Clear Sky Science · it
Catena dinamica per la schedulazione di sistemi multi-AGV con profilazione del moto sensibile al carico
Perché i robot di magazzino hanno bisogno di tempi migliori
Lo shopping online ha riempito i magazzini di merci che devono essere spostate rapidamente, in sicurezza e 24 ore su 24. Molte strutture ora si affidano a flotte di robot di piano — Veicoli a Guida Automatica, o AGV — per trasportare scaffali e pallet. Ma se questi robot vengono schedulati usando assunzioni troppo semplicistiche su come si muovono, possono perdere tempo, danneggiare pacchi fragili o addirittura correre il rischio di collisioni. Questo articolo presenta un nuovo modo di pianificare e coordinare molti AGV contemporaneamente tenendo conto del loro comportamento fisico reale, promettendo traffico più fluido e carichi più sicuri nei magazzini affollati.
Robot che spostano merci, non solo numeri
Gli AGV moderni già attraversano magazzini, aeroporti e fabbriche, trainando carrelli o sollevando scaffali e pallet. La maggior parte dei software esistenti che gestiscono queste flotte opera a un livello alto: decide quale robot deve svolgere quale compito e indicativamente quale percorso seguire. Per semplificare i calcoli, di solito si assume che il tempo di percorrenza tra due punti sia fisso, ignorando quanto rapidamente un robot possa realmente accelerare o rallentare, o quanto sia pesante il suo carico. Gli autori mostrano che questa scorciatoia crea problemi negli edifici reali. I robot possono arrivare alle intersezioni prima o dopo il previsto, aumentando la probabilità di ingorghi, mancati urti o frenate brusche che scuotono il carico che trasportano.
Aggiungere la fisica reale al piano
I ricercatori affrontano questo divario con un approccio in due fasi che fonde la fisica con la schedulazione. Prima di tutto, progettano un stimatore dei Tempi di Percorrenza Dinamici per AGV, chiamato DTT-AGV. Invece di trattare un corridoio come un unico blocco temporale, DTT-AGV suddivide ogni spostamento in fasi: accelerazione, crociera a velocità costante e decelerazione. Usa un modello meccanico semplice di un AGV che trasporta uno scaffale, in cui lo scaffale si comporta come una massa collegata tramite molle e smorzatori. Questo modello cattura come accelerazioni e decelerazioni possano far oscillare o vibrare i carichi. Da ciò, l’algoritmo calcola quanto velocemente il veicolo può muoversi in sicurezza per una data distanza e un dato carico senza superare limiti di velocità, forza o vibrazione, e restituisce un tempo di percorrenza realistico per ogni segmento del percorso.
Evita che i robot si incontrino faccia a faccia
In secondo luogo, il team introduce un metodo di Catena dei Tempi di Arrivo, ATC-AGV, che coordina molti robot su percorsi condivisi. Una volta che DTT-AGV ha stimato quanto richiederà ogni segmento, ATC-AGV assegna orari precisi di arrivo e partenza in ogni nodo — intersezioni, curve o punti di trasferimento — lungo la traiettoria di ciascun robot. Costruisce una “catena” temporale in ogni nodo condiviso, garantendo un margine di sicurezza tra i veicoli e tenendo conto degli stati correnti dei robot, come se siano caricati, in ricarica o in fase di svolta. Se un nuovo piano causerebbe la presenza ravvicinata di due AGV nello stesso nodo, ATC-AGV sposta l’orario di uno dei robot il minimo necessario per ripristinare il margine di sicurezza. Di fatto, trasforma la griglia del magazzino in una mappa sensibile al tempo che aiuta a prevenire collisioni prima che possano avvenire.
