Clear Sky Science · it
Stima in tempo reale della SOC della batteria e strategia di ricarica autonoma per robot dinamici di accumulo energetico con filtro di Kalman esteso
Perché le batterie più intelligenti sono importanti
Dai corrieri di magazzino ai robot d’ispezione, i robot mobili sono utili quanto le loro batterie permettono. Se un robot sbaglia a valutare quanta energia gli resta, può fermarsi lontano da una stazione di ricarica, interrompendo il lavoro e rischiando danni alla batteria. Questo articolo presenta un nuovo modo per i robot di «conoscere» il livello reale della loro batteria in tempo reale e di scegliere quando e come ricaricarsi, così da lavorare più a lungo, in modo più sicuro e con meno supervisione umana.

Robot, compiti intensi e batterie sotto stress
A differenza delle auto elettriche che viaggiano in modo fluido in autostrada, molti robot mobili affrontano partenze brusche, arresti e continue variazioni di carico. Questi scossoni provocano rapidi sbalzi di corrente e tensione della batteria, che confondono i metodi tradizionali di stima della carica residua. Metodi semplici che leggono la tensione o conteggiano la corrente nel tempo tendono ad assumere condizioni calme e costanti e non seguono come la batteria invecchia o si riscalda. Di conseguenza, le loro stime deviano, gli errori si accumulano e il robot può sia ricaricarsi troppo spesso sia sollecitare eccessivamente la batteria, riducendone la durata.
Un modello più realistico di quello che succede dentro la batteria
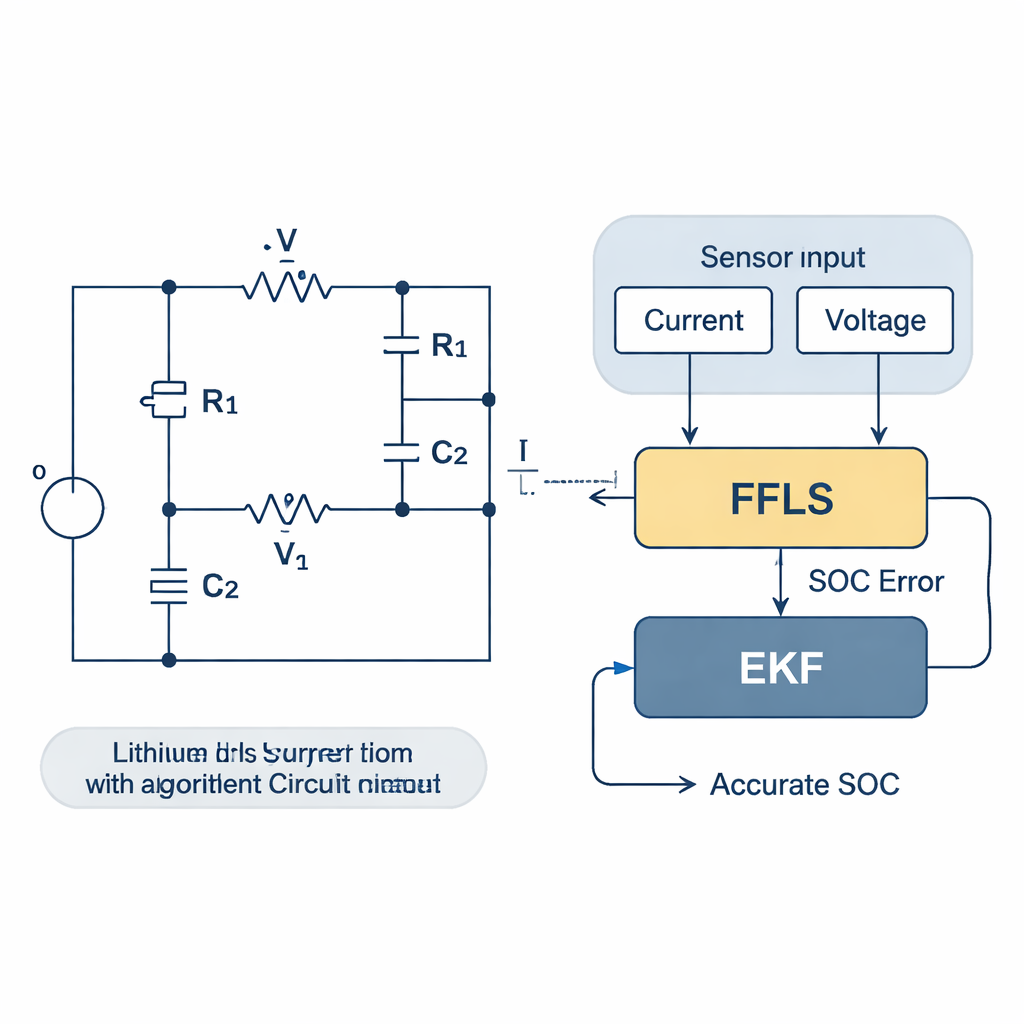
Gli autori affrontano il problema fornendo al robot una rappresentazione più realistica del suo pacco batteria al fosfato di litio e ferro. Invece di trattare la batteria come una scatola nera con un unico valore di tensione, la rappresentano come una rete elettrica con resistenza interna e due rami di «polarizzazione» che imitano il movimento e l’accumulo di ioni all’interno della cella. Questo modello RC di secondo ordine cattura risposte veloci e lente ai cambiamenti di carico. Il robot misura continuamente corrente e tensione e adatta questi segnali al modello usando un metodo dei minimi quadrati che include un «fattore di oblio» — un espediente matematico per dare più peso ai dati recenti e attenuare la storia obsoleta quando le condizioni cambiano.
