Clear Sky Science · it
Un algoritmo intelligente, bio-ispirato, multi-obiettivo e scalabile per il clustering assistito da UAV nelle reti ad hoc volanti
Sciami di droni più intelligenti in cielo
Immaginate flotte di droni che collaborano per cercare sopravvissuti dopo un terremoto, monitorare incendi boschivi o sorvegliare colture. Per farlo bene, centinaia di robot volanti devono comunicare rapidamente tra loro senza consumare tutte le batterie. Questo articolo esplora come organizzare tali “sciami di droni” in modo che restino connessi, reagiscano in fretta e rimangano più a lungo in volo prendendo spunto da una fonte inaspettata: il comportamento di caccia dell’uccello segretario.
Perché le reti volanti sono difficili da domare
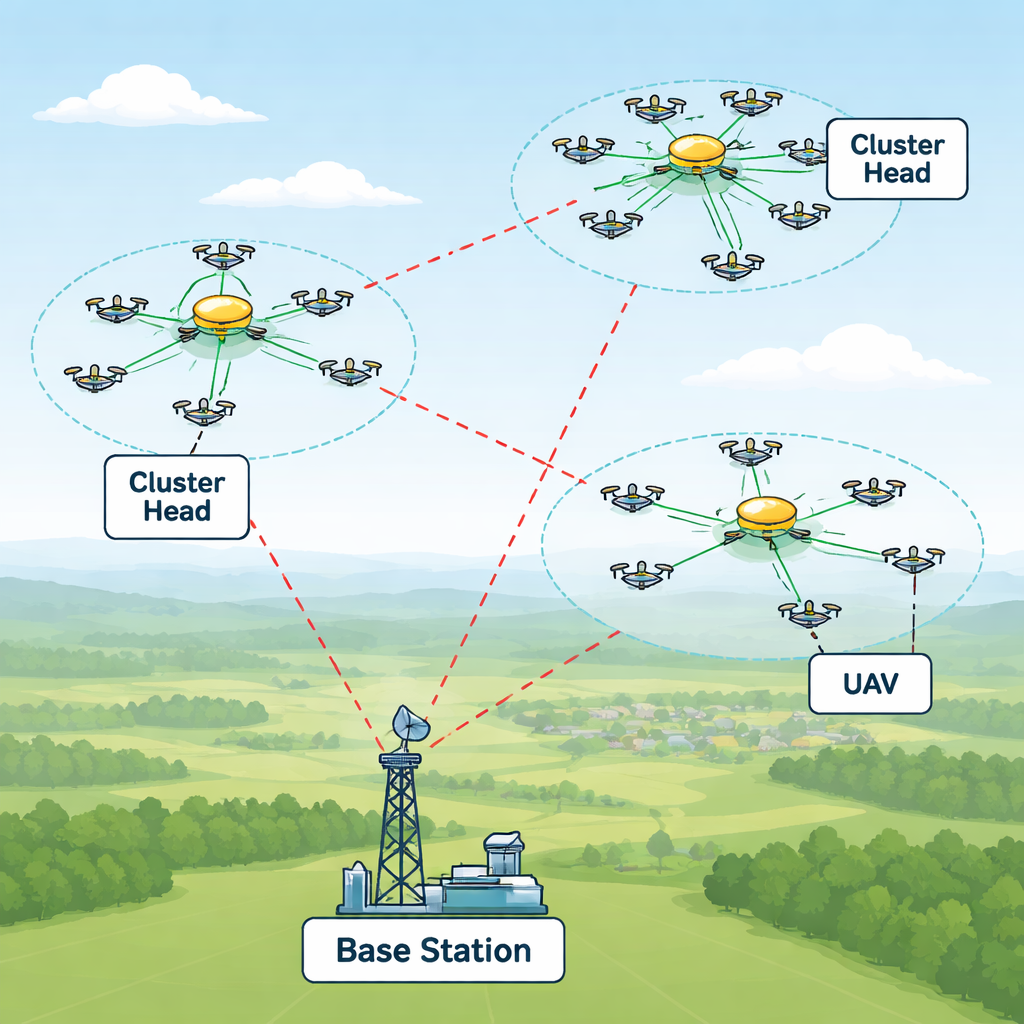
I droni moderni possono formare quelle che gli ingegneri chiamano Flying Ad Hoc Networks, o FANET—reti wireless che esistono solo in cielo. Diversamente dalle reti a terra, questi droni si muovono in tre dimensioni, cambiano direzione rapidamente e dipendono da una capacità di batteria limitata. Se ogni drone provasse a comunicare direttamente con tutti gli altri, i segnali si scontrerebbero, i ritardi aumenterebbero e le batterie si esaurirebbero in fretta. Una soluzione diffusa è formare cluster: piccoli gruppi di droni guidati da un “cluster head” che coordina i messaggi locali e comunica con gli altri capi cluster. Ma scegliere quali droni dovrebbero diventare leader, e quando riassegnare quei ruoli mentre lo sciame si muove, è un puzzle in continuo cambiamento.
