sistemi precedenti potevano spostare strumenti, ma spesso mancavano di feedback di forza preciso e non si adattavano facilmente ai corpi dei diversi utenti. Il risultato era un movimento goffo, una scarsa “sensazione” e uno sforzo maggiore sia per l’operatore sia per la macchina.
Un braccio robotico indossabile che si adatta davvero
Il team ha costruito un esoscheletro indossabile per l’arto superiore con sette giunti motorizzati allineati con spalla, gomito e polso. Materiali leggeri come fibra di carbonio e alluminio mantengono il dispositivo reattivo invece che pesante e lento. Un’innovazione importante è che la lunghezza del braccio superiore e dell’avambraccio dell’esoscheletro può essere regolata in modo continuo, non solo in pochi passi fissi. Guide scorrevoli con sensori elettrici integrati misurano continuamente la lunghezza reale del braccio dell’utilizzatore e inviano queste informazioni a un modello corporeo digitale. Di conseguenza, il dispositivo rimodella automaticamente la propria geometria interna per ciascuna persona, migliorando il comfort e rendendo i movimenti del robot più fedeli alle intenzioni umane. 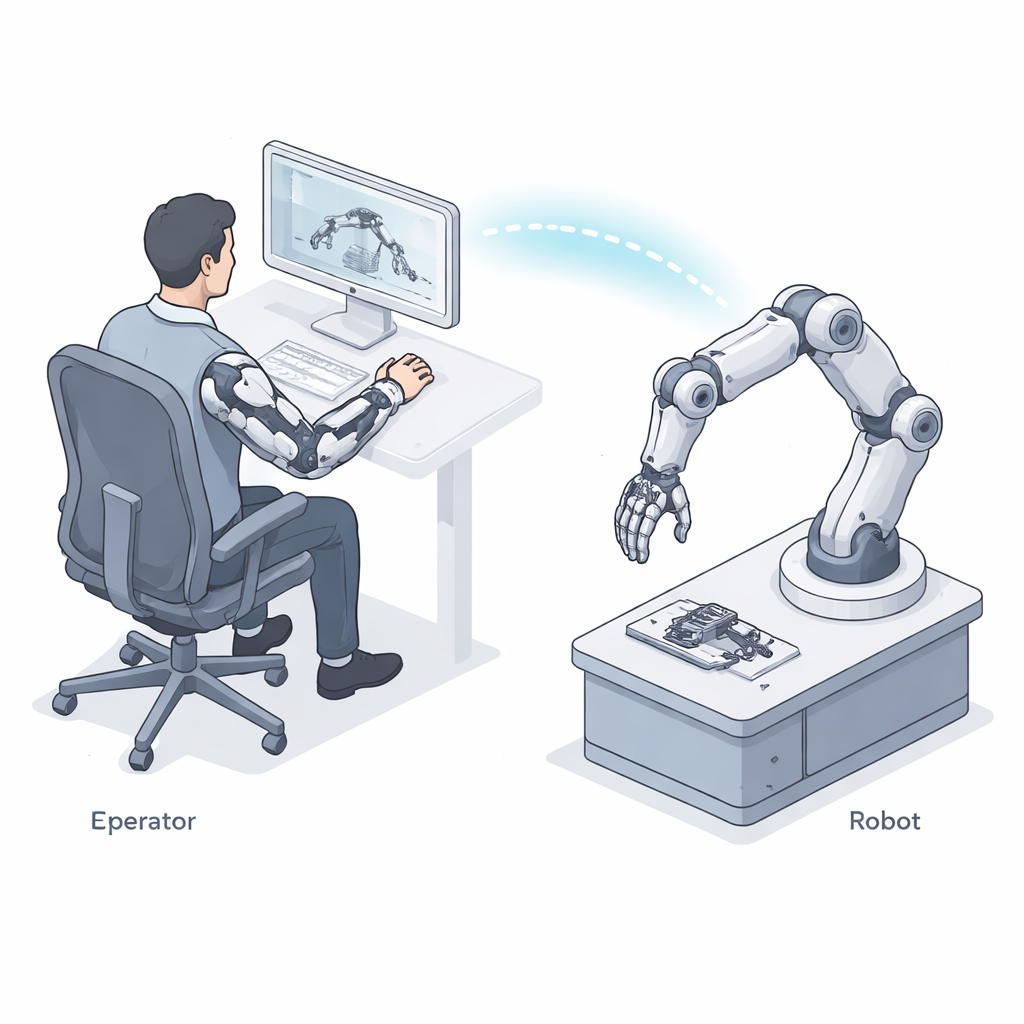
Muoversi con il corpo, non contro di esso
Le spalle umane non ruotano soltanto come cerniere; la scapola scorre anche sopra la gabbia toracica. Molti esoscheletri ignorano questo e finiscono per ostacolare il movimento naturale, causando disagio. Questo progetto aggiunge un modulo passivo con diversi gradi di libertà supplementari che segue in modo discreto i lievi spostamenti della spalla e della parte superiore del corpo, riducendo la pressione su pelle e articolazioni. Allo stesso tempo, i giunti motorizzati sono