Clear Sky Science · it
Un nuovo schema di controllo neuro‑fuzzy adattivo e proporzionale risonante adattivo per applicazioni veicolari con motore PMSM
Viaggi elettrici più silenziosi e più fluidi
Le auto elettriche sono già più pulite dei veicoli a benzina, ma il modo in cui i loro motori vengono controllati lascia ancora margini di miglioramento. Scatti improvvisi quando si preme l’acceleratore, un lieve ronzio del motore e energia sprecata derivano tutti da quanto rapidamente e con che fluidità il motore riesce a rispondere alle condizioni variabili della strada e del traffico. Questo articolo esplora un nuovo modo di “pilotare” il motore dall’interno — usando una combinazione di intelligenza artificiale e una particolare forma di modellazione del segnale — per far sì che i veicoli elettrici accelerino più dolcemente, consumino meno energia e sopportino meglio le perturbazioni del mondo reale.
Perché il controllo del motore conta sulle strade reali
I veicoli elettrici moderni usano spesso motori a magneti permanenti perché sono compatti, efficienti e offrono una forte spinta da fermo. Ma la guida urbana è caotica: i conducenti si fermano e ripartono ai semafori, si districano nel traffico e affrontano salite e carichi variabili. In queste condizioni la velocità del motore può superare o restare indietro rispetto a quanto richiesto dal guidatore, e la coppia sull’albero può presentare ondulazioni. Quelle ondulazioni si manifestano come vibrazioni, rumore e stress aggiuntivo su ingranaggi e cuscinetti. I circuiti di controllo tradizionali, che si basano su regolazioni fisse, funzionano bene solo in un ristretto insieme di condizioni e possono avere difficoltà quando cambiano strada, temperatura o carico del veicolo.
Fondere apprendimento e regole per un controllo della velocità migliore
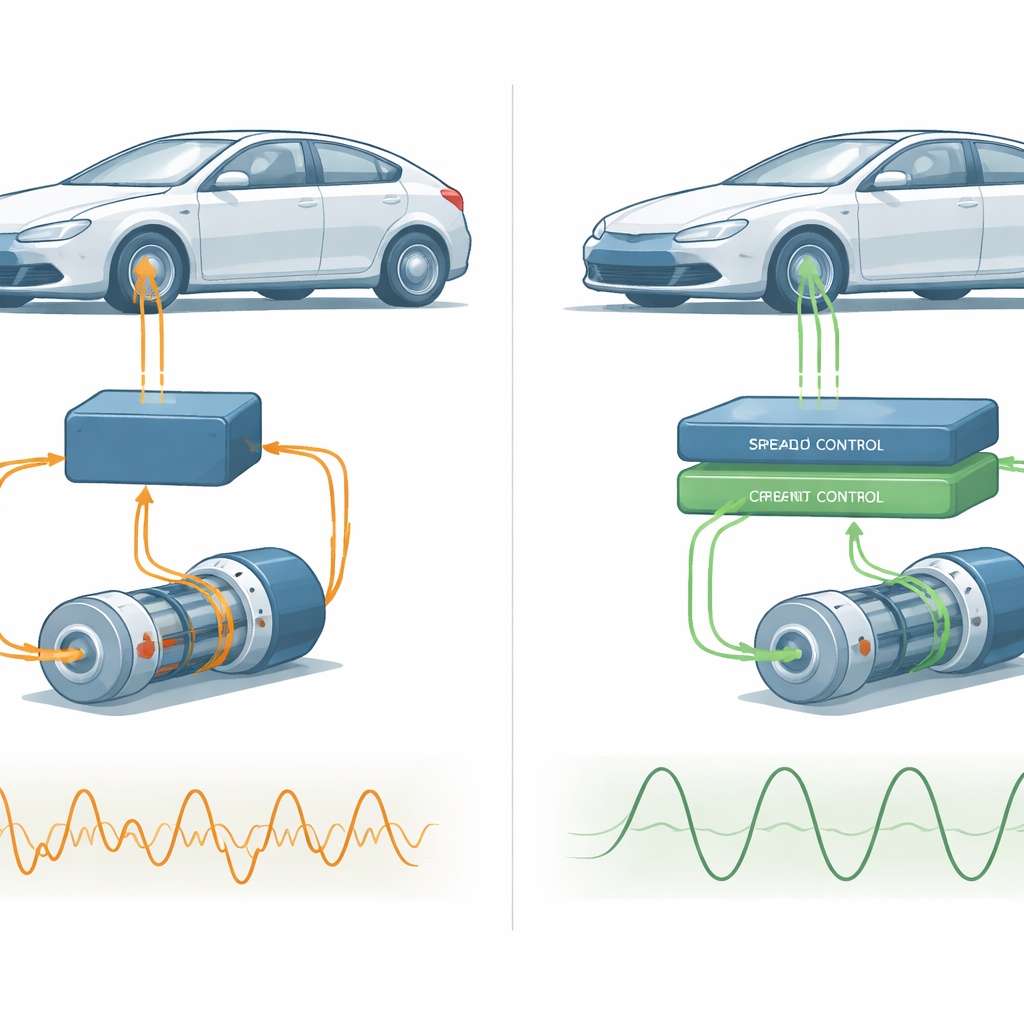
Gli autori sostituiscono il consueto blocco esterno di controllo della velocità con un sistema neuro‑fuzzy adattivo — un controllore che combina le regole if–then della logica fuzzy con la capacità di apprendimento delle reti neurali. Invece di essere tarato a mano una sola volta in fabbrica, questo controllore impara da dati di esempio come la velocità del motore risponde ai comandi e alle perturbazioni. Traduce l’errore di velocità grezzo (quanto la velocità reale è distante da quella desiderata) e la velocità con cui quell’errore cambia in un insieme di “opinioni” sovrapposte, quindi le fonde in una correzione precisa. Risultati di addestramento e test mostrano che questo controllore appreso trova rapidamente impostazioni che riducono sovraelongazioni e sottoscostamenti, abbreviano il tempo necessario per raggiungere la velocità target e mantengono il comportamento stabile anche quando il sistema è non lineare e soggetto a variazioni.
Modellare la corrente per un funzionamento tranquillo e a basso rumore
