Sul fondale, i veicoli subacquei autonomi fungono da nostri occhi e orecchie per la ricerca sul clima, l'ispezione delle infrastrutture e le operazioni di soccorso. Tuttavia questi sommergibili robotici si scontrano con un problema fondamentale: comunicare e ragionare in modo chiaro in un ambiente ostile dove i segnali sono lenti, rumorosi e l'energia è scarsa. Questo articolo presenta un nuovo approccio per aiutare i robot subacquei a comunicare, individuare oggetti e restare sicuri combinando realtà aumentata e virtuale con un ramo dell'intelligenza artificiale chiamato apprendimento per rinforzo.
Perché la comunicazione subacquea è così difficile
Trasmettere dati sott'acqua è molto più complesso che farlo nell'aria. Le onde radio, che alimentano Wi‑Fi e 5G, vengono rapidamente assorbite dall'acqua di mare. I segnali acustici viaggiano più lontano ma offrono velocità di trasmissione molto basse e possono subire ritardi, echi o distorsioni. L'induzione magnetica funziona solo su decine di metri. I sistemi di controllo esistenti per robot subacquei spesso trattano questi canali separatamente e usano regole fisse per navigazione e sensing. Questo li rende lenti ad adattarsi quando le condizioni cambiano, spreca energia della batteria e lascia i collegamenti di comunicazione esposti a intercettazioni o attacchi.
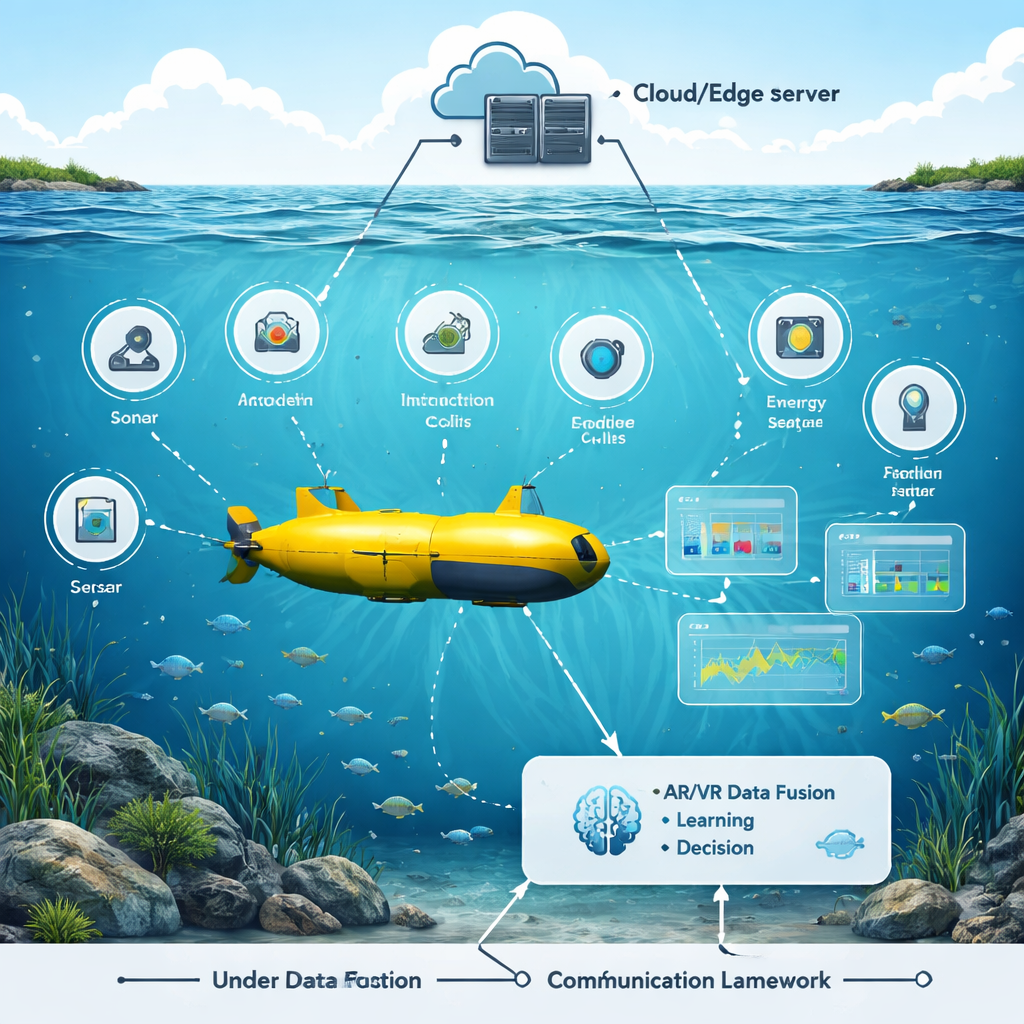
Un oceano virtuale per allenare migliori istinti Figure 1.
