Clear Sky Science · it
Aggancio di quadrotori a parete usando un controllo adattivo continuo di secondo ordine in presenza di incertezze
Perché attaccare i droni alle pareti conta
Immaginate un piccolo drone che non si limita a stazionare finché la batteria non si scarica, ma può posarsi silenziosamente su una parete come un uccello e rimanervi ore a osservare un ponte, un campo coltivato o il margine di una foresta. Questo articolo presenta un nuovo modo di controllare tali droni “aggancianti” affinché possano volare fino a una superficie verticale, entrare in contatto senza rimbalzare e aderire in modo stabile anche quando l’aria è turbolenta o il comportamento del drone non è perfettamente noto. Il lavoro affronta la sfida di trasformare una macchina volante delicata in uno strumento di ispezione affidabile ed energeticamente efficiente.
Dai robot che stazionano alle esploratrici che si aggrappano alle pareti
I piccoli droni a quattro rotori, o quadrotori, sono già impiegati per mappature, ispezione di costruzioni, monitoraggio della fauna selvatica e agricoltura di precisione. Tuttavia il loro limite principale è l’autonomia: il mantenimento in hovering consuma molta energia. Agganciarsi a una superficie—come una parete, un palo o il lato inferiore di un ponte—permette al drone di spegnere la maggior parte dei motori mantenendo i sensori al loro posto per osservazioni a lungo termine. Farlo in sicurezza è tutt’altro che banale. Durante la manovra breve ma critica di aggancio, il drone deve avvicinarsi alla parete, toccarla e ruotare in una posa con il muso verso il basso senza rimbalzare, scivolare o perdere controllo quando raffiche inaspettate o errori di modello disturbano il movimento.
La sfida di un atterraggio pulito sulla parete
Gli autori studiano un quadrotore dotato di un leggero braccio di supporto sulla parte anteriore, che funge da punto di contatto fisico con la parete. Man mano che il drone passa dal volo libero al contatto, la sua posizione (laterale, anteriore, verticale) e l’assetto (angoli di rollio, beccheggio, imbardata) sono strettamente accoppiati: cambiare orientamento modifica il modo in cui la spinta si traduce in moto, e la reazione improvvisa della parete può torcere il corpo del drone. A ciò si aggiungono effetti reali—come interazioni aerodinamiche vicino alla parete, piccole imprecisioni costruttive e rumore dei sensori—che si manifestano come perturbazioni sconosciute. Le tecniche di controllo robusto esistenti possono mantenere la stabilità, ma spesso provocano un “chattering” ad alta frequenza nei comandi ai motori, usurano l’hardware e garantiscono solo che gli errori diminuiscano gradualmente piuttosto che entro una finestra temporale breve e prevedibile.
Un modo più intelligente per bilanciare e adattarsi
Per superare questi problemi, l’articolo introduce uno schema di controllo adattivo continuo di secondo ordine (ASOCC). In termini semplici, il controllore osserva non solo quanto il moto del drone si discosta dall’obiettivo, ma anche quanto velocemente quell’errore sta cambiando, e modula i suoi comandi in modo che entrambi si annullino entro un tempo finito. Un osservatore delle perturbazioni integrato agisce come un “ascoltatore del rumore” in tempo reale, stimando l’effetto netto di forze sconosciute e discrepanze del modello e reinserendo quell’informazione nella legge di controllo. Crucialmente, i guadagni che determinano quanto fortemente il controllore reagisce vengono aggiustati al volo in base a queste stime, invece di essere fissati a priori. Poiché i segnali di controllo variano in modo morbido anziché commutare bruscamente, il progetto riduce molto il chattering pur mantenendo una forte robustezza.
