Clear Sky Science · it
Un framework YOLO11n-seg leggero per il rilevamento in tempo reale delle crepe superficiali con segmentazione
Perché le crepe sottili sono importanti
Le crepe nascoste in strade, ponti e edifici possono sembrare innocue, ma spesso sono i primi segnali che una struttura si sta deteriorando. Individuare queste linee precocemente può prevenire riparazioni costose o perfino guasti disastrosi. Tuttavia, la maggior parte delle ispezioni è ancora effettuata da persone che camminano o guidano lentamente lungo le superfici, prendendo appunti a mano. Questo studio esplora come un sistema di intelligenza artificiale compatto possa individuare e delimitare le crepe in tempo reale, abbastanza veloce da essere eseguito su droni, piccoli robot e sensori a bassa potenza anziché soltanto in potenti data center.
Dai controlli manuali alla visione artificiale
Gli ingegneri hanno a lungo cercato di automatizzare il rilevamento delle crepe usando tecniche tradizionali di elaborazione delle immagini come il rilevamento dei bordi e la sogliatura. Questi metodi funzionano in ambienti di laboratorio puliti ma falliscono rapidamente nel mondo reale, dove ombre, macchie e superfici ruvide confondono gli algoritmi semplici. Più recentemente, l’apprendimento profondo ha cambiato le regole: le reti neurali possono imparare direttamente dalle immagini cosa è una crepa. Le versioni iniziali riuscivano a dire se una piccola porzione d’immagine conteneva una crepa, ma faticavano a indicarne con precisione la posizione e spesso erano troppo lente per ispezioni in tempo reale.
Come un modello snello impara a vedere le crepe
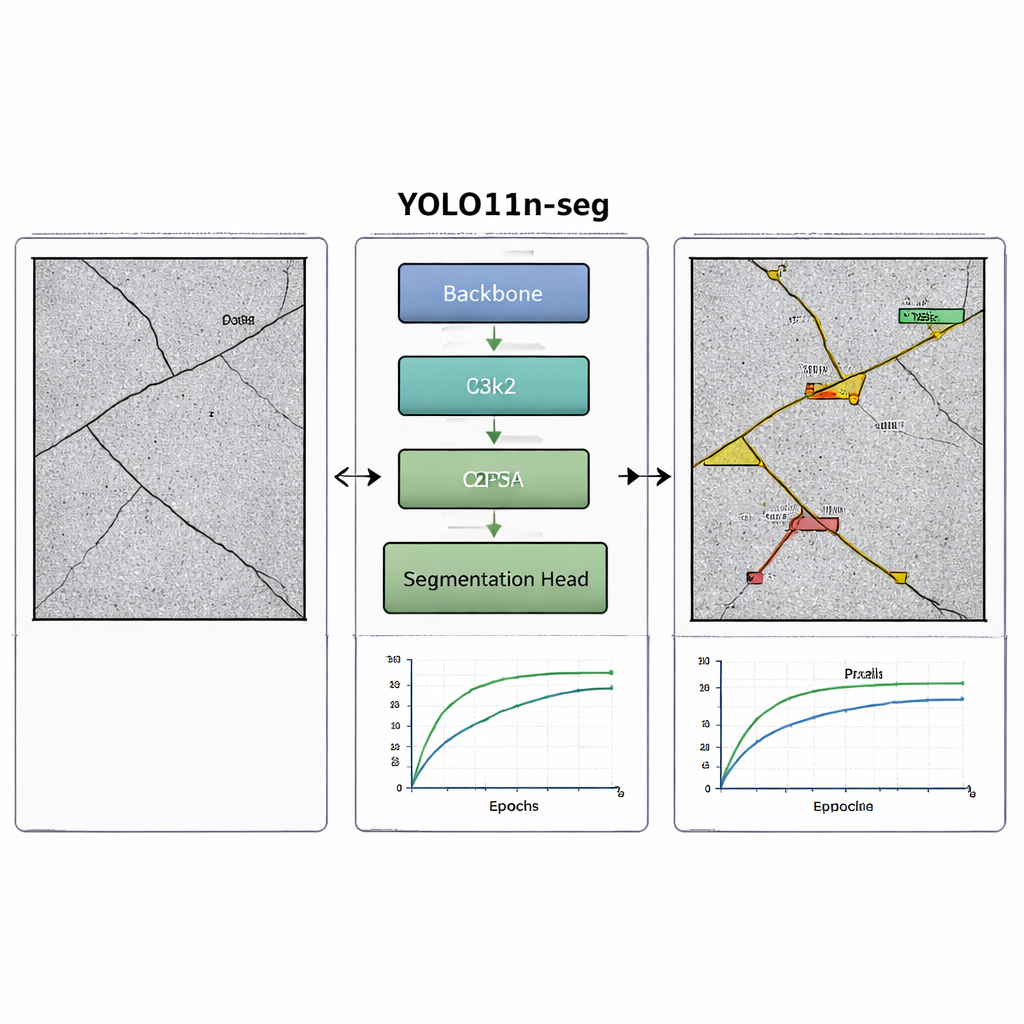
Gli autori si basano sulla famiglia di modelli YOLO, un insieme popolare di strumenti nella computer vision noti per individuare oggetti in un unico passaggio veloce attraverso la rete. Si concentrano su una versione molto piccola chiamata YOLO11n-seg, progettata per tracciare la forma esatta delle crepe, non solo per disegnare riquadri approssimativi attorno a esse. Il modello è addestrato sul dataset Crack-Seg, che contiene oltre 11.000 immagini stradali accuratamente etichettate in cui ogni pixel di crepa è segnato. Le immagini vengono ridimensionate a un formato standard e immesse nella rete, che impara progressivamente a distinguere i sottili e tortuosi motivi del danno reale dai dettagli di sfondo innocui come texture o sporcizia.
Trucchi intelligenti per dettagli minuscoli
