Clear Sky Science · it
Esplorare le profondità oceaniche: svelare tesori nascosti con l’IoT e un modello ibrido profondo ensambled
Perché l’esplorazione del fondale si sta aggiornando con la tecnologia
Il profondo oceano e il terreno sottostante nascondono cavi, condotte, rovine antiche ed ecosistemi fragili. Tuttavia, acqua torbida, sabbia sospinta e segnali deboli rendono sorprendentemente difficile vedere cosa c’è laggiù. Questo articolo descrive un nuovo modo di combinare molte tipologie di sensori con l’intelligenza artificiale, così che robot subacquei e sistemi di monitoraggio possano individuare oggetti importanti in modo più accurato, rapido e a minor consumo energetico. Il lavoro potrebbe contribuire a proteggere la vita marina, salvaguardare le infrastrutture e aprire nuove frontiere nell’esplorazione.
Molti sensori, un’unica immagine condivisa del profondo
Le attrezzature odierne per il rilevamento subacqueo tendono a basarsi su un solo senso: un ping sonar, una videocamera o un tipo di sensore di terreno. Ognuno funziona bene in condizioni ideali, ma vacilla quando l’acqua diventa torbida, la luce diminuisce o il rumore aumenta. I ricercatori immaginano invece l’oceano come uno spazio sorvegliato da un Internet of Things: piccoli dispositivi in rete che ascoltano, guardano e percepiscono in modi diversi. Il loro sistema fonde i dati provenienti da telecamere, radar a penetrazione del terreno, sensori di vibrazione sismica, sonde termiche e rivelatori elettromagnetici in un unico flusso condiviso per l’analisi. Mescolando queste visuali, il sistema può comunque riconoscere un oggetto anche quando un sensore è confuso da fango, bolle o riflessi. 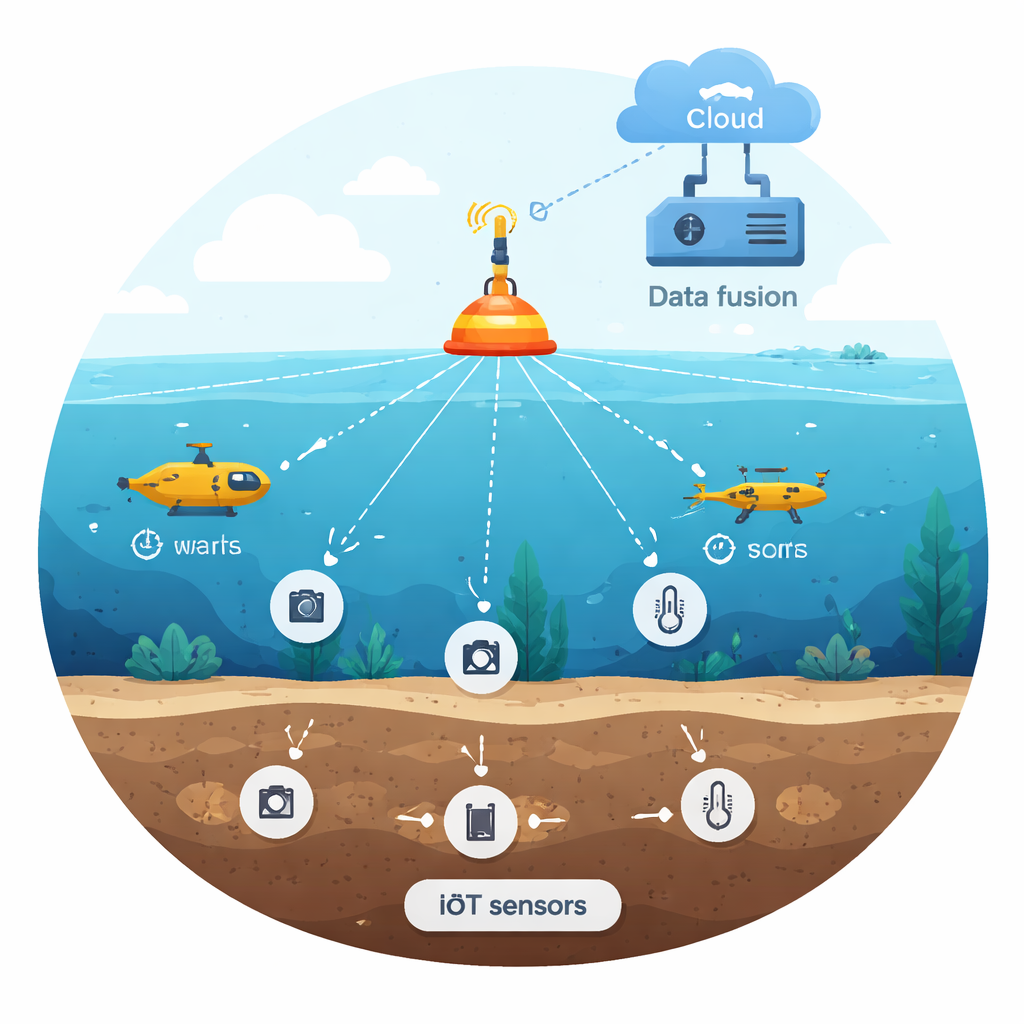
Pulire segnali disordinati prima che raggiungano il cervello
