Clear Sky Science · it
Sviluppo di un robot assistente per pazienti con navigazione autonoma migliorata tramite ottimizzazione dei percorsi nei reparti ospedalieri
Robot che aiutano gli infermieri, non li sostituiscono
Gli ospedali di tutto il mondo sono sotto pressione: sempre più pazienti anziani, più malattie croniche e personale che arriva al limite. Questo studio descrive un robot intelligente per l’assistenza ai pazienti progettato non per sostituire l’infermieristica, ma per occuparsi silenziosamente delle attività ripetitive di monitoraggio e dei controlli notturni nei reparti. Muovendosi in modo sicuro e affidabile in autonomia, questo robot potrebbe aiutare gli infermieri a individuare emergenze prima—come cadute o febbri improvvise—alleggerendo il loro carico di lavoro e riducendo il rischio di incidenti in corridoi affollati e passaggi stretti.
Perché i corridoi ospedalieri sono difficili per i robot
A un primo sguardo, un corridoio ospedaliero sembra semplice: linee dritte, pavimenti puliti, porte regolari. Per un robot, non è affatto così. Letti, carrelli, pareti e soprattutto stipiti stretti creano spazi ristretti dove anche un piccolo errore può causare una collisione. Molti robot ospedalieri esistenti fanno affidamento su un insieme di sensori e hardware complessi per far fronte a questo. Il team dietro questo studio ha seguito una strada diversa: ha progettato un robot in grado di muoversi in sicurezza utilizzando un unico sensore principale—un laser scanner bidimensionale che misura le distanze intorno—a cui è affiancato un modo più intelligente di pianificare i percorsi.

Costruire un paio di occhi in più per l’infermiere
I ricercatori hanno sviluppato un robot intelligente per l’assistenza ai pazienti (SPCR) basandosi su una piattaforma commerciale a ruote. Sul corpo hanno montato una camera 3D per individuare cadute e rilevare segni vitali senza toccare il paziente, e un sensore laser 2D in alto per scansionare continuamente l’ambiente in un cerchio completo. All’interno del robot trovano posto un computer embedded, batterie, controller dei motori ed elettronica di comunicazione che gli permettono di dialogare con un’app di controllo e prendere decisioni di guida autonome. Il robot può muoversi in tutte le direzioni, inclinare un braccio con la telecamera per osservare i pazienti ed è progettato per operare per diverse ore in condizioni ospedaliere reali.
Una mappa più intelligente anziché più hardware
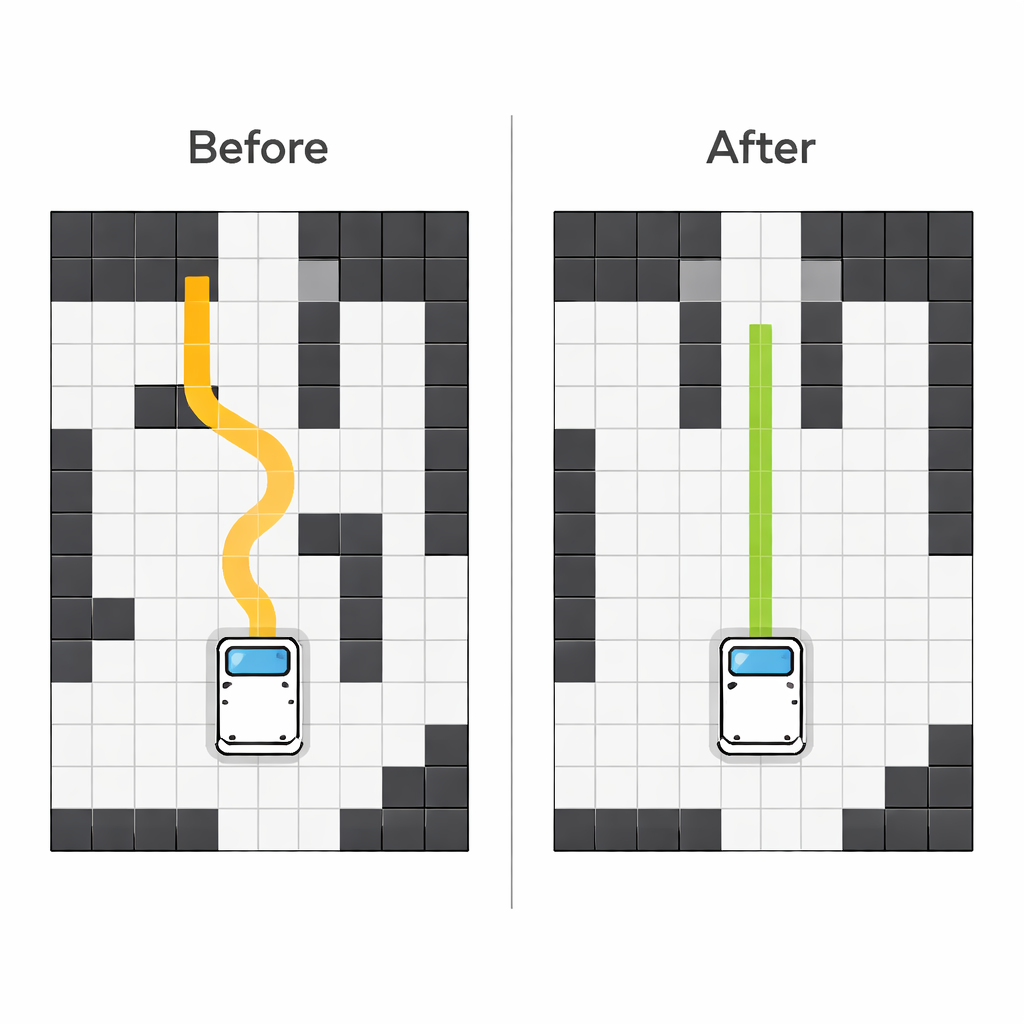