Lasciare che l’algoritmo impari e si adatti in tempo reale
Sovrapposto a questo modello, il team applica un filtro di Kalman esteso, uno strumento ampiamente usato per tracciare stati nascosti in dati rumorosi. Qui, lo stato nascosto è il vero stato di carica della batteria. Durante il funzionamento, il filtro predice come la carica dovrebbe variare basandosi sul modello e sulla corrente misurata, quindi corregge quella previsione usando la tensione misurata. Il modulo dei minimi quadrati con fattore di oblio continua ad aggiornare online i parametri chiave del modello, così il filtro non si basa mai su una descrizione della batteria obsoleta o tarata in fabbrica. In modo intelligente, i ricercatori sfruttano anche un legame tra resistenza interna e una grandezza chiamata capacità di polarizzazione: quando la temperatura sale, la resistenza diminuisce e la capacità aumenta. Osservando entrambe insieme, il sistema può inferire gli effetti della temperatura senza alcun sensore di temperatura fisico e adattare il modello di conseguenza.
Insegnare ai robot quando e come ricaricarsi
Stime di carica accurate sono solo metà della storia; l’altra metà è come il robot le usa. Gli autori progettano una strategia di ricarica autonoma che evita sia il continuo «topping up» sia le scariche profonde. Definiscono limiti di carica superiore e inferiore: se la batteria scende sotto una soglia, il robot dà priorità al ritorno alla base; se è già vicino al limite superiore, rimanda la ricarica e continua a lavorare. Nell’intervallo sicuro, il robot si ricarica durante i momenti di inattività. Il sistema monitora anche ogni cella del pacco batteria e bilancia la loro carica in modo che nessuna cella venga sovraccaricata mentre altre restano indietro, un passaggio chiave per prevenire l’invecchiamento prematuro. Per rendere il docking efficiente, il robot combina la navigazione a livello di ambiente con una guida a infrarossi a corto raggio, accorciando percorsi e tempi di aggancio.
Batterie più durature e alimentazione robotica più affidabile
Nei test su dataset pubblici di batterie, simulazioni e robot reali, il nuovo metodo ha stimato lo stato di carica con circa il 98% di accuratezza, superando nettamente diverse alternative avanzate basate su filtri a particelle, reti neurali e Transformer. Le batterie gestite con questo approccio mantenevano meglio la carica durante settimane di uso simulato e hanno resistito al 15–40% in più di cicli carica–scarica rispetto ai metodi concorrenti. La resistenza interna è cresciuta più lentamente, indicatore di celle più sane, e i robot hanno trascorso meno tempo alla base pur mantenendo una migliore salute delle batterie. Per un non addetto ai lavori, la conclusione è che questa tecnica permette ai robot di diventare migliori «custodi» delle proprie batterie: possono valutare l’energia con maggiore precisione, scegliere momenti più intelligenti per ricaricarsi e prolungare silenziosamente la vita operativa di costosi pacchi batteria senza sensori aggiuntivi o grandi potenze di calcolo.
Citazione: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Parole chiave: robot mobili, stato di carica della batteria, ricarica autonoma, filtro di Kalman esteso, batterie al fosfato di litio e ferro