Clear Sky Science · it
Un modello leggero basato su YOLO per la rilevazione accurata dei grappoli di pepe rosso nella raccolta robotica
Robot più intelligenti per raccolti piccanti
I grani di pepe di Sichuan, i minuscoli involucri rossi che conferiscono alla cucina sichuanese il caratteristico formicolio piccante, sono sorprendentemente difficili da raccogliere. I frutti crescono in grappoli densi e spinosi che possono facilmente danneggiarsi, e la raccolta manuale è un lavoro stagionale lento. Questo studio presenta un nuovo sistema di visione artificiale, chiamato Red-YOLO, progettato per aiutare piccoli robot mobili a individuare rapidamente e con precisione questi delicati grappoli di pepe nei frutteti reali, anche quando i frutti si sovrappongono o sono nascosti dalle foglie.
Perché la raccolta del pepe è così complicata
A differenza di frutti grandi e lisci come le mele, i grani di pepe rosso crescono come molte piccole bacche raggruppate su rami spinosi. I grappoli possono apparire molto diversi da un albero all’altro: alcuni sono stretti e compatti, altri sono sciolti e diffusi, e tutti sono circondati da sfondi complessi di rami, foglie e luce variabile. Per un robot, vedere dove termina un grappolo e dove inizia un altro — e quanto è compatto ciascuno — è essenziale. La forza di presa e persino le dimensioni dello strumento di raccolta del robot devono adattarsi in base alla densità dei frutti, altrimenti le fragili sacche d’olio dei peperoni possono rompersi, riducendo qualità e valore.
Costruire una libreria di immagini del mondo reale
Poiché non esistevano raccolte di immagini pubbliche per questa coltura, i ricercatori hanno dovuto prima creare il proprio dataset. In due stagioni di crescita nella contea di Hanyuan, nel Sichuan, hanno fotografato piante di pepe in frutteti reali usando uno smartphone di consumo, acquisendo 960 immagini quadrate ad alta risoluzione sotto differenti angolazioni del sole e orari del giorno. Ogni immagine è stata etichettata a mano con cura, distinguendo tra grappoli compatti e diffusi. Per insegnare al computer a gestire la variabilità, hanno modificato digitalmente molte delle immagini — regolando luminosità e contrasto, ribaltandole orizzontalmente, distorcendo alcune griglie e ruotando le viste. Questo ha ampliato il set di addestramento a oltre 4.300 immagini, mentre un piccolo insieme di foto non manipolate è stato messo da parte per testare in modo onesto le prestazioni finali del sistema.
Un modello di visione più snello e più preciso
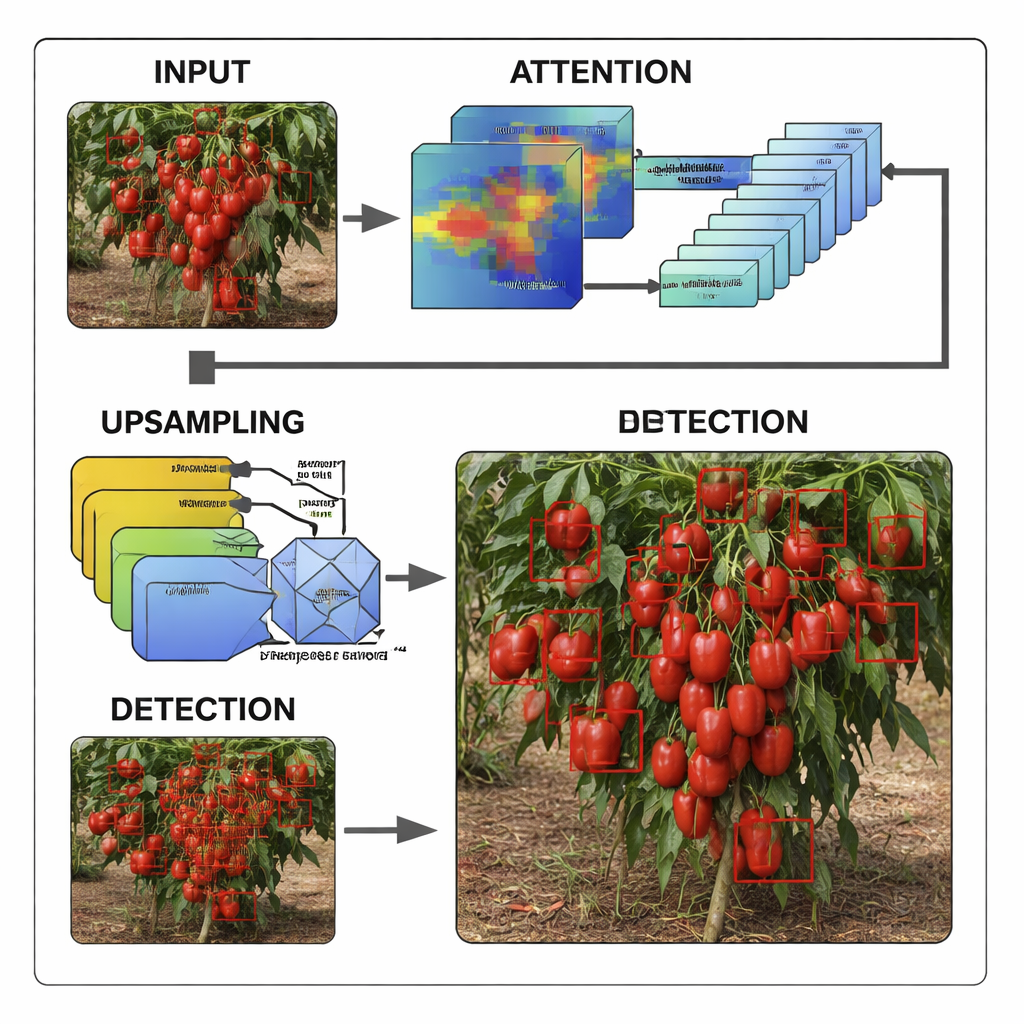