Prendere in prestito trucchi da un uccello predatore
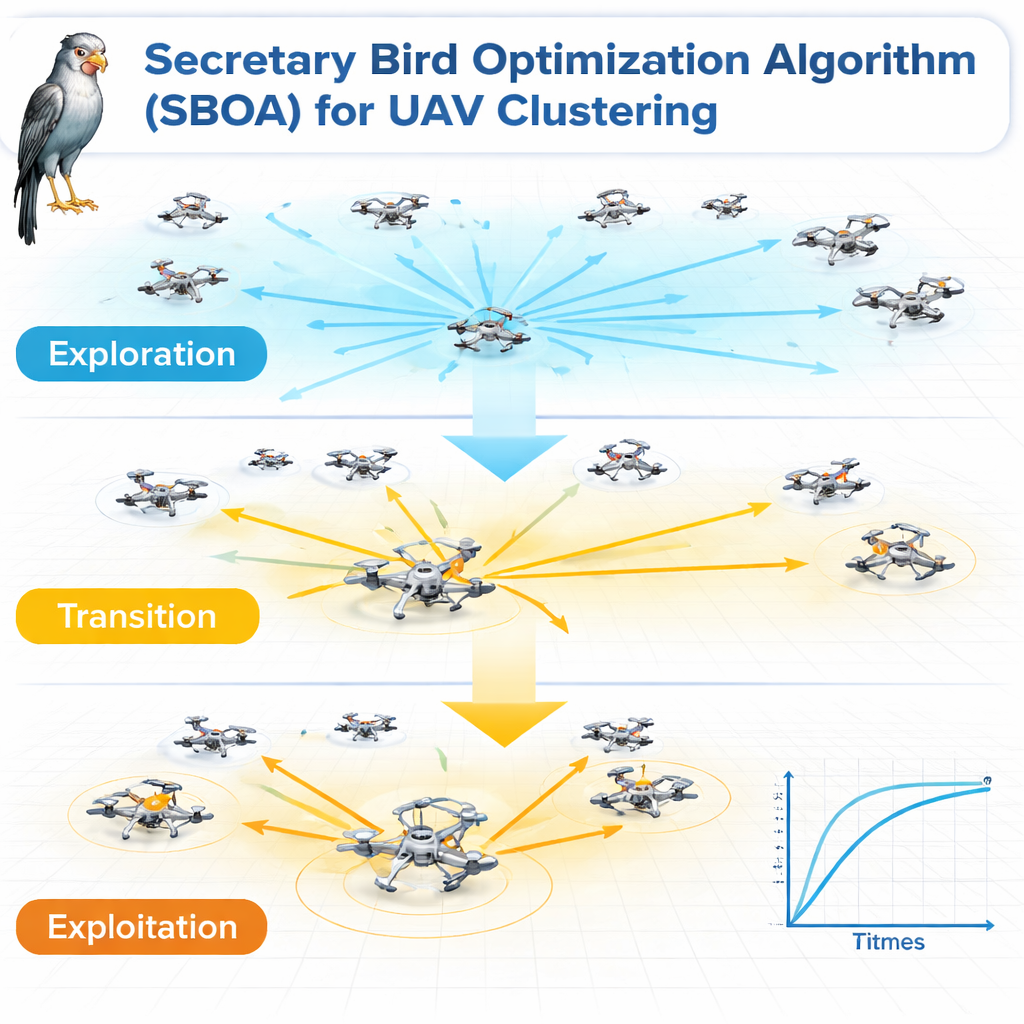
Gli autori si rivolgono a un’idea bio-ispirata chiamata Secretary Bird Optimization Algorithm (SBOA). Gli uccelli segretario sono noti per scandagliare ampie aree, quindi avvicinarsi e colpire le prede con calci precisi. SBOA replica questo schema nel software. Inizia esplorando molte possibili modalità di assegnazione dei cluster head nello sciame, poi si concentra gradualmente sulle opzioni più promettenti. A ogni passaggio pone tre domande: i droni all’interno di ciascun cluster sono abbastanza vicini tra loro? I leader scelti hanno ancora sufficiente carica di batteria? E il carico di lavoro è distribuito in modo equo così che nessun leader sia sovraccaricato mentre altri restano inattivi? Trattando il problema come multi-obiettivo, l’algoritmo bilancia contemporaneamente distanza, energia ed equità.
