Clear Sky Science · it
Strategia di controllo senza sensori per PMSM a velocità piena basata su osservatore super-twisting migliorato e ottimizzazione della transizione morbida
Mantenere i motori elettrici intelligenti senza hardware aggiuntivo
Dalle auto elettriche agli attuatori aeronautici, molte macchine moderne si basano su un particolare tipo di motore elettrico chiamato motore sincrono a magneti permanenti (PMSM). Questi motori sono efficienti e potenti, ma di norma richiedono sensori delicati per monitorare la velocità di rotazione e la posizione del rotore. I sensori aumentano i costi e possono guastarsi in ambienti difficili. Questo studio esplora come far funzionare questi motori in modo fluido e preciso su tutta la gamma di velocità senza utilizzare alcun sensore meccanico.
Perché eliminare i sensori è così difficile
In un tipico azionamento PMSM, piccoli sensori di posizione sono montati sull’albero del motore per segnalare al sistema di controllo l’esatta posizione del rotore. Queste informazioni sono cruciali per immettere corrente negli avvolgimenti al momento giusto, come una spinta ben sincronizzata su una giostra in rotazione. Tuttavia, i sensori possono essere fragili, ingombranti e costosi. Gli ingegneri hanno da tempo cercato di sostituirli con metodi “senza sensori” che deducono la posizione del rotore dai segnali elettrici del motore stesso. Il problema è che nessun singolo metodo funziona bene a tutte le velocità. A bassa velocità i segnali elettrici utili sono deboli, mentre ad alta velocità le soluzioni semplici diventano rumorose e imprecise. Colmare questo divario senza scossoni, vibrazioni o perdita di controllo è stata una sfida persistente.
Due modi intelligenti per “ascoltare” il motore
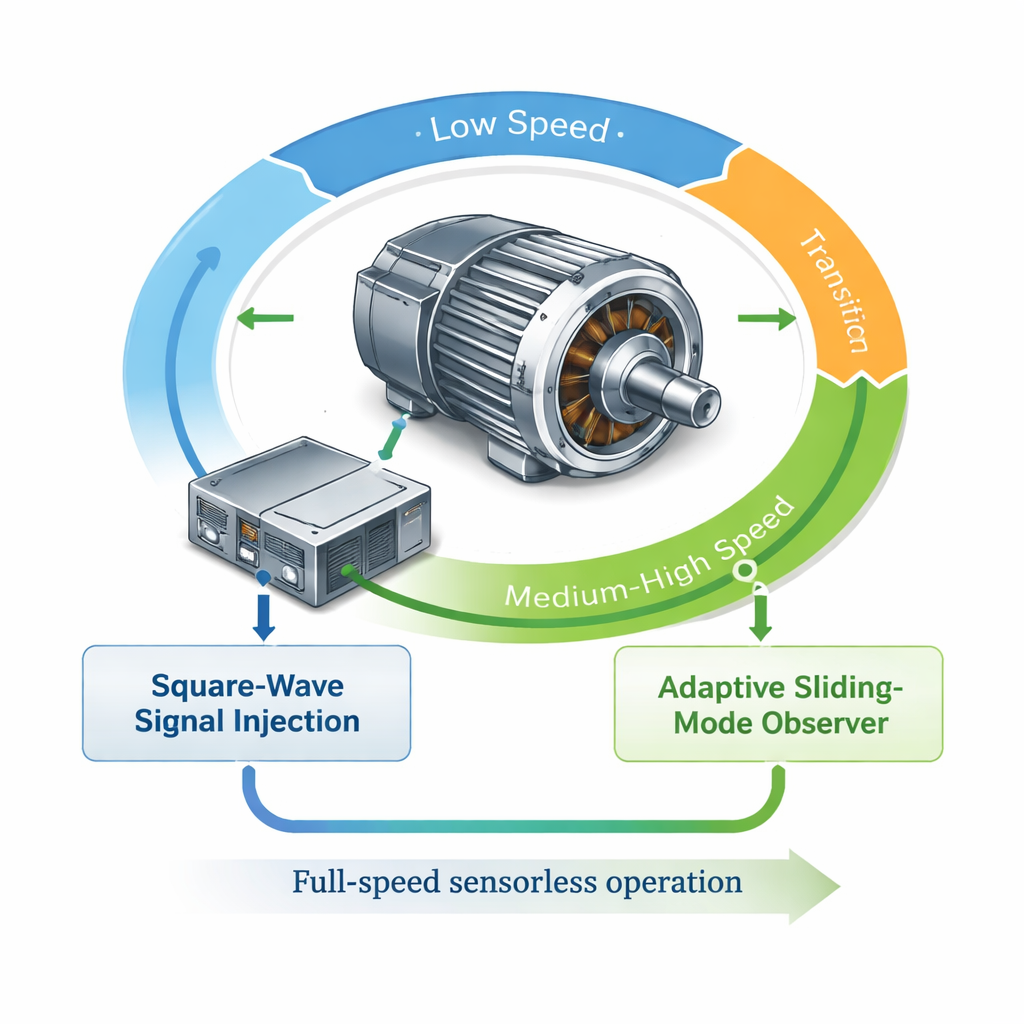