Testare movimenti più fluidi e percorsi più delicati
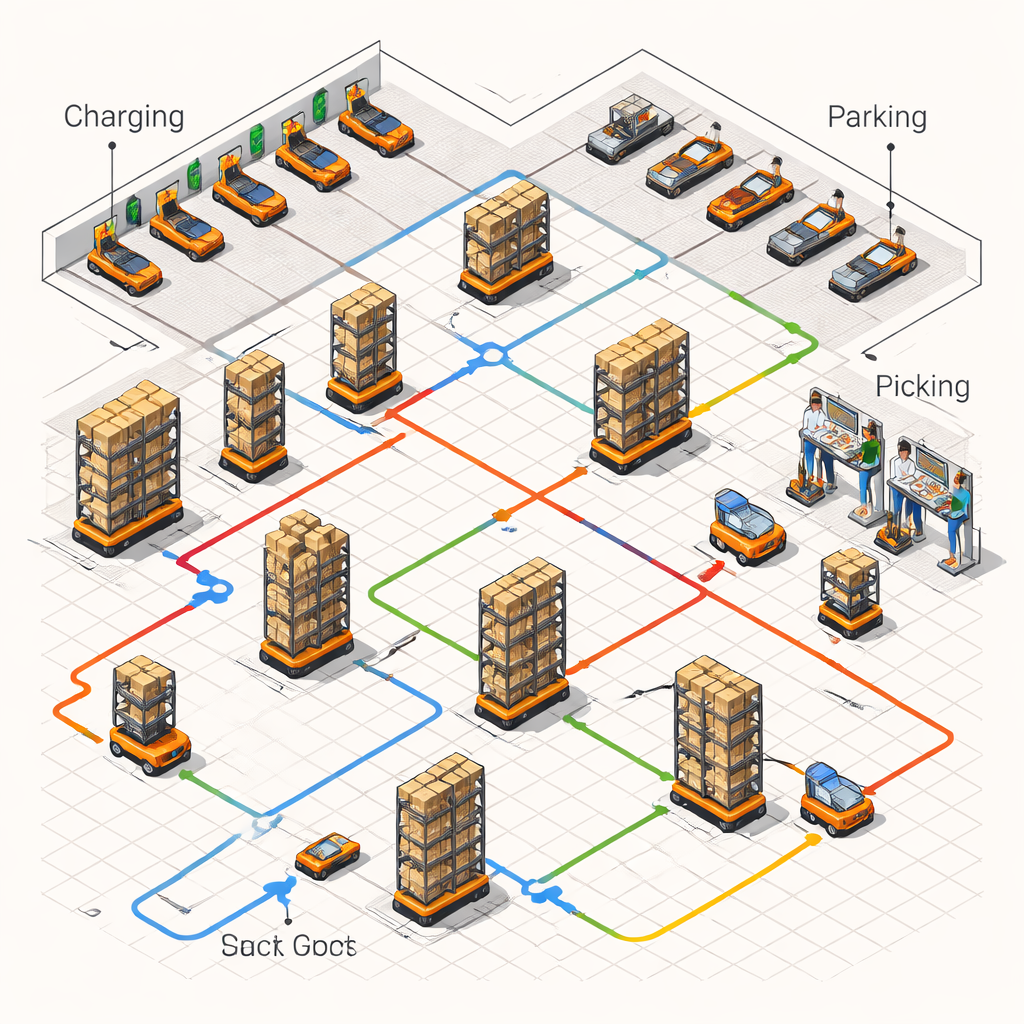
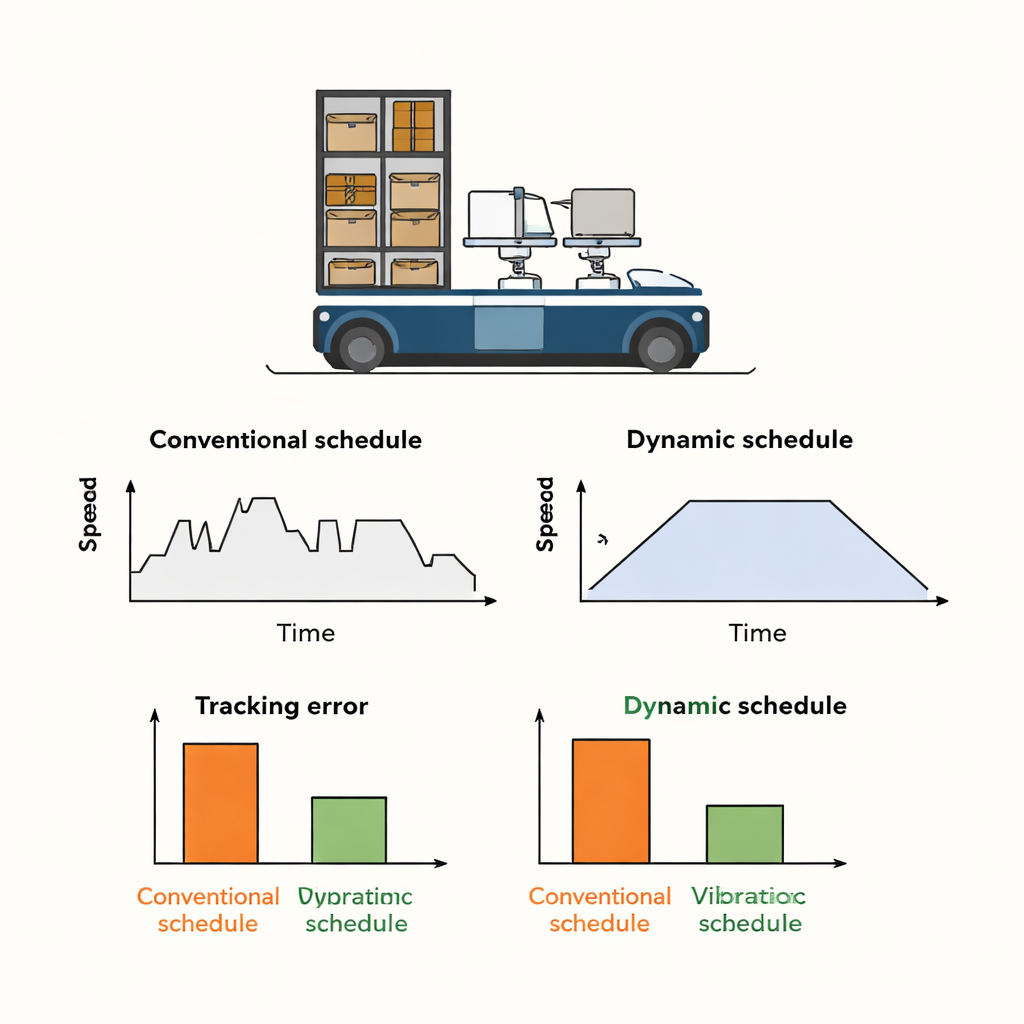
Per verificare le loro idee, gli autori simulano AGV in un magazzino cross-docking a griglia che include aree di ricarica, parcheggi e zone di scaffali. Confrontano il loro pianificatore con un metodo convenzionale che assume velocità quasi costante e ignora le fasi dettagliate del moto. In un test, un robot percorre un tragitto a forma di L, poi svolta di 90 gradi. L’approccio tradizionale genera cambiamenti bruschi di velocità all’angolo, che il robot reale non può seguire perfettamente. Il risultato sono grandi errori di tracciamento — differenze tra dove il robot dovrebbe essere e dove si trova effettivamente — e picchi di errore temporale in punti chiave. Con il nuovo pianificatore, il percorso è suddiviso in chiare fasi di accelerazione, crociera e frenata. Il robot simulato ora segue la traiettoria target da vicino, con errori molto più piccoli e svolte più morbide.
Più dolce per i pacchi e a prova di futuro
Il secondo insieme di test si concentra su come si comporta il carico stesso. Quando si usa la schedulazione convenzionale, la base del robot subisce scossoni improvvisi di accelerazione che eccitano il comportamento a molla dello scaffale, causando forti vibrazioni nel carico. Con la schedulazione dinamica e sensibile al carico, le accelerazioni restano