Clear Sky Science · it
Progettazione e implementazione del controllo di un braccio robotico a 6 DoF con rilevamento degli oggetti basato su apprendimento automatico usando un microcontrollore mini
Bracci robotici più intelligenti con un budget più ridotto
Immaginate un braccio robotico di fabbrica che riesca a individuare un oggetto, decidere come afferrarlo e muoversi con precisione — il tutto senza dipendere da un computer ingombrante o da una connessione cloud. Questo articolo descrive esattamente questo: un braccio robotico a sei snodi (6-DoF) che vede e decide grazie a un piccolo e poco costoso microcontrollore. Per i lettori interessati a come l’intelligenza artificiale stia uscendo dai data center e entrando nelle macchine di uso quotidiano, questo lavoro mostra come visione e controllo avanzati possano funzionare su hardware non molto più grande di una chiavetta USB.
Perché ridurre il “cervello” dei robot è importante
I robot industriali tradizionali spesso dipendono da potenti computer esterni per riconoscere gli oggetti e pianificare i movimenti. Ciò aumenta i costi, i cablaggi e la complessità tecnica, e può rappresentare una barriera per le piccole e medie imprese. Gli autori si sono posti l’obiettivo di dimostrare che un singolo microcontrollore economico potesse fare quasi tutto: vedere gli oggetti, determinare la loro posizione nello spazio 3D, pianificare il movimento del braccio e pilotare i motori che eseguono il compito. Mantenendo l’elaborazione a bordo, il sistema diventa più portabile, più efficiente dal punto di vista energetico e più semplice da installare in spazi ristretti o ambienti che cambiano, dalle piccole officine ai laboratori didattici.
Un braccio flessibile che si costruisce da sé
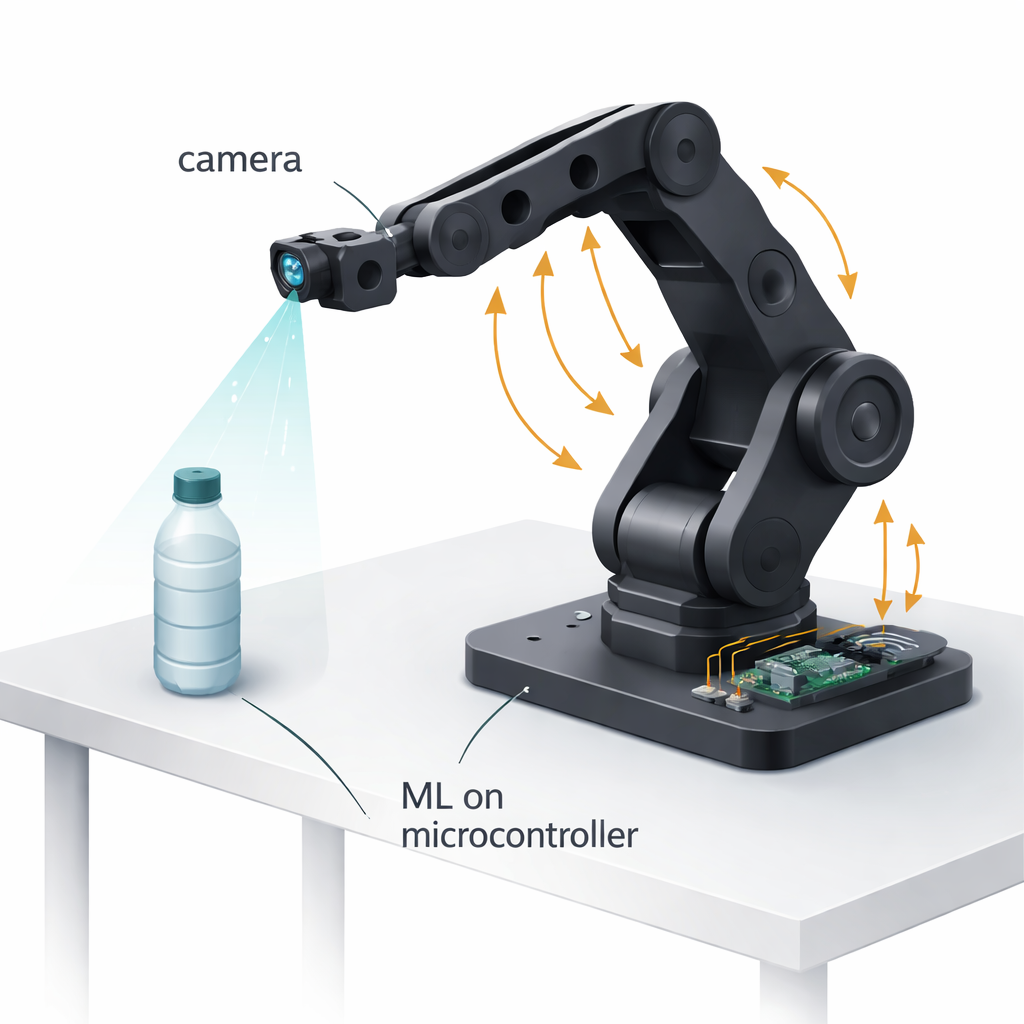
Il team ha progettato un braccio robotico a sei snodi partendo da zero, usando principalmente parti in plastica stampate in 3D per mantenerlo leggero ed economico. Motori servo hobby ad alto torque muovono ogni giunto, e i ricercatori hanno modificato questi motori per leggere in tempo reale gli angoli esatti, consentendo un controllo chiuso preciso. Una pinza a due dita su misura all’estremità