Clear Sky Science · it
Algoritmo A* direzionale e auto‑adattivo con euristica PPO per la pianificazione dei percorsi di UAV nelle smart city
Rotte più intelligenti per i droni cittadini
Immaginate flotte di piccoli droni di consegna che si fanno strada tra i grattacieli, portando farmaci, pacchi o forniture d’emergenza attraverso una città trafficata. Per volare in modo sicuro e veloce, ogni drone deve decidere continuamente quale direzione prendere. Questo articolo presenta un nuovo metodo per consentire ai droni di trovare rotte migliori negli affollati spazi tridimensionali urbani, rendendo i percorsi più brevi, più fluidi e più affidabili rispetto ai metodi tradizionali.

Perché trovare un buon percorso è così difficile
Per un drone scegliere un percorso non significa tracciar semplicemente una linea retta dal punto A al punto B. Deve evitare edifici, alberi e zone vietate al volo rispettando limiti di virata e di altitudine. I metodi classici di pianificazione del percorso, come il ben noto algoritmo A*, funzionano bene su mappe semplici ma faticano in scenari urbani 3D realistici. Spesso valutano troppi possibili passi successivi, sprecano risorse di calcolo e possono generare rotte a zig‑zag più lunghe del necessario o addirittura fallire quando l’ambiente è molto denso. Con l’aumentare della complessità delle smart city, queste debolezze diventano un serio collo di bottiglia per un traffico aereo sicuro ed efficiente.
Un aggiornamento direzionale a uno strumento classico
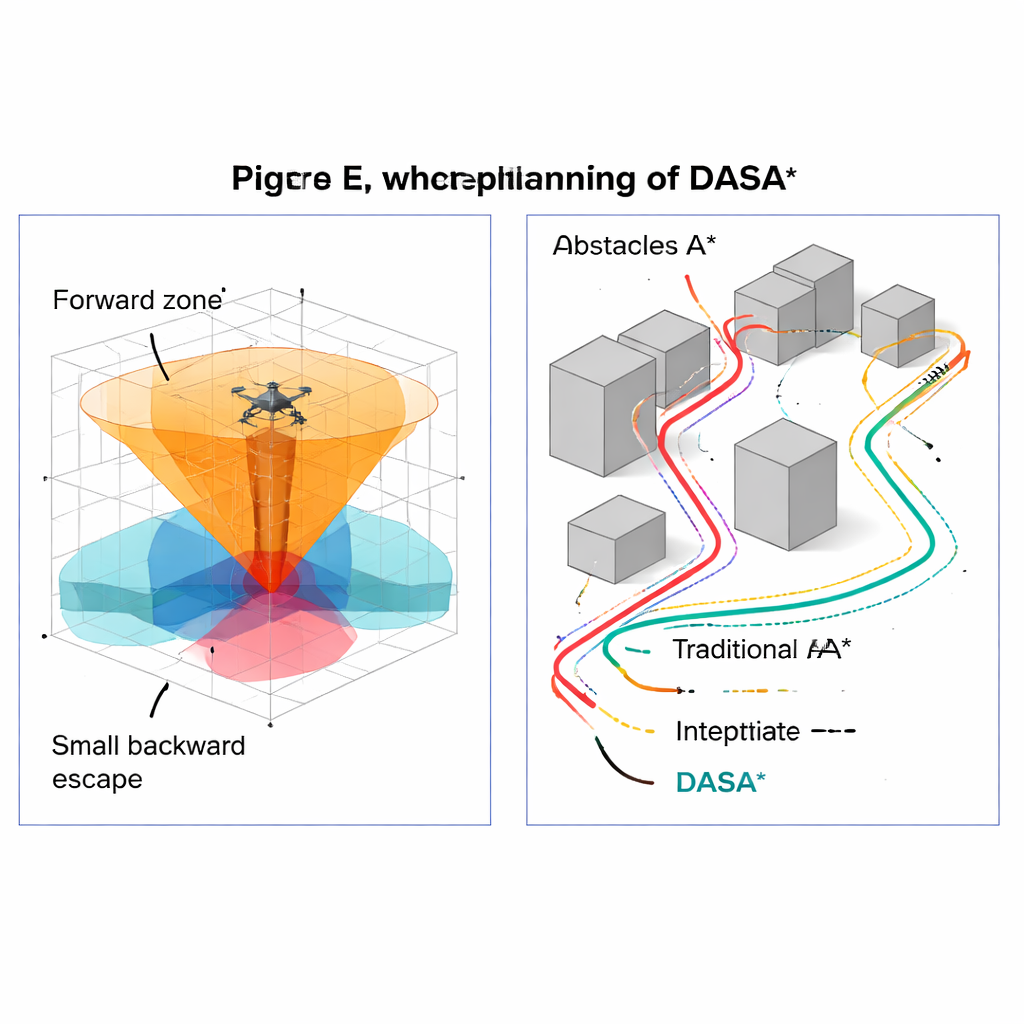
Gli autori partono dall’algoritmo A* e propongono una versione migliorata chiamata DASA* (Direction‑Aware and Self‑Adaptive A*). Invece di guardare ciecamente in tutte le direzioni attorno al drone, DASA* presta attenzione a dove si trova l’obiettivo. Classifica le posizioni candidate vicine in tre strati: quelle principalmente davanti al drone verso l’obiettivo, quelle ai lati e un piccolo insieme dietro di esso che può aiutare a uscire dai vicoli ciechi. Un semplice rilevatore di stallo monitora i segnali che indicano che la ricerca si sta «bloccando» e allarga automaticamente l’esplorazione da un cono stretto anteriore a un vicinato più ampio quando necessario. Questa espansione mirata e allineata all’obiettivo riduce le esplorazioni inutili pur garantendo che verrà trovato un percorso valido se esiste.
