Clear Sky Science · it
Protocollo di intervento d’emergenza end-to-end per incidenti in gallerie potenziato con apprendimento per rinforzo
Perché i salvataggi in galleria più intelligenti sono importanti
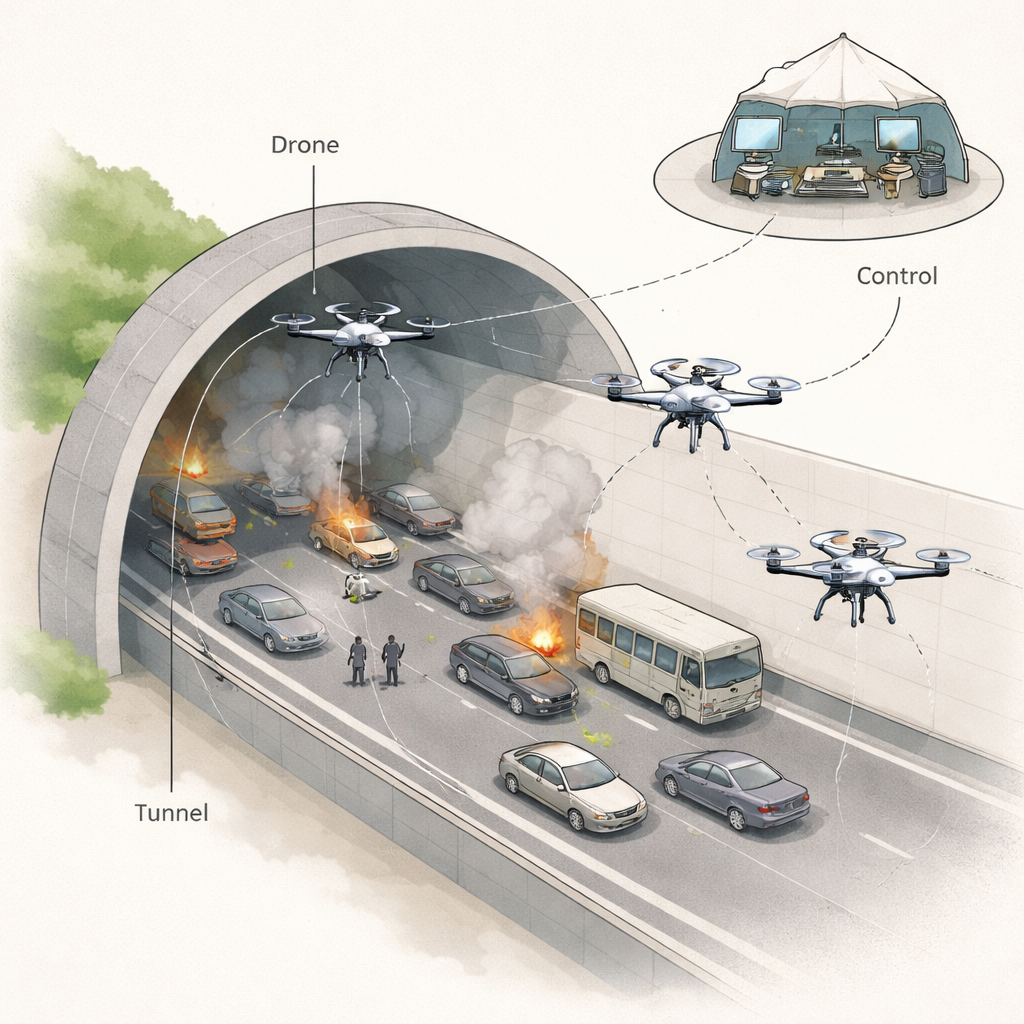
Quando si verifica un disastro in una galleria stradale—sia per un incidente, un incendio o un crollo strutturale—le persone possono restare intrappolate in un tubo lungo, fumoso e labirintico con pochissime uscite. I soccorritori umani devono entrare proprio mentre la visibilità cala, la temperatura sale e i detriti ostruiscono il passaggio. Questo studio esplora come piccoli robot volanti, o droni, guidati da una strategia di apprendimento intelligente, potrebbero diventare aiutanti rapidi e affidabili in queste situazioni pericolose, trovando vittime e tracciando percorsi sicuri mantenendo le squadre umane lontane dai pericoli maggiori.