Mettere alla prova il nuovo controllo
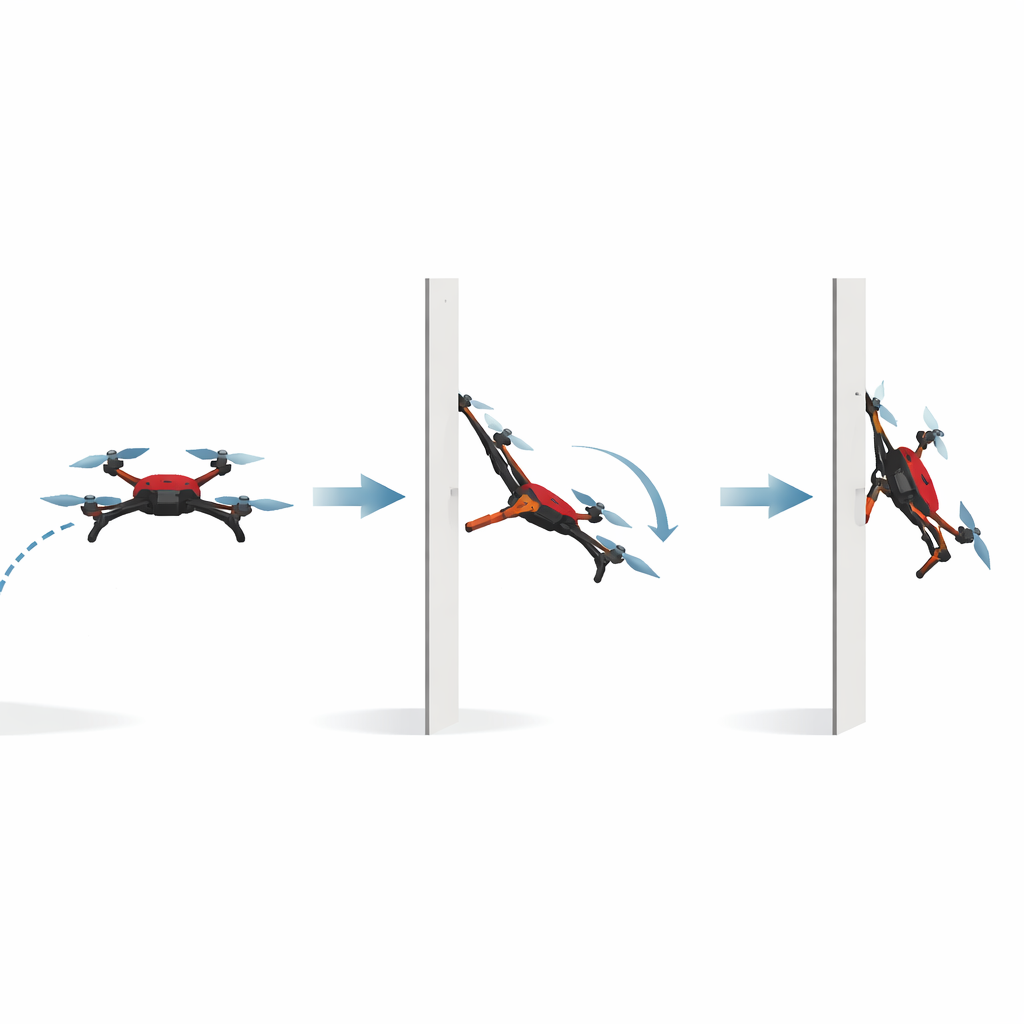
I ricercatori analizzano innanzitutto la matematica della coppia osservatore‑controllore e dimostrano, usando funzioni di tipo Lyapunov a energia, che tutti gli errori di moto convergono a zero entro un tempo finito nonostante perturbazioni limitate. Poi simulano in software scenari aggressivi di aggancio, sottoponendo il modello del drone a forze simili al vento, rumore casuale nelle misure ed errori intenzionali nei parametri fisici. In questi test, ASOCC ha guidato il drone attraverso tre fasi—preparazione, avvicinamento e aggancio—mantenendo piccoli gli errori di posizione e orientamento e rendendo lisci gli input di controllo. Rispetto a varie alternative avanzate, inclusi popolari controllori a scorrimento e basati su modello, il nuovo metodo ha ridotto le principali misure di errore di inseguimento di circa il 35–55%.
Dalla simulazione a un drone reale su una parete
Superando le simulazioni, il team ha costruito un mini quadrotore per aggancio usando una scheda di volo commerciale e una struttura stampata in 3D con un braccio anteriore. In esperimenti indoor, il drone ha volato autonomamente verso una parete inclinata, si è alzato a circa un metro e poi ha inclinato il muso verso il basso per fare contatto e rimanere attaccato. I dati temporali mostrano che altitudine, posizione orizzontale e angolo di beccheggio seguono da vicino i profili desiderati, con solo piccole increspature dovute al rumore dei sensori. Nonostante l’hardware a basso costo, i ritardi di comunicazione e i limiti degli attuatori, il drone non è rimbalzato né ha oscillato dopo l’impatto, dimostrando che ASOCC può gestire le realtà disordinate del volo.
Cosa significa questo per i futuri ispettori volanti
Per i non esperti, il risultato chiave è semplice: questo lavoro fornisce una strategia di controllo che permette ai piccoli droni di aderire in modo affidabile a superfici verticali e rimanervi, anche quando le condizioni non sono perfette. Combinando un controllo morbido ma fortemente correttivo con un osservatore adattivo delle perturbazioni, il metodo consente un aggancio rapido e preciso senza lo jitter e lo stress sull’hardware tipici di molti controllori robusti. Questo apre la strada a monitoraggi aerei di lunga durata con batterie più leggere, piattaforme più semplici e maggiore sicurezza—un passo importante verso flotte di robot autonomi “aggrappati alle pareti” che sorveglino silenziosamente infrastrutture, coltivazioni e ambienti naturali.
Citazione: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Parole chiave: aggancio quadrotore, controllo adattivo, ispezione con droni, osservatore delle perturbazioni, robotica aerea