Clear Sky Science · it
Controllore adattivo a riferimento di modello robusto per manipolatore planare a 3 DOF
Braccia robotiche più intelligenti per compiti più impegnativi
Le braccia robotiche di fabbrica sono estremamente veloci e precise, ma le loro prestazioni possono calare quando il mondo reale non si comporta come previsto: i carichi variano, i pezzi sono posizionati leggermente diversamente o forze inaspettate scuotono il braccio. Questo articolo esplora un nuovo modo per mantenere accurato e stabile un comune braccio robotico a tre giunti anche quando il suo comportamento è difficile da modellare esattamente e sono presenti forti disturbi, rendendo i robot partner più affidabili in reparto.
Perché tre giunti contano nelle fabbriche reali
Lo studio si concentra su un robot planare a tre link: tre segmenti rigidi collegati da giunti rotativi che si muovono in un piano. Nonostante la semplicità, questa configurazione è la spina dorsale di molte operazioni industriali di pick-and-place, linee di imballaggio e sistemi di assemblaggio. La difficoltà è che il moto di un giunto influenza fortemente gli altri, e le equazioni che descrivono il movimento del braccio sono altamente non lineari e fortemente accoppiate. I regolatori tradizionali possono funzionare bene quando tutto è noto e prevedibile, ma faticano quando il carico del robot cambia, quando attriti o masse non sono modellati accuratamente, o quando disturbi esterni deviano il braccio dalla traiettoria.
Scomporre un moto complesso in parti più semplici
Per dominare questa complessità, gli autori prima ricavano un modello matematico dettagliato del moto del robot, includendo come masse dei link, angoli dei giunti e gravità si combinano per produrre il movimento. Introducono poi una semplificazione chiave: una strategia di “decoupling”. Invece di trattare