Clear Sky Science · it
Sviluppo e valutazione di un sistema di posizionamento del paziente guidato dalla superficie per la terapia di cattura neutronica del boro
Mira più precisa per i neutroni che combattono il cancro
La terapia di cattura neutronica del boro (BNCT) è un trattamento oncologico promettente in grado di danneggiare selettivamente le cellule tumorali preservando gran parte del tessuto sano circostante. Perché questa precisione dia i suoi frutti, però, i medici devono collocare il paziente esattamente nella posizione corretta davanti a un fascio neutronico fisso—spesso entro un millimetro. Questo articolo descrive un nuovo sistema di posizionamento guidato da telecamere e robot progettato per rendere quella messa a punto delicata più rapida, più accurata e meno dipendente dalla manualità e dal giudizio dell’operatore.
Perché il posizionamento è così importante
A differenza di molte macchine radioterapiche moderne che possono ruotare attorno al paziente e rimodellare i loro fasci di raggi X, la BNCT si basa su una sorgente neutronica pesante e fissa con limitate possibilità di dirigere il fascio. A muoversi deve essere il paziente, non il fascio. Tradizionalmente il personale utilizza laser, segni sulla pelle e spostamenti manuali del lettino per ottenere la posizione corretta. Questo processo è lento, dipende fortemente dall’abilità dell’operatore e può lasciare piccoli errori di posizionamento che alterano la dose effettiva ricevuta dal tumore e dagli organi vicini. Man mano che i centri BNCT aprono per trattare tumori complessi di testa, collo e altre aree difficili da raggiungere, questi limiti diventano un ostacolo serio.
Un aiuto hi‑tech: telecamere, software e un robot
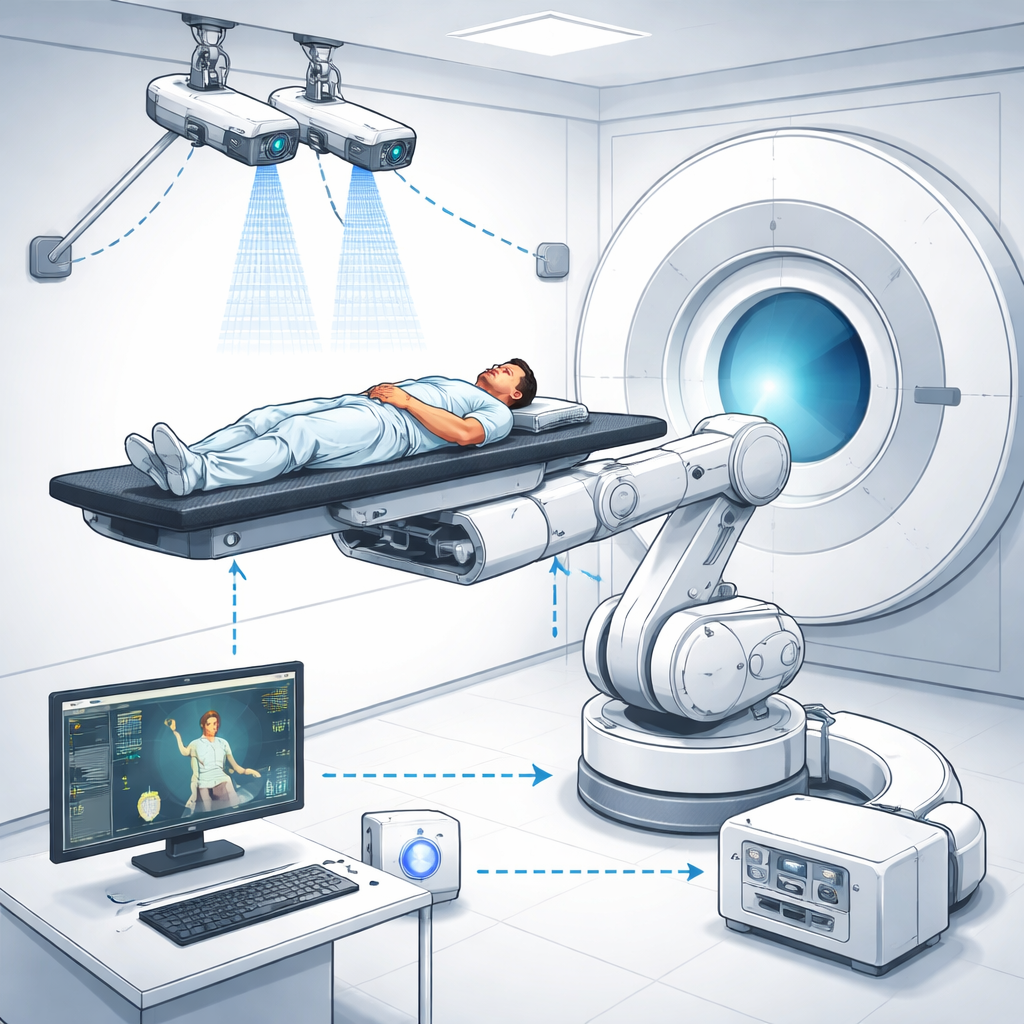
Per affrontare il problema, il team di ricerca ha costruito un sistema integrato Surface‑Guided BNCT (SG‑BNCT) che combina tre componenti principali: un programma di pianificazione del trattamento specializzato chiamato NeuMANTA, una coppia di telecamere stereo binoculare e un robot industriale a sei assi che trasporta il lettino di trattamento. In NeuMANTA i medici pianificano il trattamento BNCT sulle immagini TC, includendo