Colli di bottiglia sotterranei e pericolosi
Le città moderne dipendono dalle gallerie per autostrade, ferrovie e servizi, ma lo stesso design chiuso che le rende efficienti le rende anche particolarmente letali in caso di incidente. Gli incendi diffondono rapidamente il fumo, si accumulano gas tossici e i passaggi stretti possono intasarsi con veicoli incidentati o calcinacci. Le squadre di soccorso tradizionali spesso entrano con informazioni limitate, indovinando dove andare mentre le loro radio faticano a funzionare attraverso rocce e cemento massiccio. Disastri passati in Cina e Giappone, tra gli altri, hanno dimostrato quanto sia difficile raggiungere le vittime in tempo, sottolineando l’esigenza di strumenti che possano osservare e prevedere in modi oltre le capacità umane.
Insegnare ai droni a esplorare e cercare
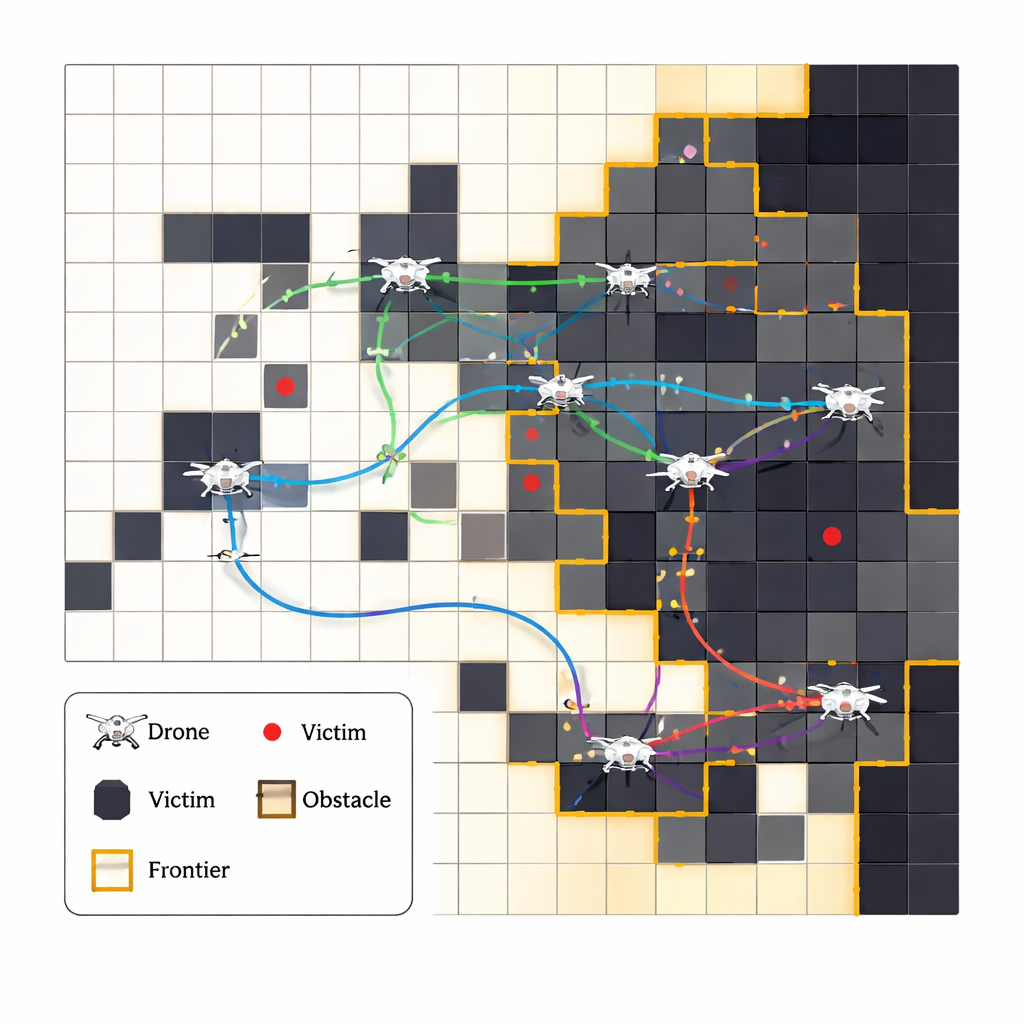
Gli autori propongono un sistema in cui più droni autonomi lavorano insieme per esplorare una galleria danneggiata, costruire una mappa in tempo reale e localizzare persone intrappolate. Invece di seguire un percorso fisso e preprogrammano, ogni drone impara dall’esperienza usando un metodo chiamato apprendimento per rinforzo: prova azioni, osserva cosa succede e scopre gradualmente quali scelte tendono a portare a salvataggi più rapidi e a meno errori. La galleria è rappresentata come una griglia di celle e i droni si concentrano sulle “frontiere” dove lo spazio conosciuto incontra lo spazio sconosciuto, spingendo costantemente quel confine verso l’esterno. Ad ogni passo scelgono tra un piccolo insieme di movimenti sulla griglia, aggiornando le loro tabelle interne su quali mosse hanno funzionato meglio in situazioni simili in passato.
