Clear Sky Science · it
Apprendimento per rinforzo bayesiano per il controllo adattivo del recupero di energia nelle braccia degli escavatori idraulici
Perché gli escavatori più intelligenti sono importanti
Gli escavatori idraulici sono i cavalli di battaglia dell’edilizia e dell’estrazione mineraria, ma consumano molto diesel e disperdono gran parte dell’energia prelevata dal motore. Qualunque miglioramento nell’uso dell’energia può tradursi in bollette carburante più basse per le imprese e in minori emissioni per tutti. Questo studio esplora un nuovo modo per far sì che le braccia degli escavatori “pensino in anticipo” rispetto a condizioni del terreno variabili e all’usura della macchina, in modo da recuperare e riusare energia in modo più efficace restando entro rigidi limiti di sicurezza.
Scavare è oneroso per il carburante
Gli escavatori moderni spesso fanno funzionare i loro sistemi idraulici a pressioni alte e fisse, sia che stiano scavando roccia dura sia che stiano livellando terreni sciolti. Questo approccio unico mantiene le macchine affidabili ma disperde energia sotto forma di calore, specialmente durante compiti leggeri e quando il braccio si abbassa per il proprio peso. Sebbene alcuni progetti più recenti includano dispositivi che possono catturare questa energia in eccesso in accumulatori idraulici, la maggior parte delle macchine si affida ancora a regole semplici e fisse per decidere quando e come usarli. Il risultato è un consumo di carburante che può essere superiore del 20% rispetto al necessario e un’impronta di carbonio maggiore nei cantieri di tutto il mondo.
Un sistema di controllo che impara per l’articolazione
Gli autori progettano un modello virtuale dettagliato di una braccio di escavatore da 21 tonnellate, comprensivo di cilindri, pompa, valvole e un accumulatore carico di gas che immagazzina energia quando il braccio si abbassa e la rilascia per aiutare a sollevare il carico in seguito. Il loro controllore deve affrontare molte incertezze del mondo reale: il terreno che improvvisamente diventa più duro o più morbido, l’olio che si addensa o si