I dati grezzi raccolti sott’acqua sono tutt’altro che perfetti. Sono cosparsi di picchi casuali, lacune e letture anomale causate da correnti variabili, animali in movimento e interferenze elettroniche. Prima che qualsiasi algoritmo intelligente prenda decisioni, gli autori sottopongono questi dati a una linea di pulizia accurata. Usano filtri mediani per smussare rumori improvvisi senza sfocare caratteristiche reali, controlli statistici per individuare e rimuovere outlier e sincronizzazione affinché le letture dei diversi dispositivi si allineino nel tempo. Ridimensionano inoltre i valori in modo che un sensore molto sensibile non sovrasti quelli più deboli, trasformano tracce radar monodimensionali in immagini e impiegano tecniche moderne per comprimere centinaia di misure in un set più piccolo e informativo. Tutto questo è pensato perché il sistema di apprendimento veda un quadro nitido invece di un sfondo caotico.
Un motore ibrido di apprendimento che individua pattern e prende decisioni
Al centro dell’approccio c’è ciò che gli autori chiamano modello Ensembled Deep Hybrid Learning (EDHL). Ha due parti principali che svolgono ruoli complementari. Per prima cosa, una rete neurale profonda in stile Inception funge da “occhi”, esaminando le immagini dei sensori a più scale contemporaneamente per cogliere sia dettagli fini, come un cavo, sia forme più ampie, come un affioramento roccioso. Da questo produce ricche descrizioni numeriche di ogni scena. Secondariamente, un classificatore a gradient boosting funge da “comitato decisionale”: costruisce molti piccoli alberi decisionali che correggono a vicenda gli errori, perfezionando gradualmente la risposta sull’oggetto presente. Un passaggio di selezione delle feature sceglie solo i segnali più informativi, riducendo memoria e velocizzando il sistema finale senza scartare ciò che conta di più. 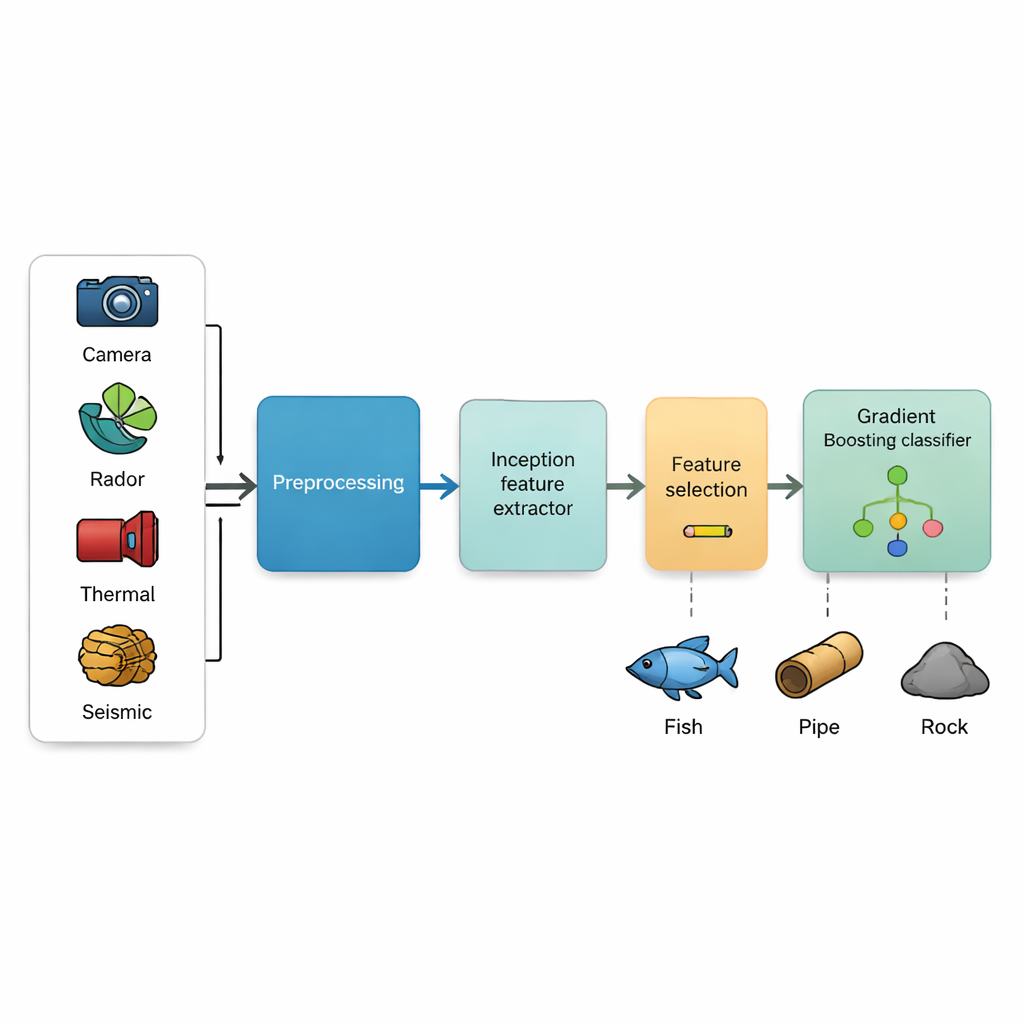
Mettere il sistema alla prova