tarati in modo che la loro coppia — la forza di torsione — resti al di sotto dei limiti di sicurezza per i tessuti umani. Arresti di emergenza e rivelatori di inceppamento completano le caratteristiche di sicurezza, permettendo al sistema di reagire rapidamente se qualcosa va storto.
Un modo più intelligente di percepire il contatto
Oltre alla meccanica, gli autori si concentrano su ciò che l’utilizzatore percepisce. Quando il robot remoto tocca o spinge contro qualcosa — una parete, l’impugnatura di uno strumento o un altro oggetto — quelle forze sono tradotte attraverso l’esoscheletro in modo che l’utente percepisca la resistenza. Il sistema di controllo fonde due esigenze che normalmente si scontrano: il tracciamento accurato dei movimenti dell’operatore e un comportamento morbido e conforme quando le forze di contatto aumentano. A basse forze, il sistema si comporta rigido e preciso, seguendo da vicino il percorso del braccio dell’utilizzatore. Quando le forze superano una soglia di sicurezza, il controllo si ammorbidisce automaticamente, permettendo una certa cedevolezza in modo che gli urti siano ammortizzati anziché violenti. Gli autori utilizzano strumenti matematici basati sull’energia per dimostrare che questo comportamento combinato rimane stabile e non sfocia in oscillazioni incontrollate. 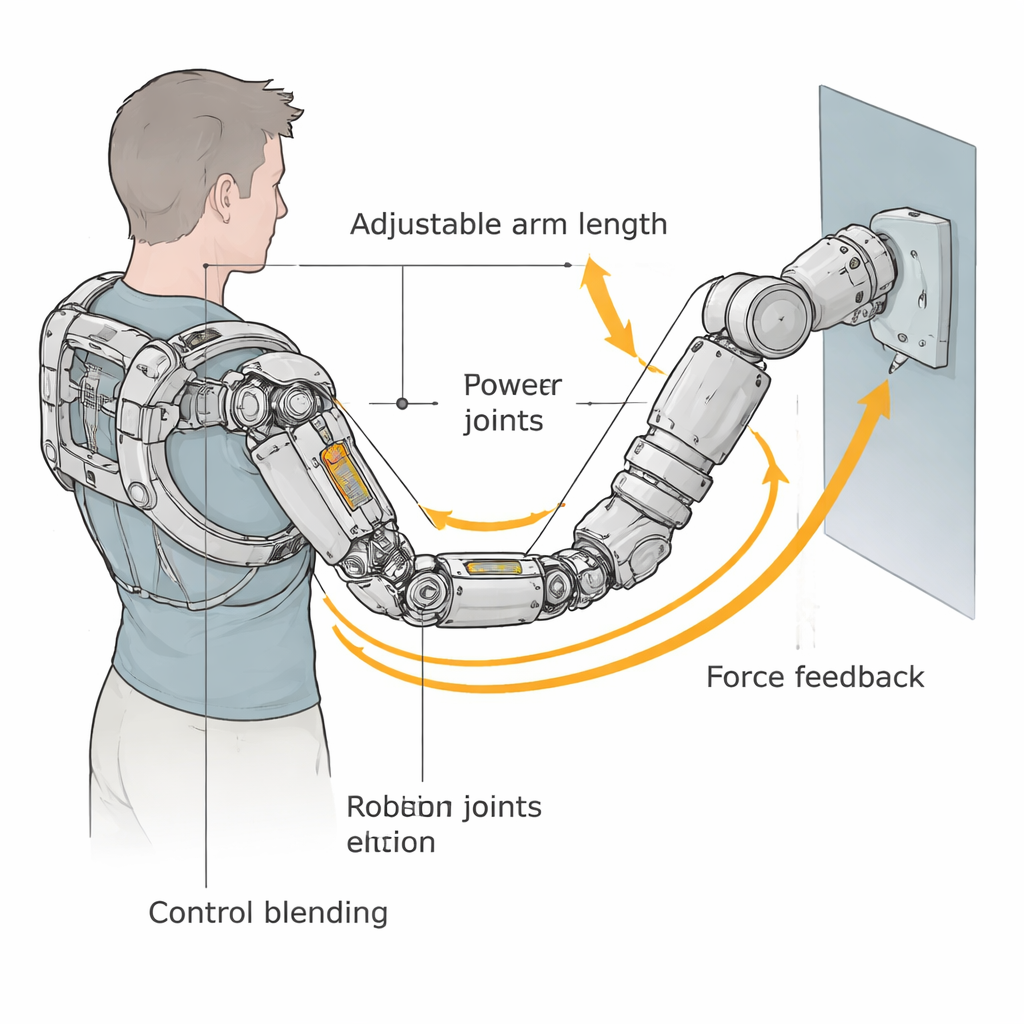
Mettere il sistema alla prova
Per valutare l’esoscheletro, i ricercatori lo hanno collegato a un braccio robotico industriale ampiamente utilizzato. Quando una persona che indossava l’esoscheletro ha tracciato un percorso a otto nell’aria, il robot remoto ha riprodotto il movimento da vicino, nonostante piccoli ritardi di comunicazione. Test