Clear Sky Science · it
Controllo predittivo basato su apprendimento per rinforzo per l’ottimizzazione di motori sincroni a magneti permanenti contro-rotanti nei sistemi di propulsione sottomarini
Motori più intelligenti per sottomarini più discreti
I sottomarini moderni fanno affidamento su sistemi di propulsione silenziosi ed efficienti per esplorare gli oceani e svolgere missioni scientifiche, commerciali o di difesa. Questo studio analizza un particolare tipo di motore elettrico che aziona due eliche in direzioni opposte, aiutando il sottomarino a muoversi in modo fluido e silenzioso attraverso l’acqua. I ricercatori mostrano come combinare strumenti avanzati di predizione con un algoritmo di apprendimento possa mantenere questi motori stabili ed efficienti, anche quando onde, correnti e manovre improvvise li disturbano.
Due eliche, un sottomarino stabile
I sistemi tradizionali a singola elica possono provocare torsioni e rollii del sottomarino, specialmente ad alte velocità, rendendo la direzione più difficile da mantenere e aumentando la probabilità di essere individuati. Per evitarlo, gli ingegneri impiegano sistemi ad eliche contro-rotanti: due eliche montate sullo stesso albero ma che girano in direzioni opposte. Al centro di questa configurazione c’è il motore sincrono a magneti permanenti contro-rotante (CRPMSM), che in pratica è composto da due motori elettrici compatti ad alta coppia impilati insieme. Questa disposizione annulla le forze di torsione indesiderate, migliora l’utilizzo dell’energia e riduce il rumore, aspetti tutti cruciali per la furtività e le missioni prolungate sotto la superficie. Tuttavia, quando il carico sui due rotori diventa sbilanciato, per esempio in acqua turbolenta o durante virate brusche, mantenere entrambi i lati in perfetta armonia diventa una sfida di controllo seria. 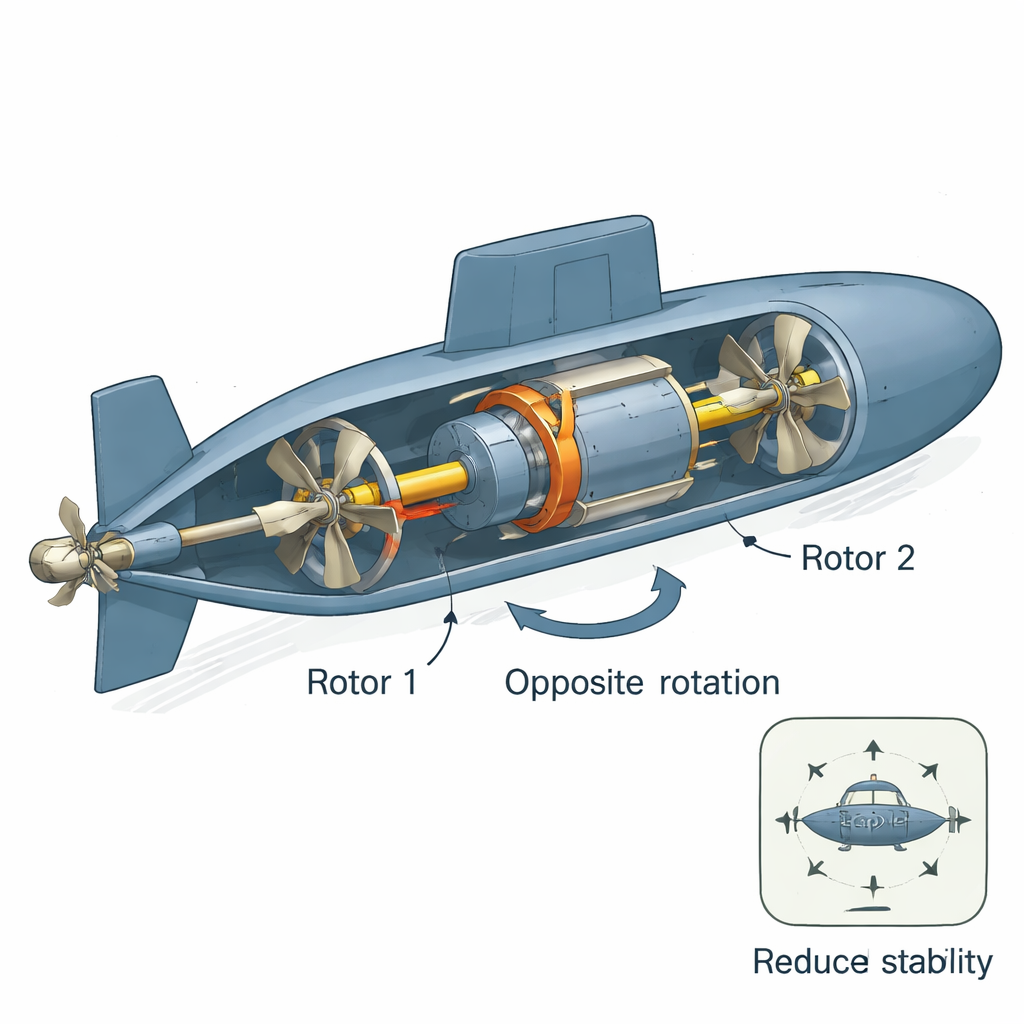
Perché i controlli convenzionali non bastano