il robot come un unico sistema a tre giunti intrecciati, ogni giunto viene modellato come se la sua accelerazione dipendesse principalmente dalla coppia del proprio motore e dalla propria velocità. Gli effetti residui — come le interazioni tra giunti, i termini dovuti alla gravità e altre influenze difficili da modellare — vengono raggruppati e trattati come incertezze. Questo decoupling permette di scomporre il problema di controllo in tre sottosistemi più piccoli e gestibili, uno per giunto, pur riconoscendo che il sistema reale rimane complesso sotto la superficie. 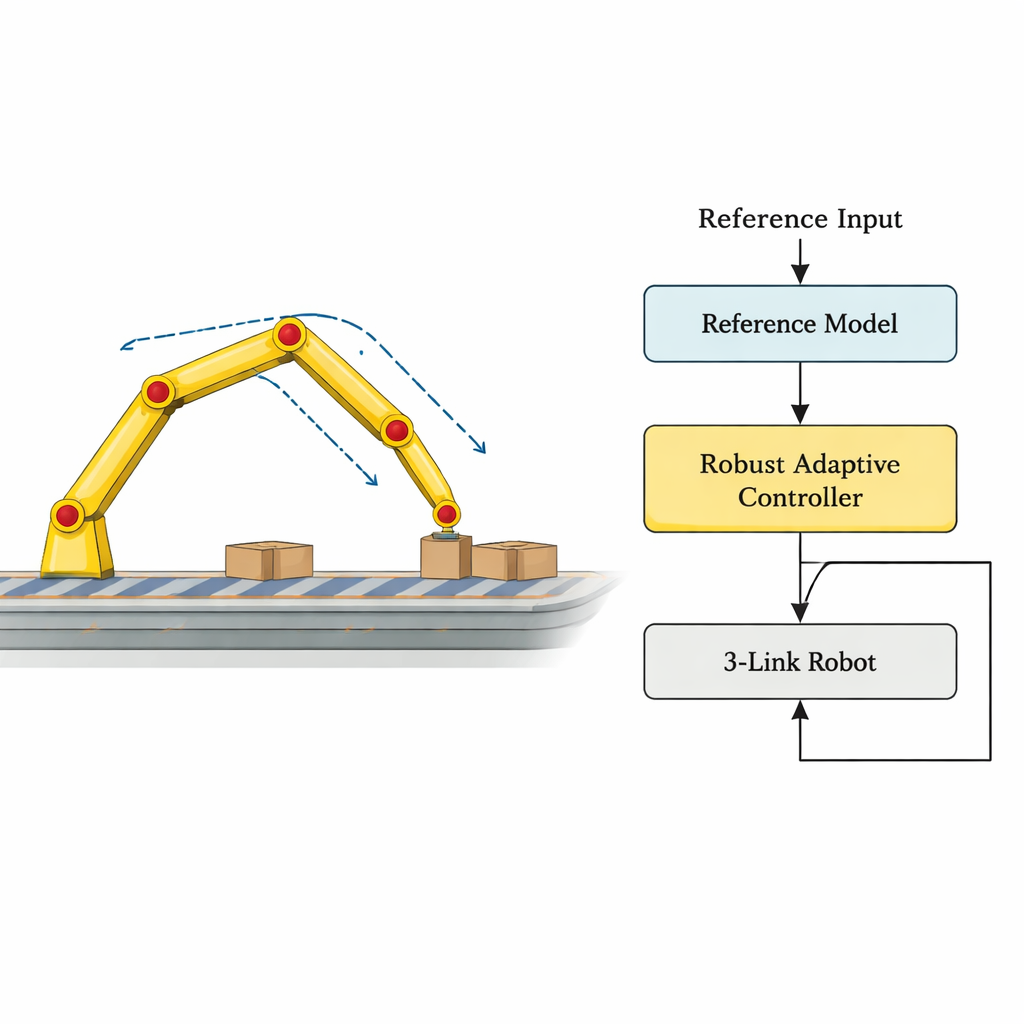
Insegnare al robot a seguire un bersaglio in movimento
Sulla base di questo modello semplificato, gli autori costruiscono un controllore adattivo a riferimento di modello (MRAC). In termini semplici, definiscono prima una risposta ideale — un modello di riferimento che indica come ogni giunto dovrebbe muoversi nel tempo quando riceve un comando. Il controllore confronta continuamente il moto reale del robot con questo ideale e regola in tempo reale i guadagni interni per ridurre la discrepanza. In condizioni perfette, un MRAC convenzionale può far sì che il robot segua da vicino il riferimento, ma presenta una debolezza grave: in presenza di disturbi persistenti o errori di modellazione, i guadagni adattivi possono derivare verso valori estremi, provocando oscillazioni, spreco di energia e persino perdita di stabilità. Questo fenomeno, chiamato deriva dei parametri, rende il MRAC semplice rischioso per l’uso industriale reale.
Rendere l’adattamento robusto, non spericolato