Per verificare se il loro progetto funziona nella pratica, il team lo ha addestrato e valutato usando un’ampia raccolta pubblica di immagini subacquee che include pesci, coralli, spugne, alghe, conchiglie, crostacei e altre scene di fondale. Hanno confrontato molte varianti di pulizia dei dati e selezione delle feature, e hanno messo a confronto il loro modello con noti sistemi di deep learning come reti convoluzionali classiche, ResNet, DenseNet, EfficientNet, reti a capsule e persino modelli basati su transformer. La configurazione EDHL, specialmente se abbinata a una pulizia accurata del rumore e a una selezione delle feature basata sulla correlazione, ha raggiunto un’accuratezza superiore al 98%, con molte meno false segnalazioni e oggetti mancati rispetto ai concorrenti. È importante che abbia mantenuto questo alto livello di prestazioni pur funzionando su hardware modesto, simile a quello che si potrebbe usare su dispositivi edge, non solo su potenti server di laboratorio.
Cosa significa per la futura esplorazione oceanica
Per i non specialisti, la conclusione è che gli autori hanno costruito un sistema “percepire‑e‑ragionare” più intelligente per il mondo subacqueo. Unendo sensori IoT eterogenei con un motore di apprendimento ibrido, dimostrano che è possibile individuare e classificare gli oggetti del fondale in modo molto affidabile senza bisogno di computer ingombranti o condizioni di visibilità perfette. In futuro, questo tipo di tecnologia potrebbe aiutare flotte di robot subacquei a mappare il fondale, monitorare habitat fragili, tracciare l’inquinamento e ispezionare infrastrutture sepolte con meno errori e consumando meno energia. Trasforma l’ambiente disordinato e ostile delle grandi profondità in un luogo dove i sensi digitali possono finalmente vedere con sufficiente chiarezza per svelare i suoi tesori nascosti.
Citazione: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Parole chiave: rilevamento di oggetti subacquei, sensori IoT, apprendimento profondo, esplorazione marina, rilevamento multimodale