Gli ingegneri hanno provato molte strategie di controllo per mantenere i rotori del CRPMSM sincronizzati ed efficienti. Metodi come il controllo orientato al campo e il controllo diretto della coppia funzionano bene in condizioni calme e prevedibili, ma faticano quando l’ambiente subacqueo cambia rapidamente o diventa fortemente non uniforme. Tecniche più sofisticate, come il controllo a sliding-mode, fuzzy e adattativo, migliorano la robustezza, ma spesso si basano su modelli matematici molto accurati del motore e dell’acqua circostante. In pratica, quei modelli non sono mai perfetti, e le discrepanze possono provocare un aumento delle fluttuazioni di coppia, una risposta più lenta al recupero dopo disturbi e sprechi di energia. Il Controllo Predittivo basato su Modello (MPC), che pianifica mosse di controllo ottimali su una breve finestra futura, offre una risposta rapida ma rimane fortemente dipendente dalla qualità del modello sottostante.
Un controllore ibrido che impara sul campo
Gli autori propongono un quadro ibrido di Controllo Predittivo basato su Modello guidato dall’Apprendimento per Rinforzo (RL-MPC) che combina i punti di forza di entrambi gli approcci. L’MPC usa un modello matematico del CRPMSM per prevedere come correnti, coppia e velocità evolveranno nei prossimi passi di controllo e sceglie comandi di tensione che dovrebbero seguire gli obiettivi desiderati di velocità e corrente rispettando i vincoli. Su questo livello, un agente di apprendimento per rinforzo basato sull’algoritmo Twin Delayed Deep Deterministic Policy Gradient (TD3) osserva il comportamento del motore reale. Ricevendo ricompense quando gli errori di velocità, gli errori di corrente e lo sforzo di controllo sono piccoli, l’agente di apprendimento aggiusta gradualmente gli output dell’MPC per compensare errori di modellazione, carichi sbilanciati e disturbi esterni. Una fase di modulazione a larghezza d’impulso vettoriale (space-vector pulse-width modulation) converte poi questi comandi di tensione ottimizzati in segnali di commutazione per l’inverter che alimenta il motore.
Mettere alla prova il motore intelligente
Per valutare il loro approccio, i ricercatori hanno costruito una simulazione dettagliata di un sistema motore contro-rotante da 120 kW in MATLAB/Simulink e l’hanno testata in tre scenari operativi realistici. Nel primo, il motore funzionava a velocità costante mentre il carico su entrambi i rotori variava ma restava bilanciato; nel secondo, la velocità veniva variata con carico costante; nel terzo, il caso più impegnativo, i rotori erano soggetti a carichi differenti mentre il riferimento di velocità era fissato. In ogni caso, l’RL-MPC è stato confrontato direttamente con l’MPC convenzionale usando gli stessi orizzonti di predizione e controllo. 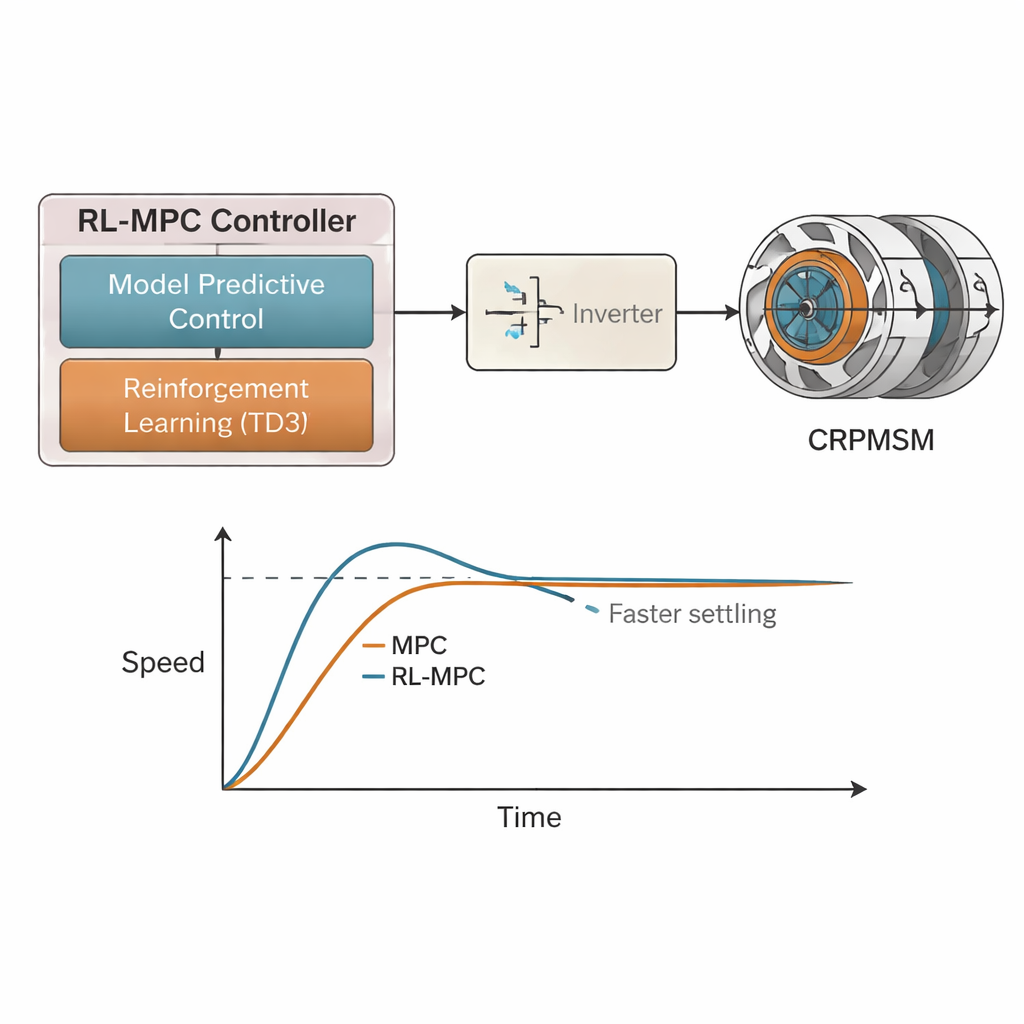