il punto esatto dove il fascio neutronico deve passare e tre piccoli punti di riferimento, o marker fiduciari, sulla pelle del paziente. Questi marker definiscono la posizione del paziente nelle immagini di pianificazione e collegano quel piano alle coordinate della sala di trattamento mediante matrici di trasformazione matematiche.
Come le telecamere 3D vedono e correggono la messa a punto
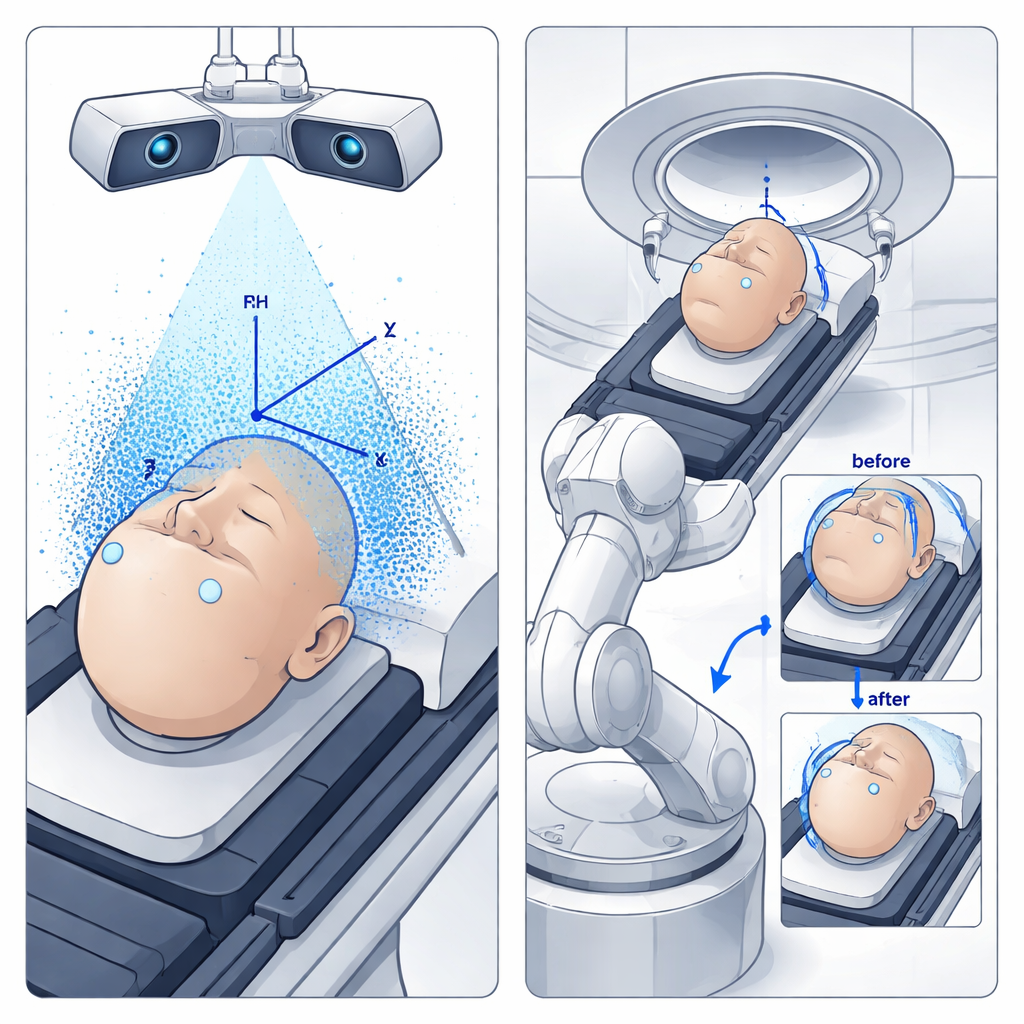
In sala trattamento, due telecamere ad alta risoluzione osservano il paziente da angolazioni diverse, proprio come fanno gli occhi umani. Utilizzando un moderno algoritmo di rilevamento degli oggetti (YOLO) addestrato su oltre mille immagini, il sistema individua rapidamente gli stessi marker fiduciari sulla superficie del paziente. Confrontando come ciascun marker appare nelle viste della telecamera sinistra e destra, il computer ricostruisce le loro posizioni 3D e crea una dettagliata nuvola di punti della superficie. A partire da tre marker non collineari ricostruisce un sistema di coordinate del paziente e lo confronta con il sistema di coordinate definito nel piano di trattamento. Qualsiasi discrepanza tra la posizione pianificata e quella reale viene trasformata in comandi di traslazione e rotazione—sei gradi di libertà in totale—per il robot industriale che supporta il letto del paziente.
Test con un paziente sostitutivo
Prima di utilizzare il sistema su pazienti reali, il team lo ha testato con un fantoccio antropomorfo—un modello a forma umana—dotato di marker interni e superficiali visibili sia nelle scansioni TC sia alle telecamere. Hanno creato molteplici configurazioni di trattamento in NeuMANTA con diverse direzioni del fascio e poi hanno chiesto al sistema SG‑BNCT di riprodurre automaticamente questi piani muovendo il fantoccio nella posizione prevista. Un laser posto al centro dell’apertura del fascio neutronico ha fatto da sostituto del fascio reale, così i ricercatori hanno potuto misurare direttamente quanto la posizione finale sul fantoccio si discostasse dall’obiettivo voluto, sia lungo la direzione del fascio (distanza sorgente‑pelle) sia lateralmente nel piano perpendicolare al fascio.
