Clear Sky Science · it
Controllo a scorrimento fuzzy basato sull’algoritmo super-twisting per sistemi descrittori T-S fuzzy
Far comportare i sistemi complessi
Dalla gestione delle popolazioni ittiche al mantenimento della stabilità delle reti elettriche e dei circuiti elettronici, molti sistemi reali si comportano in modo complesso e non lineare. Gli ingegneri impiegano algoritmi di controllo avanzati per mantenere tali sistemi sicuri ed efficienti, anche quando sono soggetti a disturbi e incertezze. Questo articolo introduce una nuova strategia di controllo che doma questi sistemi irrequieti in modo più morbido, evitando i commutazioni brusche e rapidi che possono danneggiare le apparecchiature e degradare le prestazioni.
Perché alcuni sistemi sono difficili da controllare
Molti sistemi pratici sono governati non solo da equazioni che descrivono come le grandezze cambiano nel tempo, ma anche da vincoli algebrici che devono essere soddisfatti in ogni istante. Questi cosiddetti sistemi descrittori compaiono in economia, reti di potenza, collegamenti meccanici e modelli biologici. Per gestirne il comportamento non lineare, i ricercatori spesso ricorrono ai modelli Takagi–Sugeno (T‑S) fuzzy, che rappresentano un sistema complesso come una combinazione di pezzi lineari più semplici, validi in diverse regioni operative. Pur essendo potenti, questi modelli sono a lungo stati ostacolati da un problema tecnico: la maggior parte dei metodi di controllo assumeva conoscenze a priori su come le “funzioni di appartenenza” fuzzy cambino nel tempo, sebbene tali cambiamenti dipendano in realtà dal comportamento futuro sconosciuto del sistema e del suo controllore.
Una forma più morbida di controllo robusto
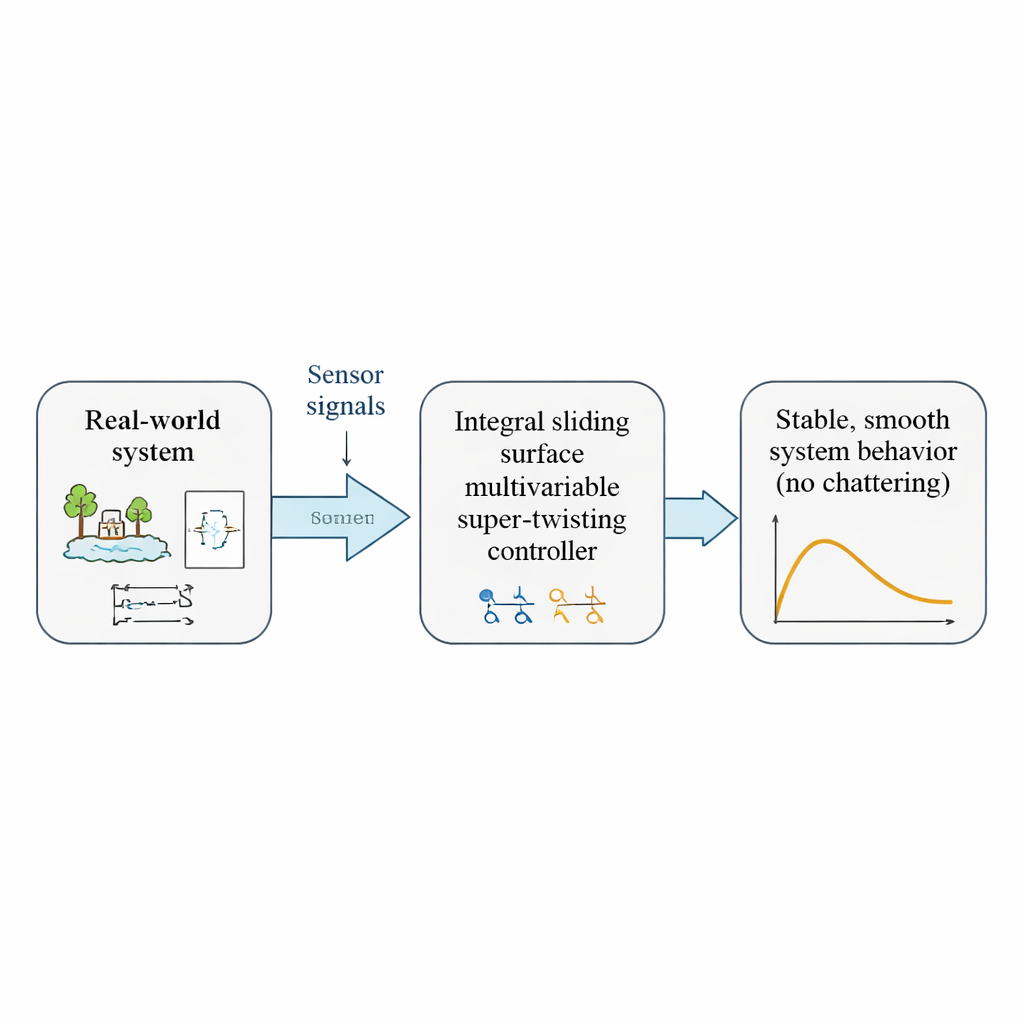
Il controllo a scorrimento è un metodo di controllo robusto noto per la sua capacità di portare rapidamente un sistema su una traiettoria desiderata e mantenerlo lì nonostante i disturbi. Lo fa commutando l’ingresso di controllo in modo da contrastare l’incertezza. Tuttavia, le commutazioni rapide possono causare “chattering” — oscillazioni ad alta frequenza indesiderate o persino dannose nei sistemi meccanici