Risposta più rapida, correnti più pulite, migliore sincronizzazione
Il controllore ibrido RL-MPC ha costantemente superato l’MPC standard in tutti i test. Quando carichi o velocità cambiavano improvvisamente, l’RL-MPC ha ridotto il sovraelongazione della velocità da circa il 30% a circa il 15–16,6% e ha dimezzato il tempo di assestamento da circa 1,4 secondi a 0,7 secondi. Le fluttuazioni di coppia erano più contenute e i due rotori contro-rotanti sono rimasti strettamente sincronizzati, anche quando un rotore era più caricato dell’altro. Altrettanto importante, la qualità delle correnti statoriche è migliorata significativamente: la distorsione armonica totale è diminuita di oltre il 60% durante transitori severi da carico sbilanciato, scendendo dal 9,3% dell’MPC al 3,4% dell’RL-MPC, e fino a circa il 2–3% in regime permanente. Correnti più pulite significano meno riscaldamento, funzionamento più silenzioso e una maggiore efficienza complessiva.
Cosa significa per i veicoli subacquei del futuro
Per un pubblico non specialista, il messaggio principale è che aggiungere un livello di apprendimento sopra un controllore predittivo rende i motori sottomarini sia più intelligenti sia più resilienti. Invece di affidarsi solo a equazioni fisse che possono fallire quando il mare si agita o il veicolo compie manovre brusche, il framework RL-MPC può adattarsi in tempo reale, mantenendo il motore a doppio rotore sincronizzato, reattivo ed efficiente. Sebbene i risultati finora si basino su simulazioni e debbano essere convalidati su hardware reale e in condizioni oceaniche reali, questo lavoro indica una direzione per veicoli subacquei futuri che percorrano distanze maggiori con la stessa energia, producano meno rumore e rimangano stabili e controllabili in condizioni difficili.
Citazione: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Parole chiave: propulsione sottomarina, motore contro-rotante, controllo tramite apprendimento per rinforzo, controllo predittivo basato su modello, veicoli subacquei