Gli autori hanno costruito un banco di prova in realtà aumentata e virtuale che ricrea un mondo subacqueo vivace: pesci in movimento, rocce, barche e boe, insieme a rumore realistico e perdita di segnale nell'acqua. Un veicolo subacqueo simulato attraversa questo ambiente usando numerosi sensori—sonar, telecamere, modem acustici, misuratori di energia e tracciatori di posizione. Nella scena virtuale i ricercatori possono spostare controlli per cambiare la posizione degli oggetti, le condizioni dell'acqua e le impostazioni dei sensori, e vedere immediatamente come risponde il robot. Questo strato AR/VR non è solo estetica; fonde i feed grezzi dei sensori in un quadro 3D unificato più semplice da comprendere e su cui un sistema di IA può agire.
Insegnare al robot ad apprendere dall'esperienza
Al centro del framework c'è una strategia di IA che gli autori chiamano Adaptive Augmented Reality and Reinforcement Learning Scheduling Strategy (AARLSS). Invece di seguire uno script fisso, il robot impara per tentativi ed errori nell'oceano virtuale. Ogni istante osserva il suo stato sensoriale fuso, sceglie un'azione (come cambiare rotta, regolare la frequenza di campionamento dei sensori o commutare tra comunicazioni a corto e lungo raggio) e riceve una ricompensa. Questa ricompensa bilancia quattro obiettivi: risparmiare energia, ridurre i ritardi, abbassare il rischio per la sicurezza e usare meno risorse di calcolo e di rete. Una rete deep Q‑learning memorizza e aggiorna il valore atteso delle diverse decisioni, usando mini-batch di esperienze passate conservate in una memoria di replay in modo che il robot possa apprendere sia da situazioni recenti che più datate.
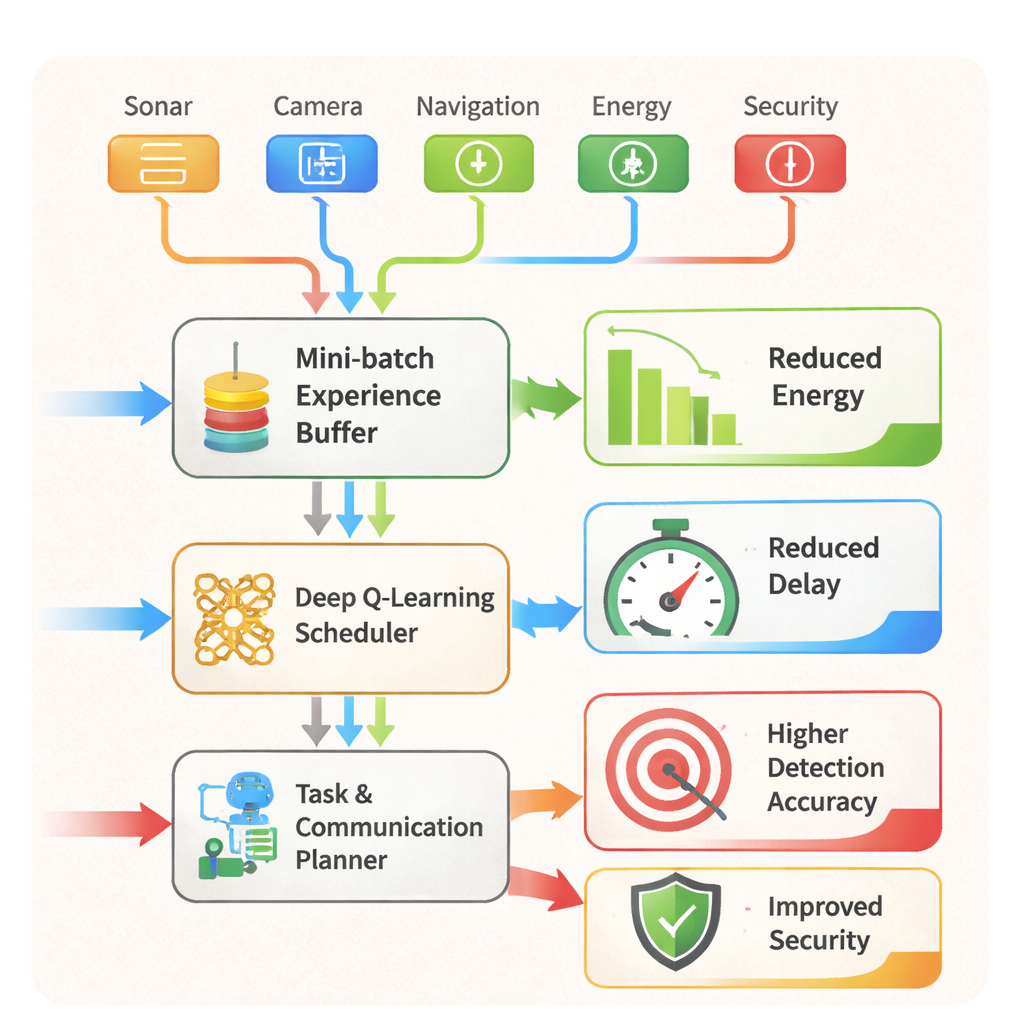
Dalla pianificazione intelligente a missioni più sicure Figure 2.