Per coprire l’intera gamma di velocità, gli autori combinano due tecniche sensorless complementari. A basse velocità, dove il feedback elettrico naturale del motore è troppo debole per essere misurato con affidabilità, si inietta deliberatamente negli avvolgimenti un segnale di tensione rapido a forma quadra. Il motore risponde in modo differente a seconda dell’angolo del rotore, così esaminando la corrente ad alta frequenza risultante il controllore può dedurre la posizione del rotore. Questo approccio di “iniezione ad alta frequenza” agisce come un segnale di sonda che invia un’eco da leggere. A velocità medio-alte, il motore produce un feedback naturale più forte, noto come forza controelettromotrice (back-EMF). Qui il team utilizza un osservatore matematico avanzato che segue il comportamento del motore e stima posizione e velocità del rotore a partire dalle tensioni e correnti misurate.
Rendere l’osservatore digitale più intelligente e più silenzioso
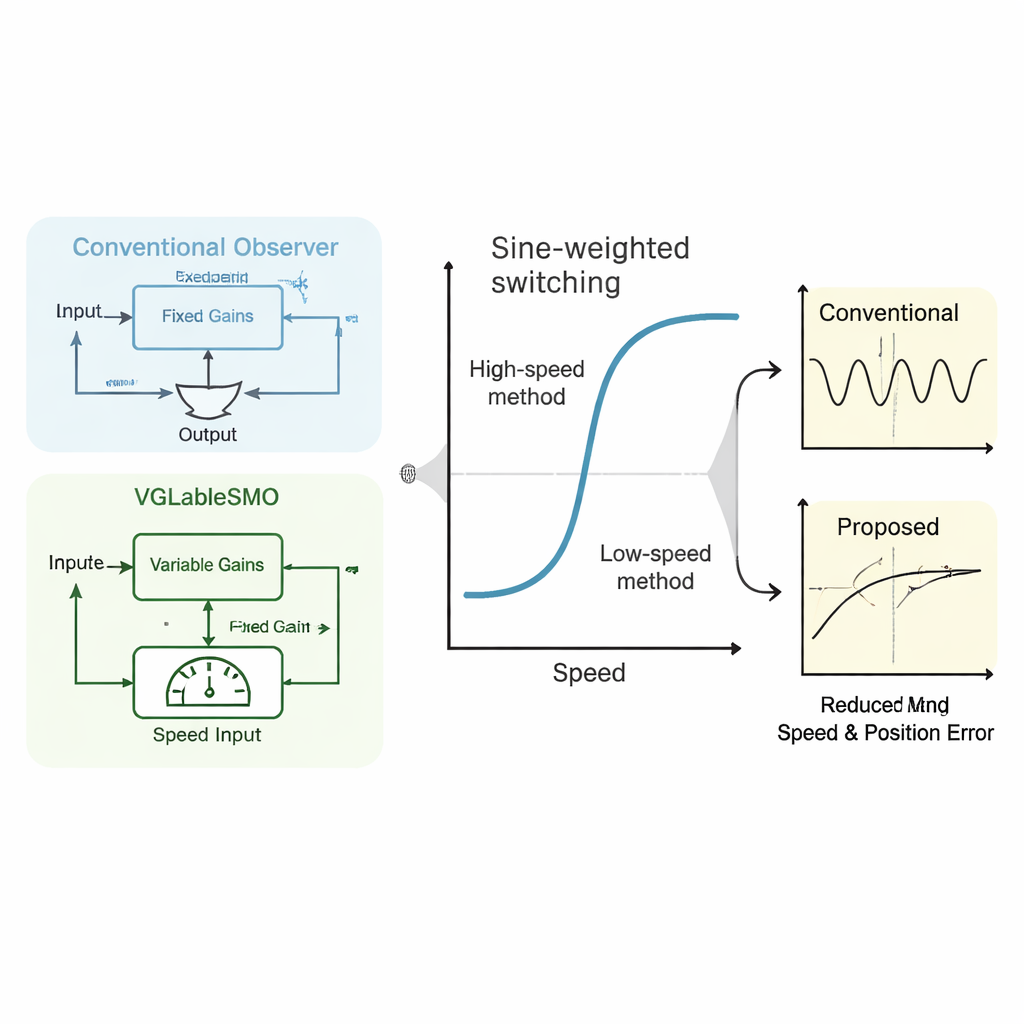
L’innovazione centrale sul lato ad alta velocità è un osservatore potenziato chiamato osservatore a modalità scorrevole lineare super-twisting a guadagno variabile (VGLSTSMO). Gli osservatori a modalità scorrevole tradizionali sono apprezzati per la robustezza rispetto a rumore e disturbi, ma soffrono spesso di “chattering”, piccole oscillazioni rapide che possono propagarsi nel torque e nella velocità. Inoltre si basano su impostazioni interne fisse che possono funzionare bene in una condizione operativa e male in un’altra. L’osservatore proposto regola automaticamente i propri guadagni interni al variare della velocità del motore e aggiunge un termine correttivo che avvicina dolcemente le stime ai valori reali. Un meccanismo adattivo affinando ulteriormente la stima della tensione interna del motore migliora la precisione sia della velocità sia della posizione. Le simulazioni al calcolatore mostrano che questo osservatore più intelligente riduce l’errore di posizione a velocità medio–alte da circa 0,9 radianti a circa 0,2 radianti e abbrevia il tempo di assestamento del sistema dopo una variazione di carico.