Far cooperare molti robot senza troppo sovraccarico comunicativo
Far cercare diversi droni nella stessa galleria apre una nuova sfida: come evitare che si scontrino tra loro o ispezionino ripetutamente le stesse aree, specialmente quando la comunicazione può essere inaffidabile? Invece di dotarli di un capo centrale o di continui scambi radio, i ricercatori progettano un semplice sistema di punteggio che incoraggia silenziosamente un buon comportamento di gruppo. Un drone guadagna una ricompensa elevata quando scopre una nuova vittima, ma viene penalizzato se spreca tempo rivisitando lo stesso luogo, collide con un altro drone o “fallisce” esaurendo la batteria. Col tempo questo spinge ogni drone a favorire regioni inesplorate e a tenersi lontano dai compagni, così una sorta di cooperazione emerge naturalmente dalle conseguenze condivise, anche se ciascuno apprende tecnicamente in modo indipendente.
Prendere spunti dai lupi per evitare di rimanere bloccati
L’apprendimento basato soltanto su tentativi ed errori può talvolta incagliarsi in abitudini sicure ma subottimali—come scegliere sempre un corridoio familiare invece di provare una scorciatoia rischiosa. Per mantenere i droni curiosi, il team prende in prestito idee da un modello matematico di come i lupi grigi cacciano in branco. Questo componente di “Ottimizzazione Grey Wolf” induce i droni a imitare occasionalmente i modelli di ricerca con le migliori prestazioni osservate finora, pur lasciando spazio all’esplorazione. In pratica, questo orienta quali nuove azioni vengono tentate, aiutando il processo di apprendimento a uscire dai vicoli ciechi e ad adattarsi quando la galleria cambia—per esempio se una parte del percorso viene improvvisamente bloccata da fuoco o detriti.
Testare l’approccio in disastri virtuali
Poiché non è sicuro testare strategie non comprovate in gallerie d’emergenza reali, i ricercatori costruiscono simulazioni al computer dettagliate che imitano corridoi stretti, vicoli ciechi, ostacoli e vittime sparse. Confrontano il loro sistema basato sull’apprendimento con diversi altri metodi, inclusa la semplice esplorazione casuale e l’ottimizzazione autonoma senza apprendimento. Sia nei test con un singolo drone sia in quelli multi-drone, il loro approccio trova le vittime più rapidamente, esplora più della galleria con meno passi sprecati e evita le collisioni in modo più affidabile. È importante che tutto ciò venga fatto usando calcoli leggeri basati su tabelle anziché reti di deep learning affamate di energia, il che significa che potrebbe realisticamente funzionare su piccoli computer di bordo durante un’emergenza reale.
Cosa potrebbe significare per i soccorsi futuri
Lo studio mostra che sciami di droni relativamente semplici, guidati da regole di apprendimento ben progettate e da alcune idee prese dalla natura, potrebbero diventare partner preziosi per vigili del fuoco e squadre di soccorso nelle catastrofi in galleria. Tracciando rapidamente ambienti fumosi e mutevoli e puntando le località probabili delle vittime senza controllo umano costante, tali sistemi potrebbero risparmiare minuti preziosi nei tempi di intervento riducendo i rischi affrontati dai soccorritori. Sebbene il lavoro finora si basi su simulazioni e sensori ideali, pone una base pratica per futuri sistemi reali che devono operare sotto vincoli stretti di tempo, energia e calcolo in alcuni degli scenari di soccorso più impegnativi del pianeta.
Citazione: ur Rehman, H.M.R., Gul, M.J., Younas, R. et al. End-to-end emergency response protocol for tunnel accidents augmentation with reinforcement learning. Sci Rep 16, 6226 (2026). https://doi.org/10.1038/s41598-026-37191-w
Parole chiave: intervento di emergenza in galleria, droni per ricerca e soccorso, apprendimento per rinforzo multi-agente, gestione robotica delle catastrofi, esplorazione autonoma