Mentre il loop esterno decide a quale velocità il motore dovrebbe girare, il loop interno decide quanta corrente elettrica fluisce nelle bobine in ogni istante. Qui gli autori introducono un controllore proporzionale risonante adattivo. Invece di reagire solo all’ampiezza dell’errore, questo controllore è tarato per prestare particolare attenzione alle correnti alla principale frequenza alternata del motore, dove le ondulazioni indesiderate sono più dannose. Scegliendo con cura pochi valori chiave di taratura, eroga una forte capacità correttiva a quella frequenza fondamentale evitando instabilità altrove. Il risultato è una corrente che somiglia quasi a un’onda sinusoidale perfetta, con molte meno escursioni nette che altrimenti si manifesterebbero come ondulazioni di coppia e ronzii udibili.
Mettere alla prova la nuova strategia
Il team valuta il loro progetto a due stadi — controllo di velocità neuro‑fuzzy nel loop esterno e controllo di corrente risonante nel loop interno — tramite dettagliate simulazioni al computer e esperimenti hardware‑in‑the‑loop che mimano una vera trasmissione di un veicolo elettrico. Lo confrontano con tre metodi consolidati: un controllore proporzionale–integrale convenzionale, uno schema che abbina quel controllore a un loop interno risonante e un approccio predittivo basato sul modello. In una serie di scenari — avvio da fermo, marcia costante sotto carico, rapidi cambi di velocità a carico costante e variazioni improvvise di carico a velocità costante — il nuovo schema raggiunge costantemente la velocità target più rapidamente, con picchi e avvallamenti più piccoli. Produce inoltre coppia più uniforme e correnti più pulite, anche quando resistenza e induttanza del motore vengono variate artificialmente per imitare surriscaldamento o ambienti gravosi.
Cosa significa questo per le auto elettriche del futuro
In termini concreti, questa strategia di controllo ibrida permette al motore elettrico di pensare e adattarsi invece di seguire alla cieca una ricetta fissa. Imparando a respingere le perturbazioni a livello di velocità e modellando le forme d’onda di corrente all’interno del motore, l’approccio riduce vibrazioni, rumore ed energia sprecata. Per i conducenti, ciò si traduce in accelerazioni più fluide, crociera più stabile e trasmissioni in grado di tollerare meglio componenti invecchiati e condizioni meteorologiche variabili. Sebbene il metodo presupponga ancora una frequenza operativa fissa in alcune parti, i risultati suggeriscono che aggiungere intelligenza e controllo sensibile alla frequenza agli azionamenti motore potrebbe essere un passo chiave verso veicoli elettrici più raffinati, durevoli ed efficienti.
Citazione: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
Parole chiave: motori per veicoli elettrici, controllo neuro fuzzy, motore sincrono a magneti permanenti, riduzione delle ondulazioni di coppia, azionamenti elettrici avanzati