Testare gli sciami di droni in mondi virtuali
Per verificare se questa strategia ispirata all’uccello aiuta, il team ha costruito simulazioni al computer dettagliate. Hanno rilasciato tra 30 e 160 droni in spazi virtuali 3D di dimensioni diverse, da un chilometro quadrato fino a un ampio box di 15 per 15 chilometri, e li hanno fatti volare usando un modello di mobilità semplice. La portata di comunicazione è stata variata da 100 a 900 metri. Per ciascuno scenario, SBOA ha gareggiato contro tre alternative avanzate che anch’esse imitano comportamenti naturali: Fire Hawk Optimization (FHOA), Portia Spider Optimization (PSOA) e un metodo multi-obiettivo basato sulla fertilizzazione degli spermatozoi (MOSFP). I ricercatori hanno monitorato quante cluster si formavano, quanto rapidamente emergeva una struttura stabile, quanto equamente venivano distribuiti i compiti dei leader e quanta “fitness” ottenevano le soluzioni, combinando distanza, consumo energetico e bilanciamento in un unico punteggio.
Cosa hanno rivelato le simulazioni
In quasi tutti i test, SBOA si è dimostrato superiore. Ha ottenuto regolarmente fino al 15% di fitness in più rispetto ai rivali, con circa il 10% di clustering più efficiente e approssimativamente il 40% di bilanciamento del carico migliore tra i leader. Negli esperimenti basati sul tempo, l’approccio ispirato all’uccello segretario ha raggiunto un pattern di cluster stabile in meno frame di simulazione, soprattutto quando il numero di droni aumentava. Anche in aree 3D grandi e sparse dove i droni sono lontani tra loro, SBOA ha mantenuto oltre l’85% della miglior fitness ottenibile, indicando che può adattarsi sia agli sciami densi sia a formazioni più disperse. Strumenti grafici come surface plot, mappe t-SNE e violin plot hanno confermato che SBOA produceva cluster più compatti e distinti con minore variazione nel carico di lavoro dei leader rispetto agli altri metodi.
Dalla simulazione alle missioni reali
Lo studio conclude che una strategia ispirata all’uccello segretario offre una solida ricetta per gestire gli sciami di droni: mantiene i droni raggruppati in modo efficiente, distribuisce equamente il lavoro tra i leader e reagisce agevolmente ai cambiamenti delle condizioni. Per il lettore non specialistico, questo significa che future flotte di droni per soccorso, agricoltura o monitoraggio potrebbero restare connesse più a lungo, sprecare meno batteria e rispondere in modo più affidabile, semplicemente organizzandosi meglio. Gli autori osservano che fattori del mondo reale—come raffiche di vento, errori GPS e interferenze radio—devono ancora essere testati, e propongono di aggiungere in futuro predizione del moto basata sull’apprendimento e instradamento più intelligente. Ma come passo verso reti aeree robuste, SBOA dimostra che osservare come la natura caccia nella savana può aiutare a rendere i nostri assistenti robotici molto più efficaci in cielo.
Citazione: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
Parole chiave: sciami di droni, comunicazione wireless, algoritmi bio-ispirati, reti energeticamente efficienti, reti ad hoc volanti