aggiuntivi hanno esaminato l’accuratezza della rilevazione della lunghezza del braccio: le letture di tensione dai sensori scorrevoli corrispondevano alle misure fisiche con errori inferiori a pochi millimetri, anche dopo ripetute operazioni di indossare e togliere il dispositivo. In simulazioni controllate in cui il robot premeva contro una parete rigida virtuale, l’intero schema di controllo ha ridotto le forze di contatto di picco di quasi il 70 percento rispetto a una configurazione di base, pur preservando in larga misura la precisione di tracciamento nel moto libero.
Cosa significa per il lavoro reale e la cura
In termini pratici, questa ricerca ci avvicina a robot remoti che sembrano naturali e sicuri da controllare quanto muovere il proprio braccio. Combinando una struttura regolabile che abbraccia il corpo, un tracciamento accurato del movimento umano e un feedback di forza intelligente che si adatta al volo, il sistema promette una teleoperazione più precisa e meno faticosa in ambienti pericolosi. La stessa tecnologia potrebbe anche servire pazienti in recupero da ictus, permettendo ai terapisti di guidare e registrare i movimenti del braccio mentre i pazienti ricevono assistenza e feedback realistici. Man mano che le versioni future integreranno segnali dai muscoli e dallo sguardo e impareranno dall’esperienza, tali coppie esoscheletro-robot potrebbero diventare strumenti versatili sia per missioni estreme sia per la riabilitazione quotidiana.
Citazione: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Parole chiave: esoscheletro per teleoperazione, controllo di braccio robotico, feedback di forza, robotica riabilitativa, operazioni a distanza in ambienti pericolosi