integra un semplice sensore di corrente: monitorando quanta corrente assorbe il motore della pinza, il sistema può dedurre quanto sta stringendo e regolare automaticamente la presa per tenere gli oggetti saldamente senza schiacciarli o farli cadere. Montata sul «polso» del braccio c’è una piccola camera full-HD che si muove con il braccio, offrendo al sistema una vista in prima persona della scena davanti alla pinza.
Insegnare a un piccolo chip a riconoscere le bottiglie
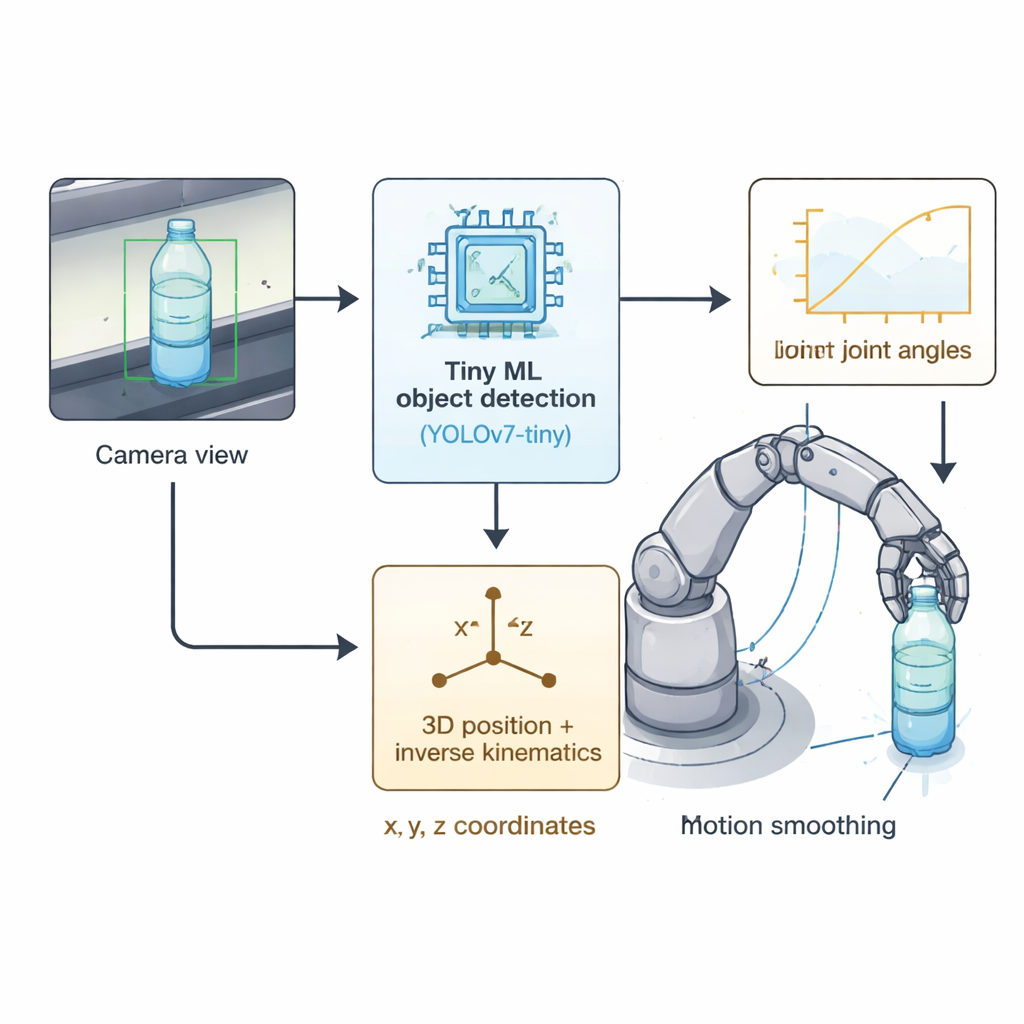
Al centro della visione del sistema c’è una versione compatta di una popolare rete di rilevamento degli oggetti chiamata YOLOv7-tiny. I ricercatori hanno addestrato questo modello su oltre 2.500 immagini di bottiglie d’acqua in plastica acquisite in una vasta gamma di condizioni di illuminazione, angolazioni, distanze e occlusioni parziali. Dopo l’addestramento su una potente GPU, hanno compresso il modello in una forma a 8 bit di “tiny ML” in modo che potesse entrare nella memoria e nella capacità di calcolo limitate del microcontrollore AMB82-Mini. Anche in questa versione ridotta, il modello ha raggiunto circa l’88% di accuratezza nel riconoscere le bottiglie e ha funzionato a una velocità sufficiente — circa 7–8 fotogrammi al secondo — per operazioni di pick-and-place in tempo reale direttamente sul microcontrollore, senza l’ausilio di un PC o del cloud.
Dai pixel al movimento preciso
Una volta che la camera individua una bottiglia, il sistema calcola il centro del riquadro di rilevamento nell’immagine e stima la distanza dell’oggetto in base a quanto è grande in pixel. Ciò fornisce coordinate x, y e z nello spazio. Un risolutore matematico personalizzato traduce quindi quelle coordinate negli angoli dei sei giunti che il braccio deve raggiungere, usando la geometria robotica standard ma ottimizzata per eseguire rapidamente sul piccolo processore. Il software di controllo, organizzato come una semplice macchina a stati, cicla tra la ricerca dell’oggetto, l’avvicinamento, la chiusura della pinza utilizzando il sensore di corrente come sensore tattile e infine il trasporto dell’oggetto verso un punto di rilascio fisso. Per mantenere i movimenti fluidi e ridurre le vibrazioni, il team usa curve di “easing” per i movimenti accuratamente modellate e un metodo speciale di modulazione della tensione che riduce il ronzio dei motori e il sovraelongamento.