ed elettrici. L’algoritmo super‑twisting, una forma più avanzata del controllo a scorrimento, nasconde la commutazione all’interno di un processo interno, producendo un segnale di controllo continuo che conserva la robustezza riducendo il chattering. Finora, questa tecnica era principalmente limitata a sistemi a ingresso singolo o richiedeva di scomporre i sistemi multi-ingresso in molti controllori separati, con un onere computazionale elevato.
Una nuova superficie di scorrimento senza assunzioni nascoste
Il primo contributo chiave degli autori è una nuova specie di superficie di scorrimento “integrale” progettata specificamente per i sistemi descrittori T‑S fuzzy. In termini semplici, questa superficie è una condizione matematica che coinvolge sia il comportamento presente sia quello accumulato nel passato del sistema. Costruendola in modo intelligente, gli autori mostrano di poter garantire il moto desiderato una volta che il sistema si trova su questa superficie, senza la necessità di limiti preventivi su come cambiano le funzioni di appartenenza fuzzy. Ciò rimuove un’ipotesi restrittiva che ha limitato i metodi precedenti. L’analisi utilizza funzioni opportunamente scelte, analoghe all’energia, per dimostrare che il comportamento del sistema sulla superficie di scorrimento rimane stabile nel tempo.
Un controllore super‑twisting multivariabile
Sulla base di questa superficie di scorrimento, l’articolo sviluppa una versione multivariabile dell’algoritmo super‑twisting. Piuttosto che progettare un controllore per ogni ingresso o per ogni variabile di scorrimento, il metodo li tratta tutti insieme in forma matriciale. Questo lo rende più adatto a sistemi in cui stati diversi sono fortemente accoppiati, come specie interagenti in un ecosistema o correnti e tensioni in un circuito. Gli autori ricavano condizioni per scegliere i guadagni del controllore in modo che gli stati del sistema raggiungano immediatamente la superficie di scorrimento e poi convergano in tempo finito. Poiché il segnale di controllo è continuo e non commutato bruscamente, il chattering è soppresso per progettazione, mentre la robustezza ai disturbi viene preservata.
