Clear Sky Science · it
Influenza dei parametri strutturali sullo spazio operativo dei robot paralleli delta e ottimizzazione dell’adattabilità del percorso per applicazioni di selezione delle foglie di tè fresche
I robot entrano nella fabbrica del tè
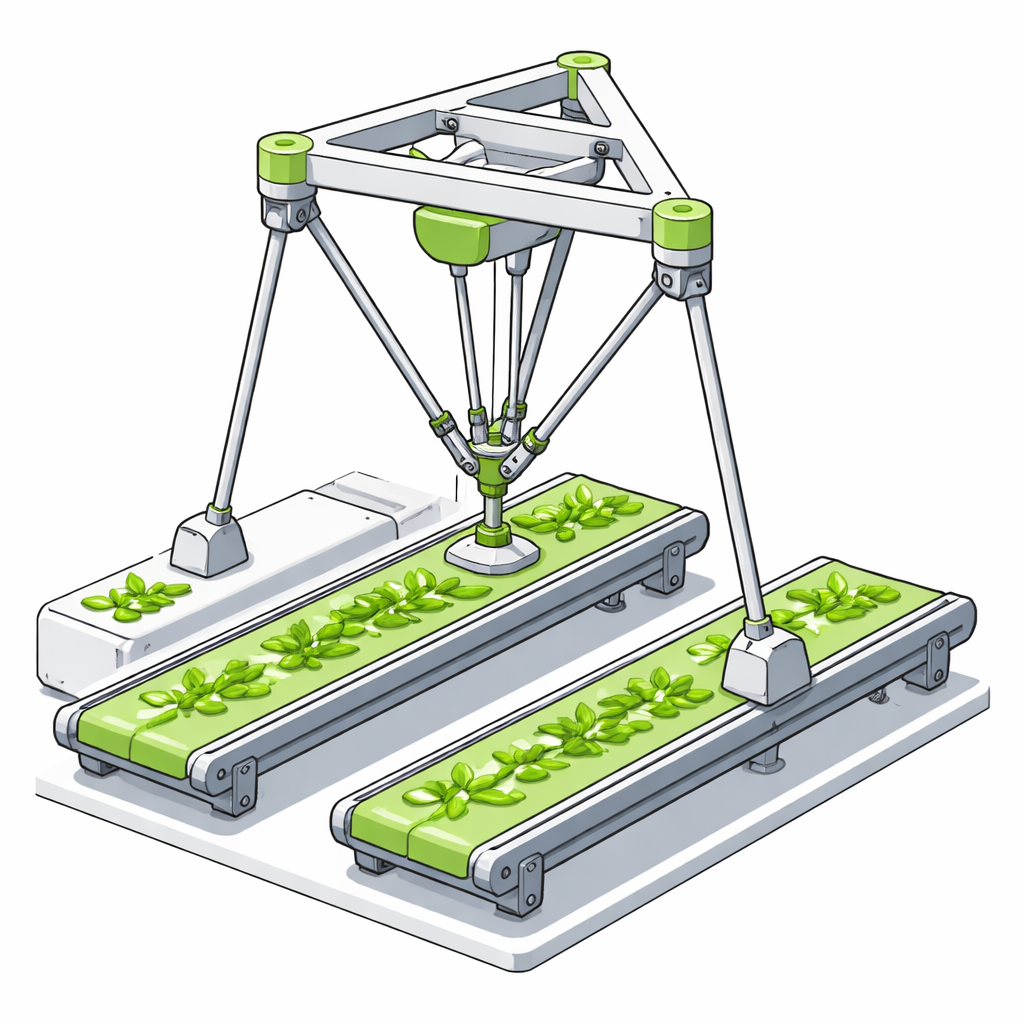
Le foglie di tè fresche sono delicate: schiacciare un germoglio o ammaccare una foglia compromette il prodotto finale. Tuttavia, classificare queste foglie a mano è un lavoro faticoso e lento. Questo articolo esplora come un robot industriale veloce e leggero—chiamato robot Delta—possa essere tarato per muoversi rapidamente e con precisione sulle nastri trasportatori del tè, gestendo le foglie in modo delicato e affidabile.