Per evitare questa deriva, l’articolo sviluppa diverse varianti “robuste” del MRAC che tengono esplicitamente conto di effetti sconosciuti. Gli autori aggiungono termini extra alle leggi di adattamento che richiamano delicatamente i guadagni del controllore verso limiti sicuri o modulano lo sforzo di adattamento in base all’ampiezza dell’errore di tracking. Tra le strategie testate — note come sigma-modification, error-modification e una modifica di controllo ottimale consapevole dell’energia — è quest’ultima a distinguersi. Tramite estese simulazioni al computer, incluse traiettorie oscillatorie rapide, movimenti di pick-and-place, variazioni di massa del 50%, aggiunte improvvise di carico e forti disturbi ad alta frequenza, il MRAC robusto mantiene l’errore di inseguimento piccolo e i segnali di controllo regolari. In scenari in cui i guadagni interni del MRAC convenzionale crescono senza limiti, le versioni robuste li mantengono ben comportati e il moto del braccio stabile. 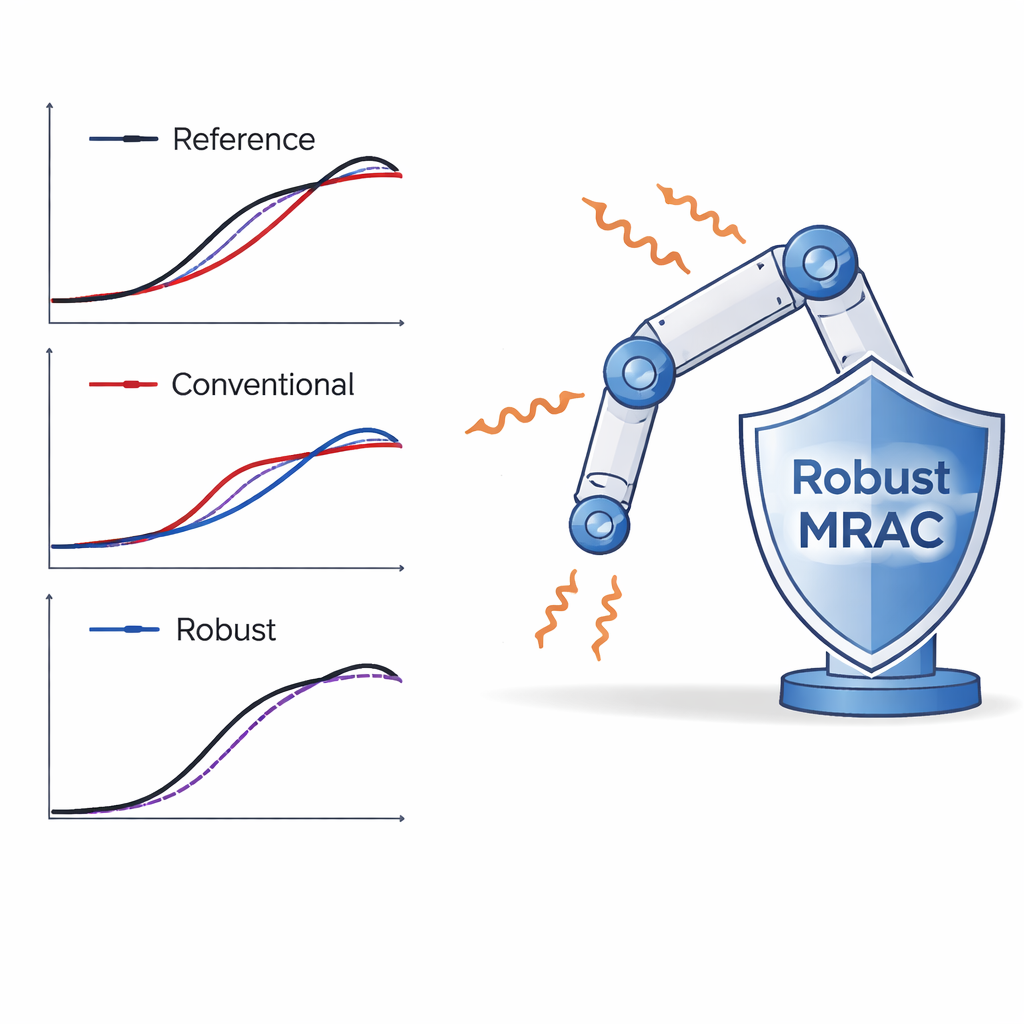
Cosa significa per i robot nel mondo reale
Per un lettore non tecnico, la conclusione è che questo lavoro offre un “pilota automatico” più intelligente per le braccia robotiche industriali — uno che continua ad apprendere e adattarsi, ma senza diventare instabile quando l’ambiente o il carico cambiano. Scomponendo la dinamica complessa a tre giunti in parti più semplici e aggiungendo salvaguardie al processo di apprendimento, il controllore adattivo robusto proposto permette al robot di seguire traiettorie desiderate con precisione usando uno sforzo motore ragionevole, anche in presenza di disturbi e incertezza. Questo avvicina la robotica pratica a sistemi veramente plug-and-play che possono essere riassegnati rapidamente, gestire condizioni impreviste e operare in sicurezza accanto agli umani senza continue regolazioni da parte di esperti.
Citazione: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Parole chiave: controllo manipolatore robotico, controllo adattivo, robotica industriale, inseguimento di traiettoria, controllo robusto