AARLSS funziona anche come un pianificatore in tempo reale. Decide quali compiti—navigazione, rilevamento degli oggetti, comunicazione o controlli di sicurezza—dovrebbero essere eseguiti dove e quando, e se i dati debbano essere elaborati a bordo del robot, scaricati su un server edge o ritardati. Inoltre, un sistema integrato di rilevamento delle intrusioni analizza continuamente i modelli nei dati dei sensori e di rete per segnalare anomalie che potrebbero indicare un attacco o un malfunzionamento, e può attivare azioni protettive come il blocco di collegamenti rischiosi o la forzatura dell'elaborazione locale. Nei test nel simulatore AR/VR, il framework ha superato diversi metodi consolidati di apprendimento per rinforzo. Ha ridotto del circa 20% il consumo energetico del veicolo subacqueo, diminuito i ritardi di comunicazione e delle attività di circa il 18–20% e portato l'accuratezza del rilevamento degli oggetti a circa il 97–98%, anche durante manovre complesse e in scene affollate.
Cosa significa per gli oceani reali
Per i non specialisti, il messaggio chiave è che questa ricerca indica robot subacquei più indipendenti, efficienti e affidabili. Allenandosi in un oceano virtuale ricco e imparando a bilanciare energia, tempo, accuratezza e sicurezza contemporaneamente, AARLSS permette a un veicolo di scegliere quando parlare, quando ascoltare e quando restare in silenzio per risparmiare energia—tutto mantenendo un attento monitoraggio dell'ambiente e proteggendo i propri dati. Sebbene questi risultati provengano da un simulatore sofisticato piuttosto che dall'acqua aperta, suggeriscono che future flotte di robot subacquei potrebbero affrontare missioni più lunghe, più sicure e più ricche di dati con meno supervisione umana, migliorando tutto, dalla scienza marina alle ispezioni dell'industria offshore.
Citazione: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle.
Sci Rep16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3
Parole chiave: robotica subacquea, veicoli subacquei autonomi, apprendimento per rinforzo, realtà aumentata, comunicazione subacquea