Dimostrare l’idea in biologia ed elettronica
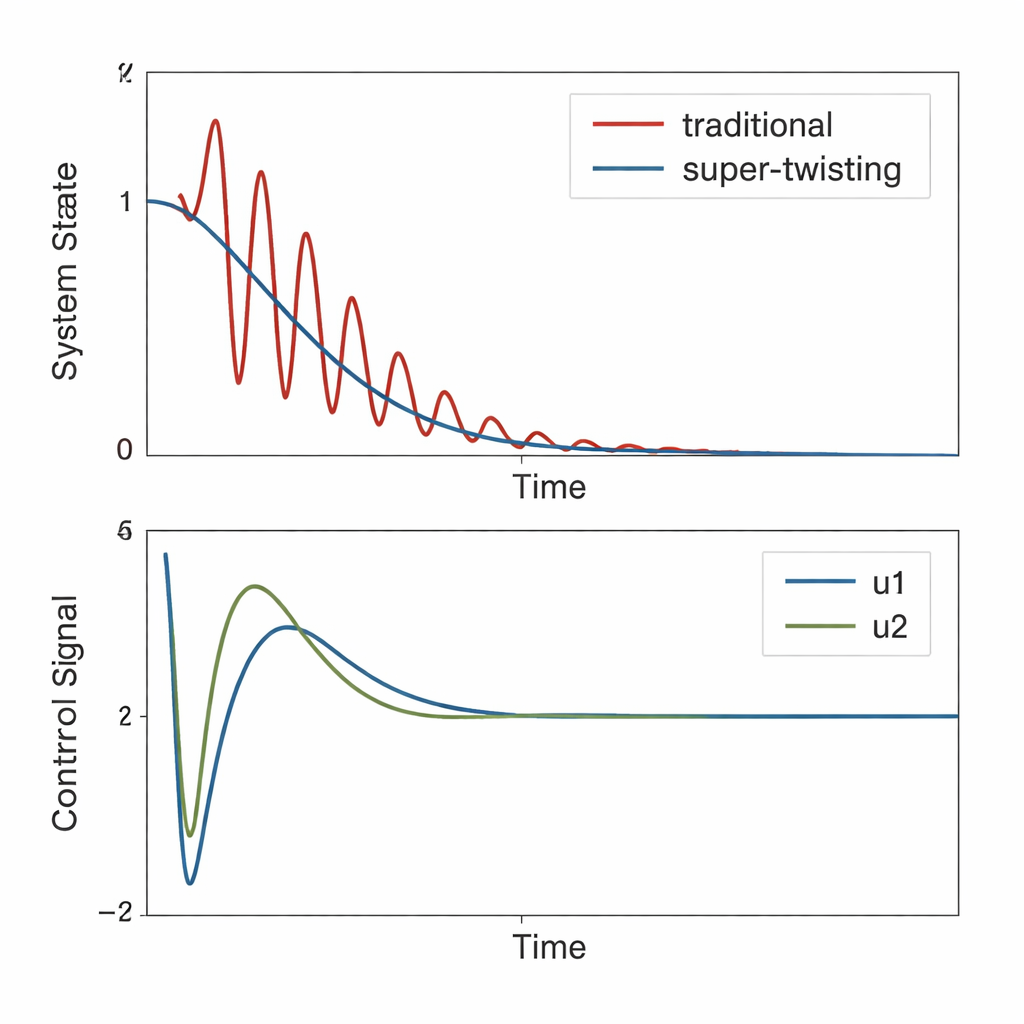
Per dimostrare la praticità del loro metodo, gli autori lo applicano a due diversi sistemi descrittori non lineari. Il primo modella uno scenario bio‑economico che coinvolge popolazioni immature e mature di una specie, insieme a una variabile che cattura la capacità riproduttiva e le azioni di gestione come pesca e regolamentazione. Il secondo esempio è un circuito non lineare con diodo a tunnel, un banco di prova classico in elettronica. In entrambi i casi, le simulazioni mostrano che il controllore proposto stabilizza rapidamente gli stati del sistema e mantiene le variabili di scorrimento vicino a zero, indicando un tracciamento preciso del comportamento desiderato. Rispetto ai controllori a scorrimento tradizionali, il nuovo approccio riduce significativamente le oscillazioni sia nella risposta del sistema sia nei segnali di controllo.
Che cosa significa nella pratica
Per i non esperti, il messaggio principale è che questo lavoro offre un modo per mantenere sotto controllo sistemi complessi, vincolati e incerti senza le commutazioni violente che hanno afflitto alcuni metodi robusti. Combinando modellazione fuzzy, una superficie di scorrimento integrale e un algoritmo super‑twisting multivariabile, gli autori progettano controllori che sono sia matematicamente garantiti come stabili sia praticamente più morbidi nel funzionamento. Ciò potrebbe beneficiare applicazioni che vanno dalla gestione delle risorse ecologiche all’elettronica di potenza avanzata e ai sistemi di controllo in rete, specialmente man mano che lavori futuri estenderanno queste idee a contesti cyber‑sicuri in cui la comunicazione può essere interrotta da attacchi.
Citazione: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Parole chiave: controllo a scorrimento, sistemi fuzzy, controllo robusto, dynamica non lineare, algoritmo super-twisting