Per individuare fratture capillari sul cemento ruvido, il modello utilizza due accorgimenti progettuali. Primo, un blocco speciale chiamato C3k2 cambia automaticamente tra finestre di osservazione piccole e leggermente più ampie, permettendo di seguire sia crepe molto sottili sia crepe più lunghe. Secondo, un modulo di attenzione spaziale chiamato C2PSA insegna al modello a concentrarsi sulle regioni probabili di crepa ignorando distrazioni come macchie d’olio, ombre o superfici a pattern. Insieme, questi elementi aiutano il sistema a delineare le crepe in modo più pulito e a ridurre la probabilità di confondere imperfezioni di sfondo con danni strutturali, mantenendo al contempo il modello sufficientemente piccolo da girare su hardware modesto.
Risultati rapidi senza hardware pesante
Nei test, la rete leggera contiene solo circa 2,8 milioni di parametri—poche rispetto a molti sistemi moderni di deep learning—eppure raggiunge prestazioni simili a progettazioni più grandi e lente. Sul benchmark Crack-Seg identifica correttamente le regioni di crepa con una precisione di circa il 79% e ottiene punteggi elevati per quanto riguarda l’accuratezza con cui le sue forme di crepa predette corrispondono al ground truth. In modo cruciale, elabora ogni immagine in circa 3,6 millisecondi su una GPU standard, corrispondenti a centinaia di frame al secondo. Rispetto a modelli largamente usati come U-Net, Mask R-CNN e una versione precedente di YOLO, offre un’accuratezza di segmentazione competitiva o migliore pur essendo drasticamente più veloce, rendendolo pratico per flussi video continui da droni o veicoli di ispezione.
Verso controlli strutturali automatici
Per i non esperti, la conclusione principale è che questo lavoro dimostra che è ormai possibile costruire strumenti di IA piccoli ed efficienti che non solo individuano le crepe, ma ne tracciano anche forma e dimensione esatte abbastanza rapidamente per il monitoraggio in tempo reale. Sebbene crepe estremamente deboli in condizioni di scarsa illuminazione o maltempo rimangano una sfida, il sistema proposto YOLO11n-seg offre un promettente equilibrio tra velocità e affidabilità. Con ulteriori miglioramenti e l’integrazione in apparecchiature da campo, tali modelli potrebbero aiutare città e enti a rilevare i danni prima, a prioritarizzare le riparazioni e a mantenere le infrastrutture vitali più sicure con meno lavoro manuale.
Citazione: Tiwari, S., Gola, K.K., Kanauzia, R. et al. A lightweight YOLO11n seg framework for real time surface crack detection with segmentation. Sci Rep 16, 6566 (2026). https://doi.org/10.1038/s41598-026-37073-1
Parole chiave: crepe nelle infrastrutture, computer vision, apprendimento profondo, ispezione in tempo reale, segmentazione YOLO