fluidifica con la temperatura, componenti che si usurano lentamente e sensori rumorosi o leggermente distorti. Invece di assumere che tutto sia noto e costante, il sistema tratta lo stato reale della macchina come parzialmente nascosto e aggiorna continuamente la sua migliore stima usando metodi bayesiani. Un filtro a particelle stima fattori nascosti come la resistenza del terreno e se l’accumulatore è leggermente sovra- o sotto-carico rispetto al punto di progetto. 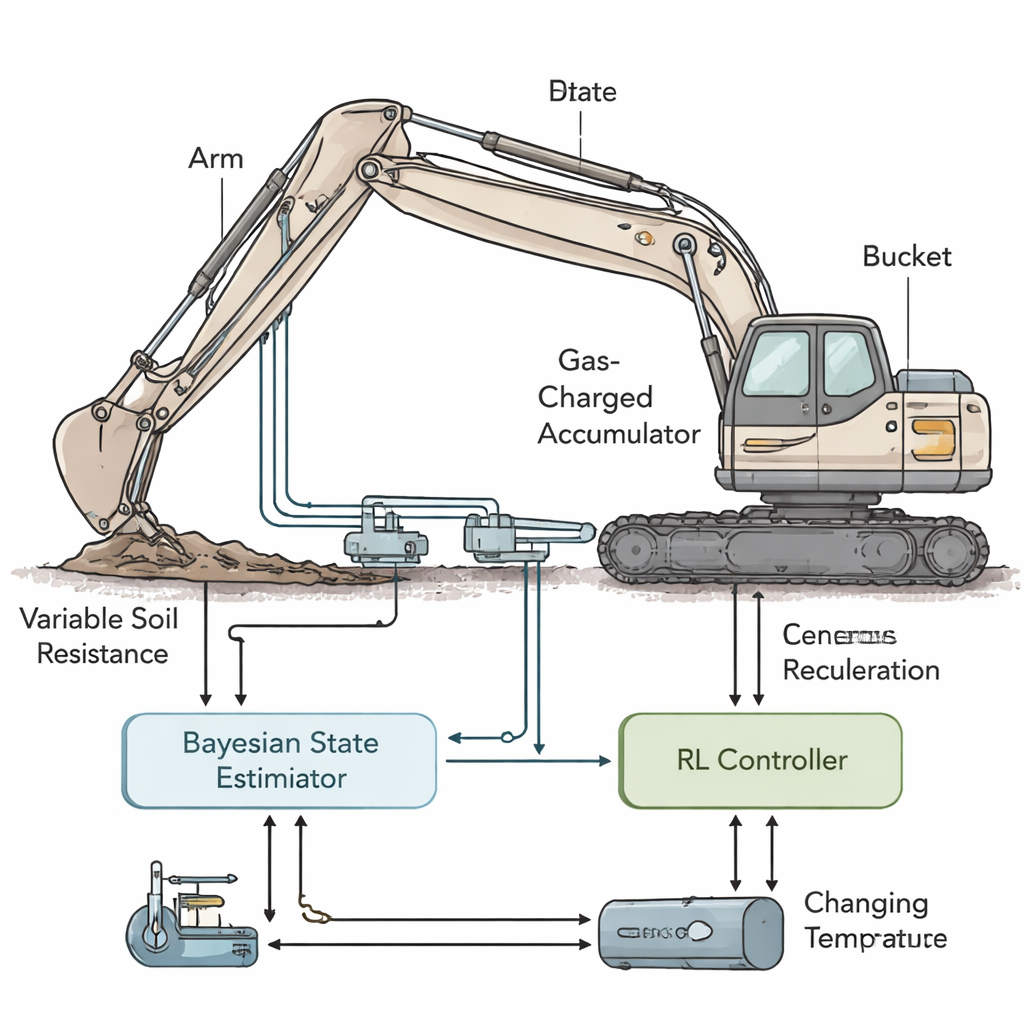
Insegnare alla macchina ad adattarsi in sicurezza
Sopra questo stima dello stato, il team allena una politica di apprendimento per rinforzo (RL), un algoritmo che scopre gradualmente buone strategie per tentativi e errori in simulazione. A ogni istante la politica riceve la “credenza” corrente sullo stato della macchina e sceglie comandi continui per la pressione della pompa e le aperture delle valvole. Un livello di sicurezza dedicato verifica quindi queste proposte e le limita a un intervallo rigorosamente sicuro: le pressioni idrauliche devono rimanere complessivamente tra 5 e 35 megapascals, l’accumulatore deve restare nella finestra 12–28 megapascals e i movimenti delle valvole sono limitati per non sottoporre il sistema a scossoni. Il processo di apprendimento premia il controllore per completare rapidamente ogni ciclo di scavo, usare quanta meno energia idraulica possibile e mantenere la benna sul bersaglio di posizione, penalizzando azioni che porterebbero il sistema verso regioni non sicure.
Quanto bene si comporta il controllore intelligente
I ricercatori eseguono estese co-simulazioni a 100 aggiornamenti al secondo, confrontando il loro controllore RL bayesiano con due configurazioni più tradizionali: una a parametri fissi e una che imita un operatore esperto che effettua semplici aggiustamenti manuali di pressione e velocità. Tutti i controllori affrontano lo stesso compito scriptato di 20 minuti, in cui la difficoltà del terreno cambia in più fasi e l’olio passa da freddo a caldo. Il controllore basato sull’apprendimento rileva i cambiamenti nel terreno in pochi