in una banda più ristretta e cambiano più dolcemente. Misurate nel tempo, sia le vibrazioni di picco sia quelle medie del carico diminuiscono notevolmente, cosa critica per oggetti fragili, impilati o instabili. Gli autori esplorano inoltre come fattori trascurati, come l’attrito ruota-pavimento, potrebbero influenzare le loro stime e trovano che, nelle condizioni tipiche di magazzino, l’errore temporale aggiuntivo rimane entro i margini di sicurezza incorporati nel loro algoritmo.
Cosa significa per i magazzini reali
In termini semplici, questo lavoro insegna ai pianificatori di AGV a rispettare il moto reale delle macchine che controllano. Basando i tempi di percorrenza e le decisioni di precedenza su quanto velocemente i robot possono realmente accelerare, rallentare e trasportare carichi diversi senza danneggiarli, il framework proposto riduce gli errori di seguimento del percorso, abbassa le vibrazioni del carico e diminuisce il rischio di conflitti alle intersezioni. Per gli operatori di magazzino e i produttori, ciò si traduce in traffico più fluido, gestione più sicura delle merci e una base che può scalare man mano che le flotte crescono e le configurazioni diventano più complesse.
Citazione: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Parole chiave: veicoli a guida automatica, robotica di magazzino, schedulazione senza collisioni, pianificazione del moto, logistica intelligente