Adattarsi a spazi affollati e aperti
Un’altra caratteristica chiave di DASA* è che modifica la sua “passata” a seconda dell’ambiente circostante. Quando il drone è lontano dagli ostacoli, l’algoritmo compie passi più grandi, coprendo rapidamente lo spazio aperto. Avvicinandosi a edifici o altri pericoli, passa a passi più piccoli, permettendo manovre precise in spazi ristretti. Questo «livello di zoom» variabile consente al pianificatore di muoversi velocemente dove è sicuro e rallentare solo dove la precisione conta. Dopo che viene trovato un percorso grezzo, una fase dedicata di aggiustamento rimuove waypoint inutili e adatta una curva liscia attraverso i punti chiave rimanenti. Il risultato è una rotta che non solo evita collisioni, ma assomiglia anche di più a un percorso di volo naturale che un pilota esperto sceglierebbe, con meno virate improvvise.
Insegnare all’algoritmo a guardare avanti
L’A* tradizionale si basa su formule di distanza semplici per stimare quanto ogni posizione sia distante dall’obiettivo. DASA* sostituisce questa approssimazione con una guida appresa basata su Proximal Policy Optimization (PPO), una tecnica moderna di reinforcement learning. In un ambiente di addestramento, un agente virtuale esercita ripetutamente il movimento verso un bersaglio in spazio 3D mentre rileva distanze, differenze di quota e informazioni direzionali. Una rete neurale impara gradualmente quanto promettente sia ciascuna situazione e, dopo l’addestramento, funge da «modulo d’intuizione» plug‑in per DASA*. Questa euristica appresa indirizza la ricerca più direttamente verso buone soluzioni, specialmente in configurazioni complesse dove la semplice distanza in linea retta è fuorviante.
Quanto è efficace nelle città virtuali
I ricercatori hanno testato DASA* in molteplici scenari 3D di città simulate piene di edifici a forma di scatola e ostacoli cilindrici che imitano strutture urbane reali. L’hanno confrontato con l’A* classico e diverse alternative popolari, incluse versioni migliorate di rapidly‑exploring random trees, swarm di particelle, differential evolution e un’altra variante di A* chiamata Theta*. In molti casi di test, DASA* ha costantemente trovato percorsi più corti, ha espanso molti meno punti candidati ed è stato molto più veloce—spesso da 10 a 50 volte più rapido dell’A* standard. Ha mantenuto inoltre un tasso di successo perfetto o quasi anche in ambienti densi e labirintici, mentre alcuni metodi concorrenti fallivano più spesso o producevano lunghi deviazioni a loop.
Cosa significa per la vita di tutti i giorni
In termini semplici, DASA* offre ai robot volanti un migliore senso della direzione e del giudizio. Concentrandosi su direzioni promettenti, adattando il livello di dettaglio all’ambiente locale, usando un senso appreso di quanto sia vicina la riuscita e rifinendo la rotta finale, trasforma i dati grezzi della mappa in percorsi di volo efficienti, fluidi e pratici. Se adottato in sistemi reali, un approccio del genere potrebbe aiutare le future smart city a gestire consegne con droni, ispezioni e risposte d’emergenza in modo più sicuro e affidabile, anche con cieli più affollati e ambienti sempre più complessi.
Citazione: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
Parole chiave: Pianificazione percorsi UAV, droni per smart city, algoritmo A*, navigazione autonoma, pianificazione del moto robotico