Al centro del sistema c’è YOLOv8, un modello di rilevamento oggetti «you only look once» ampiamente utilizzato che individua gli oggetti in un’unica passata veloce invece che in più fasi lente. Il team ha adattato una versione molto ridotta di questo modello e l’ha rimodellata specificamente per i grappoli di pepe rosso. Hanno aggiunto un modulo di attenzione che insegna alla rete a concentrarsi sui canali e sulle regioni più probabilmente contenenti frutti, ignorando distrazioni come cielo, rami e alberi lontani. Hanno riprogettato parti della rete in modo che possa riutilizzare le informazioni in modo più efficiente e ridurre i calcoli superflui. Hanno inoltre sostituito un semplice passaggio di ridimensionamento con un blocco di upsampling più intelligente che ricostruisce i dettagli fini e i contorni attorno ai peperoni sovrapposti, aiutando il modello a distinguere dove iniziano e finiscono i grappoli affollati.
Visione veloce e precisa per piccoli robot
Per verificare se questi cambiamenti fossero vantaggiosi, i ricercatori hanno confrontato Red-YOLO sia con sistemi di rilevamento più vecchi e pesanti sia con una serie di varianti YOLO leggere moderne. I modelli tradizionali a più fasi, sebbene potenti, erano semplicemente troppo lenti e assetati di risorse per i robot compatti da frutteto. Diverse versioni più recenti di YOLO si sono comportate meglio ma hanno avuto difficoltà con grappoli piccoli, parzialmente nascosti o con sfondi affollati, spesso perdendo frutti o scambiando foglie per peperoni. Red-YOLO ha raggiunto un equilibrio migliore: ha rilevato i grappoli di pepe con maggiore accuratezza e richiamo rispetto a tutti i modelli di confronto, mantenendo la dimensione del modello sotto i tre milioni di parametri e il carico computazionale abbastanza basso per processori embedded. I test in scene di frutteto variegate hanno mostrato che Red-YOLO trovava costantemente i grappoli anche quando i frutti erano piccoli, in ombra o fortemente sovrapposti.
Dal modello di laboratorio all’aiutante in frutteto
Per i non specialisti, il risultato chiave è pratico: questo lavoro dimostra che un sistema di visione compatto e accuratamente messo a punto può fornire ai piccoli robot raccoglitori un “occhio” affidabile sul campo. Con Red-YOLO, un robot può selezionare automaticamente se sta trattando un grappolo compatto o diffuso e adattare la dimensione e la forza della pinza prima della raccolta, riducendo i danni e risparmiando lavoro. Sebbene lo studio attuale si concentri su una varietà di pepe in una singola regione, lo stesso approccio — costruire dataset mirati e perfezionare modelli di rilevamento snelli — potrebbe essere esteso ad altre colture speciali. Man mano che questi sistemi di visione diventano più robusti e largamente adottati, potrebbero rendere la raccolta più veloce, sicura e costante, assicurando un approvvigionamento stabile dei peperoni che danno sapore ad alcuni dei piatti più amati al mondo.
Citazione: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
Parole chiave: raccolta robotica, rilevazione del pepe, computer vision, YOLO leggero, agricoltura intelligente