Perché le foglie di tè richiedono un trattamento speciale
Nel processo moderno del tè, la selezione delle foglie fresche è fondamentale per qualità e prezzo. I lavoratori umani faticano a mantenere il ritmo e la coerenza, soprattutto durante turni prolungati. I robot Delta, ampiamente usati per l’imballaggio ad alta velocità, sembrano una soluzione naturale: sono rigidi, precisi e possono muoversi a notevole velocità. Tuttavia, la maggior parte dei progetti precedenti era pensata per oggetti generici come scatole o dadi, non per germogli fragili confinati in una zona stretta tra due nastri. Lo “spazio operativo” del robot—la regione tridimensionale che può raggiungere—deve corrispondere a quest’area ristretta e seguire un movimento a forma di portale: afferrare, sollevare, traslare e posare, tutto senza urtare le proprie parti o mancare il bersaglio.
Come la forma del robot controlla dove può arrivare
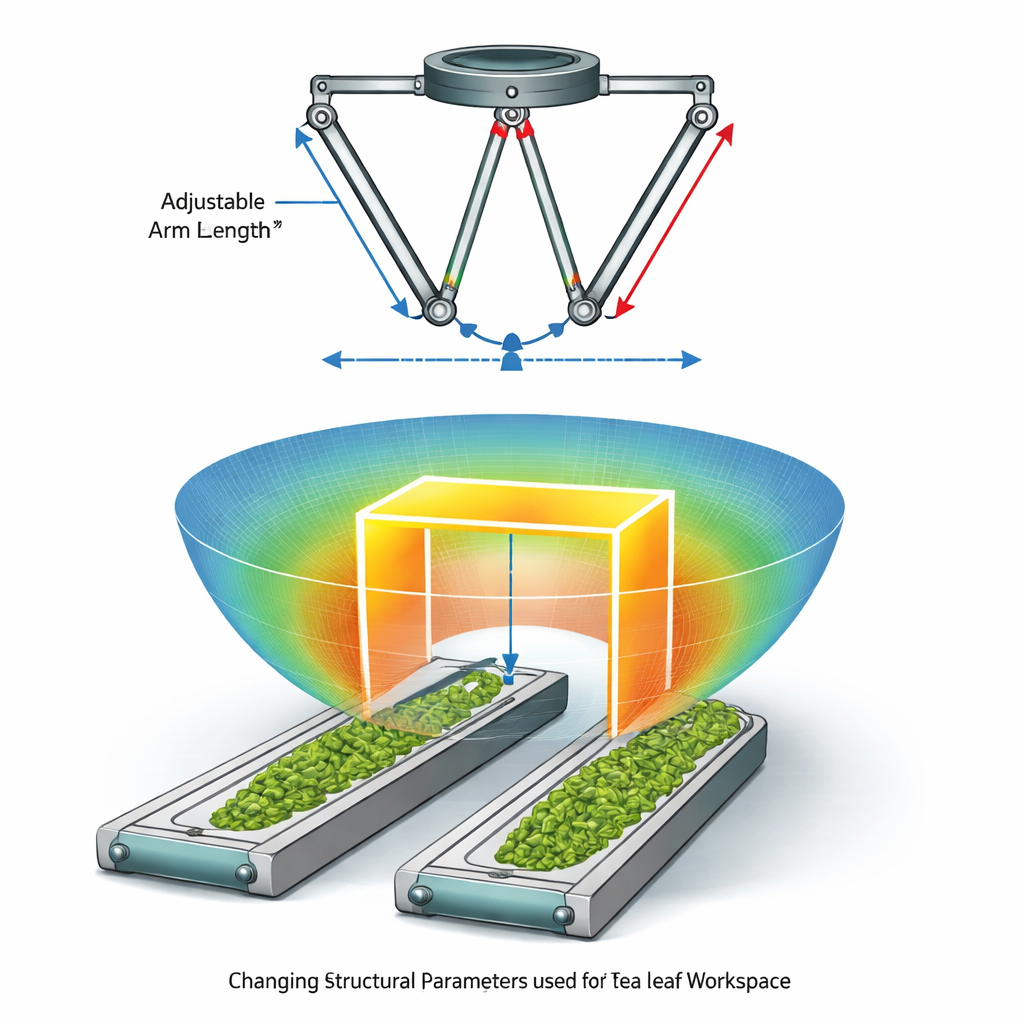
Gli autori iniziano costruendo una descrizione matematica dettagliata del moto del robot Delta. Collegano gli angoli dei suoi tre giunti motorizzati alla posizione esatta della piccola piattaforma mobile che porta una ventosa. Utilizzando sia calcoli diretti (angoli → posizione) sia inversi (posizione → angoli), definiscono ogni punto che l’end-effector può fisicamente raggiungere quando gli angoli dei giunti sono limitati a un intervallo sicuro. Con queste equazioni implementate in MATLAB, simulano l’intero volume raggiungibile del robot e lo visualizzano da vari punti di vista come una nuvola di punti colorata a forma di ciotola. Questo spazio operativo funge poi da base per valutare se un dato progetto meccanico può seguire il percorso di selezione del tè.