Test nel mondo reale e cosa dimostrano
In esperimenti ripetuti, il sistema integrato ha dimostrato di poter afferrare e posizionare in modo affidabile bottiglie di plastica fino a 300 grammi con una riuscita del 100%, mantenendo buone prestazioni anche con carichi maggiori fino a 500 grammi. Simulazioni e misure hanno mostrato che gli errori di posizionamento erano tipicamente dell’ordine di un millimetro — sufficiente per molti compiti di smistamento e confezionamento. Rispetto a schemi di controllo più semplici, la strategia di controllo dei motori proposta ha ridotto le vibrazioni, accorciato i tempi di stabilizzazione del braccio ed eliminato movimenti a scatti. Sebbene i test si siano concentrati su un tipo di oggetto e su distanze fisse in condizioni indoor controllate, offrono prove convincenti che percezione e controllo robotico avanzati possano essere racchiusi in una singola scheda embedded molto modesta.
Cosa significa questo per l’automazione di tutti i giorni
Per i non specialisti, la conclusione principale è che le capacità avanzate di «vedere» e «muoversi» non sono più appannaggio esclusivo di robot costosi e ad alte prestazioni. Combinando modelli di machine learning ridotti, geometria intelligente e controllo motore accurato su un microcontrollore a basso costo, questo lavoro mostra una strada verso bracci robotici compatti e autosufficienti che piccole aziende manifatturiere, scuole e appassionati potrebbero realisticamente adottare. Man mano che le versioni future si estenderanno a più tipi di oggetti e a ambienti più vari, sistemi embedded simili potrebbero automatizzare silenziosamente innumerevoli lavori semplici di pick-and-place, portando la robotica intelligente alla portata di molte più persone e luoghi.
Citazione: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
Parole chiave: robotica embedded, tiny machine learning, controllo braccio robotico, rilevamento oggetti, automazione industriale