Quanto vicino ci è arrivato il sistema?
Su 24 configurazioni sperimentali, gli errori di posizionamento del sistema sono stati tipicamente inferiori a 1 millimetro in entrambe le direzioni, con i peggiori errori in singola passata che raggiungevano circa 2‑3 millimetri lungo l’asse del fascio. Gli autori hanno attribuito queste discrepanze residue a tre cause principali: lo spessore delle slice delle immagini TC, piccole incertezze di calibrazione nelle telecamere stereo e lievi imprecisioni a livello di pixel quando il software individua i marker. È importante che il sistema sia progettato per operare in anello chiuso: misura ripetutamente le posizioni dei marker, aggiorna l’allineamento 3D e comanda ulteriori movimenti fini del robot finché l’errore residuo non scende sotto una soglia preimpostata. In questi test iterativi, le deviazioni finali sono costantemente scese ben al di sotto di 1 millimetro, raggiungendo un allineamento sub‑millimetrico sia in profondità sia lateralmente.
Cosa significa questo per i pazienti
Per i pazienti che possono beneficiare della BNCT—specialmente quelli con tumori in regioni complesse o sensibili—questo sistema di posizionamento guidato dalla superficie e assistito dal robot promette trattamenti più affidabili ed efficienti. Collegando il software di pianificazione del trattamento direttamente alle telecamere che osservano il paziente reale e a un robot in grado di eseguire movimenti precisi, il metodo riduce la dipendenza dall’allineamento laser manuale e dal giudizio umano. Sebbene la versione attuale sia troppo lenta per un vero tracciamento dei movimenti in tempo reale e finora siano stati effettuati solo test statici, i risultati mostrano che la tecnologia può posizionare routinariamente un paziente con precisione sub‑millimetrica. Con ulteriori miglioramenti della velocità e l’irraggiamento dei componenti hardware, questo approccio potrebbe diventare una soluzione pratica per terapie BNCT più sicure e consistenti in clinica.
Citazione: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Parole chiave: terapia di cattura neutronica del boro, posizionamento del paziente, stereo visione, robotica medica, guida sulla superficie