Testare molti progetti con esperimenti virtuali
Invece di costruire diversi prototipi fisici, il team considera quattro scelte geometriche chiave come manopole di progetto: la lunghezza delle braccia superiori (L), la lunghezza delle braccia inferiori (l), il raggio del triangolo della base fissa (R) e il raggio del triangolo mobile (r). Usano un piano sperimentale ortogonale che campiona in modo efficiente combinazioni di questi quattro parametri a tre livelli ciascuno, producendo nove robot virtuali. Per ciascuno, il programma calcola il volume totale dello spazio operativo e mostra come questo si sovrappone a una scatola standardizzata a forma di portale alta 200 mm, larga 400 mm e profonda 200 mm. Ciò permette ai ricercatori di valutare non solo quanto è ampio ogni spazio operativo, ma anche se copre effettivamente la regione dove le foglie di tè scorrono sui nastri.
Individuare quali dimensioni contano di più
Confrontando i nove progetti simulati, lo studio classifica l’incidenza di ciascuna scelta strutturale sulla portata utilizzabile. Il vincitore indiscusso è la lunghezza delle braccia passive (inferiori): braccia inferiori più lunghe ampliano significativamente lo spazio operativo. Seguono le braccia attive (superiori), che aumentano anch’esse il raggio d’azione ma possono introdurre vibrazioni se troppo lunghe. Il raggio della base ha un effetto moderato; se la base è troppo ampia, le braccia mobili collidono più facilmente con il telaio, riducendo il volume realmente utilizzabile. Il raggio della piattaforma mobile ha l’effetto più debole, ma una piattaforma più piccola aiuta leggermente liberando spazio per il movimento delle braccia. Analisi di range e varianza mostrano che, sebbene alcuni insiemi di parametri diano il volume totale maggiore, non coprono necessariamente la stretta regione a forma di portale che è rilevante per la selezione del tè.
Un progetto che si adatta alla linea del tè
La configurazione più pratica si rivela non essere quella con il volume totale più grande, ma quella il cui spazio operativo avvolge in modo coerente la traiettoria a forma di portale. Una combinazione in particolare—braccia superiori da 250 mm, braccia inferiori da 400 mm, raggio della base di 90 mm e raggio della piattaforma mobile di 50 mm—copre completamente il percorso richiesto tra i due nastri trasportatori mantenendo il robot compatto e stabile. A un’altezza operativa intorno a 325 mm rispetto al piano di riferimento, il robot raggiunge la sua massima apertura utilizzabile, più che sufficiente per coprire entrambi i nastri e completare il ciclo afferra–solleva–trasla–posa senza uscire dall’area sicura.
Cosa significa questo per le future fabbriche del tè
Per i non specialisti, il messaggio chiave è che piccole variazioni nelle lunghezze degli arti di un robot e nelle dimensioni delle piattaforme possono determinare la differenza tra una macchina che si muove impressionante nello spazio aperto e una che lavora in modo affidabile su una linea di produzione reale. Quantificando come ciascun parametro strutturale modella il volume raggiungibile e la sua sovrapposizione con un percorso realistico a forma di portale, questo studio offre una ricetta per progettare robot Delta che selezionano le foglie di tè rapidamente, con precisione e con danni minimi. Lo stesso approccio può guidare robot personalizzati per altri alimenti o prodotti fragili dove velocità, precisione e manipolazione delicata devono essere soddisfatte simultaneamente.
Citazione: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Parole chiave: robot delta, selezione foglie di tè, spazio operativo del robot, pick-and-place, automazione industriale