Smussare lo scambio tra basse e alte velocità
L’impiego di due diversi metodi di stima solleva un altro problema: come effettuare il trasferimento in modo fluido mentre il motore accelera. Un approccio semplice è dissolvere un metodo e introdurre l’altro usando una ponderazione lineare, ma ciò può comunque causare scossoni nel torque e nella velocità. Gli autori propongono una funzione di ponderazione più dolce, a forma di seno. All’interno di una banda di transizione scelta, il sistema di controllo sposta gradualmente la fiducia dal metodo a bassa velocità all’osservatore ad alta velocità seguendo una curva ondulatoria morbida anziché una rampa netta. Questa miscela raffinata riduce in modo significativo i salti di velocità e gli errori angolari durante il cambio, diminuendo l’errore angolare transitorio e dimezzando il tempo necessario perché gli errori si assestino.
Cosa significa per le macchine nel mondo reale
In sintesi, la strategia combinata — sondare il motore a bassa velocità, usare un osservatore adattivo a velocità più elevate e passare tra i due con una ponderazione seno morbida — fornisce un controllo stabile e preciso su tutta la gamma di velocità senza sensori meccanici. Nelle simulazioni, il metodo proposto mantiene ridotti sovraelongazioni di velocità ed errori stazionari evitando il chattering aggressivo che può causare rumore, usura e fastidio. Per le applicazioni quotidiane ciò significa che veicoli elettrici, azionamenti industriali e sistemi di propulsione potrebbero diventare più affidabili, più compatti e meno costosi da realizzare, mantenendo al contempo un controllo di movimento preciso senza dipendere da sensori fragili montati sull’albero.
Citazione: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Parole chiave: controllo motore senza sensori, motore sincrono a magneti permanenti, osservatore a modalità scorrevole, iniezione di segnale ad alta frequenza, sistemi di azionamento elettrico