Per navigare, il robot ha prima bisogno di una mappa che indichi dove può e non può andare. Il team è partito da disegni precisi di un corridoio ospedaliero e li ha convertiti in una mappa a griglia, dove ogni piccola cella è etichettata come spazio libero, muro o ostacolo. Invece di lasciare la mappa così com’era, l’hanno rimodellata per essere più cauta della realtà. Hanno introdotto “spazi di ostacolo virtuali”—aree aggiuntive bloccate che spingono dolcemente il robot lontano da punti a rischio come gli stipiti delle porte e gli angoli stretti. Il software di pianificazione del percorso, basato su una versione migliorata dell’algoritmo D* Lite, ricerca quindi su questa mappa più sicura rotte che evitano svolte brusche e mantengono il robot più vicino al centro dei passaggi stretti.
Mettere il robot alla prova nei reparti reali
Il sistema è stato testato in un corridoio ospedaliero reale suddiviso in tre sezioni con diverse combinazioni di corridoi, porte e ostacoli. Il robot doveva viaggiare tra punti di controllo, passare attraverso porte standard larghe 90 centimetri ed evitare pareti e oggetti fissi. Poiché il robot è largo circa 76 centimetri, aveva solo pochi centimetri di margine di manovra ai lati quando attraversava le porte—condizioni in cui molti robot faticano. Confrontando le prestazioni prima e dopo l’aggiustamento della mappa a griglia, i ricercatori hanno riscontrato che il tasso di successo del robot nel completare i percorsi senza toccare nulla è aumentato di oltre il 30 percento in tutte le sezioni, con percorsi più fluidi e meno manovre non necessarie.
Cosa significa per la futura assistenza ai pazienti
Per i non specialisti, il messaggio chiave è semplice: invece di sovraccaricare i robot con sensori sempre più numerosi, questo studio dimostra che una progettazione digitale accurata delle mappe e una pianificazione dei percorsi più intelligente possono rendere i robot ospedalieri sia più sicuri che più pratici. Un robot in grado di attraversare affidabilmente porte strette di notte, seguire percorsi efficienti e controllare silenziosamente i parametri di base dei pazienti potrebbe liberare gli infermieri per concentrarsi sulla cura umana—confortare le famiglie, prendere decisioni complesse e gestire le emergenze. Gli autori considerano questo lavoro una base: le versioni future aggiungeranno più sensori e funzionalità di monitoraggio dei pazienti più ricche, con l’obiettivo di assistenti robotici affidabili attivi 24 ore su 24 che si muovono in sicurezza negli ambienti ospedalieri reali.
Citazione: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Parole chiave: robot ospedalieri, navigazione autonoma, monitoraggio dei pazienti, mappatura LiDAR, pianificazione del percorso