secondi, aumentando la pressione quando il terreno si indurisce per mantenere i tempi di ciclo stabili e abbassandola quando lo scavo diventa più facile per risparmiare energia e creare maggiori opportunità di caricare l’accumulatore. In molte esecuzioni randomizzate riduce il consumo di energia per ciclo di scavo di circa il 20–22% rispetto al controllore fisso e di circa il 14–18% rispetto a quello regolato dall’operatore, riducendo inoltre i tempi di ciclo e migliorando la precisione con cui la benna raggiunge gli obiettivi di posizione. Gli eventi di sicurezza, come pressioni che tentano di superare i limiti o valvole di sfogo aperte a lungo, diventano più rari nonostante il sistema spinga le prestazioni più a fondo. 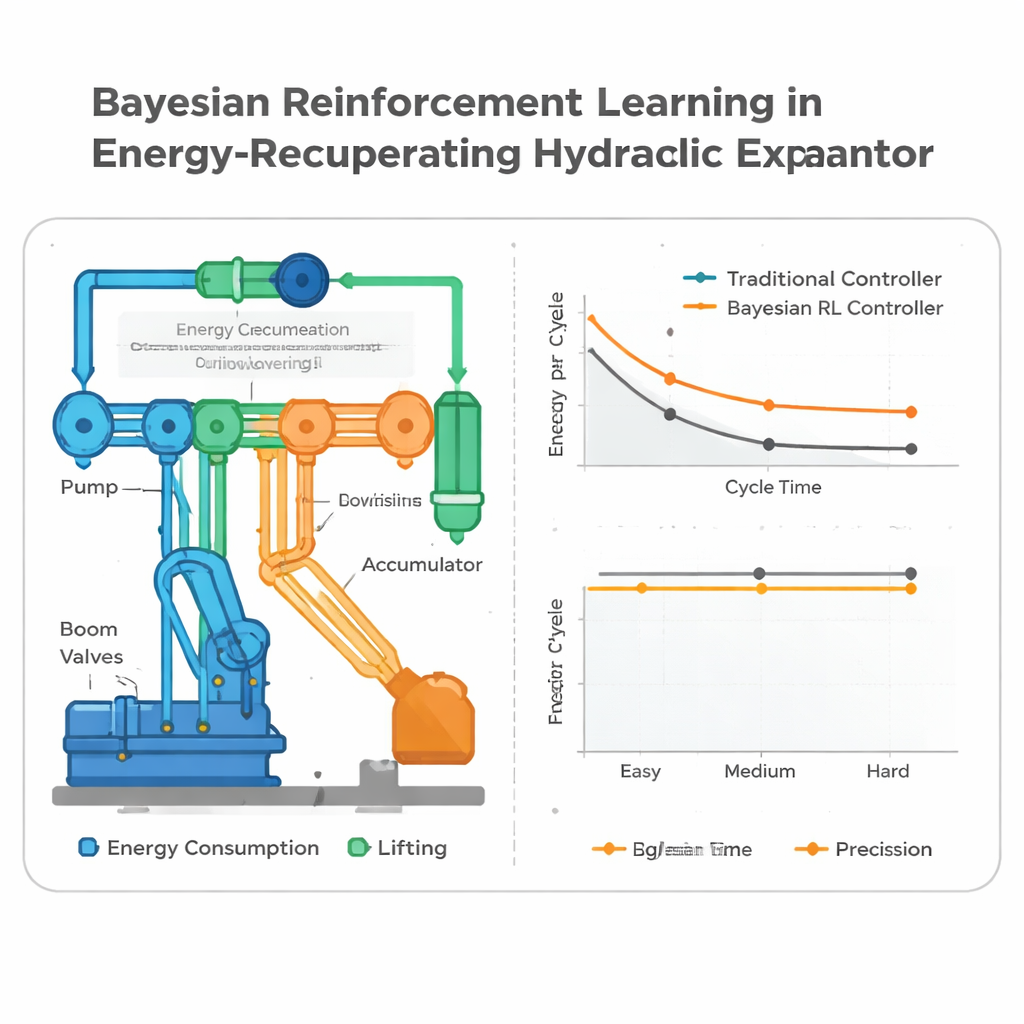
Cosa significa per le macchine reali
Per un lettore non specialista, il messaggio chiave è che la braccio dell’escavatore può imparare a essere sia prudente sia parsimonioso. Aggiornando costantemente la sua comprensione di quanto sia difficile scavare, di quanto siano in salute i suoi componenti e di quanta energia sia immagazzinata nell’accumulatore, il controllore decide in tempo reale quando risparmiare energia e quando spendere un po’ di più per mantenere la produttività. Lo studio si basa ancora sulla simulazione anziché su prove sul campo e si concentra su una singola taglia di macchina, ma dimostra che combinare ragionamento probabilistico con controllo basato sull’apprendimento può rendere i macchinari pesanti significativamente più efficienti senza sacrificare la sicurezza o la velocità. Se approcci simili fossero trasferiti agli escavatori reali, potrebbero aiutare le imprese a spostare la stessa quantità di terra con meno carburante, meno usura e minori emissioni.
Citazione: Hu, P., Wen, T., Zhang, D. et al. Bayesian reinforcement learning for adaptive control of energy recuperation in hydraulic excavator arms. Sci Rep 16, 6195 (2026). https://doi.org/10.1038/s41598-026-35391-y
Parole chiave: escavatore idraulico, recupero di energia, apprendimento per rinforzo, controllo bayesiano, efficienza dei macchinari pesanti