Clear Sky Science · it
Localizzazione dei punti di crescita delle piante tramite ricottura del prior basata su epoche
Diserbo più intelligente per un mondo affamato
Con la crescita della popolazione globale, gli agricoltori sono sotto pressione per produrre più cibo usando meno sostanze chimiche e proteggendo l’ambiente. Una grande sfida è eliminare le infestanti senza danneggiare le colture preziose. Questo articolo presenta una nuova strategia di addestramento dell’intelligenza artificiale (IA) che aiuta le macchine a individuare con precisione i punti da cui le piante crescono—i loro punti di crescita—così che strumenti come diserbatori laser o elettrici possano colpire le infestanti con precisione chirurgica e risparmiare le colture.
Perché i punti di crescita sono importanti
Le infestanti sottraggono sole, acqua e nutrienti alle colture, riducendo le rese e minacciando la sicurezza alimentare. Gli agricoltori spesso fanno affidamento sugli erbicidi, ma l’uso eccessivo solleva preoccupazioni per la salute, l’inquinamento e la comparsa di infestanti resistenti. Tecniche nuove come il diserbo con fiamma, elettrico e laser promettono un controllo più pulito distruggendo le piante meccanicamente o con fasci di energia. Per funzionare in sicurezza, questi sistemi devono distinguere le colture dalle infestanti e poi localizzare i minuscoli punti di crescita—spesso alle giunzioni degli steli—dove il danno è più efficace. Molti strumenti di computer vision esistenti possono rilevare intere piante, ma faticano a trovare questi bersagli piccoli con la precisione e la velocità necessarie per l’uso in tempo reale sul campo.
Trasformare semplici indizi cromatici in guida potente
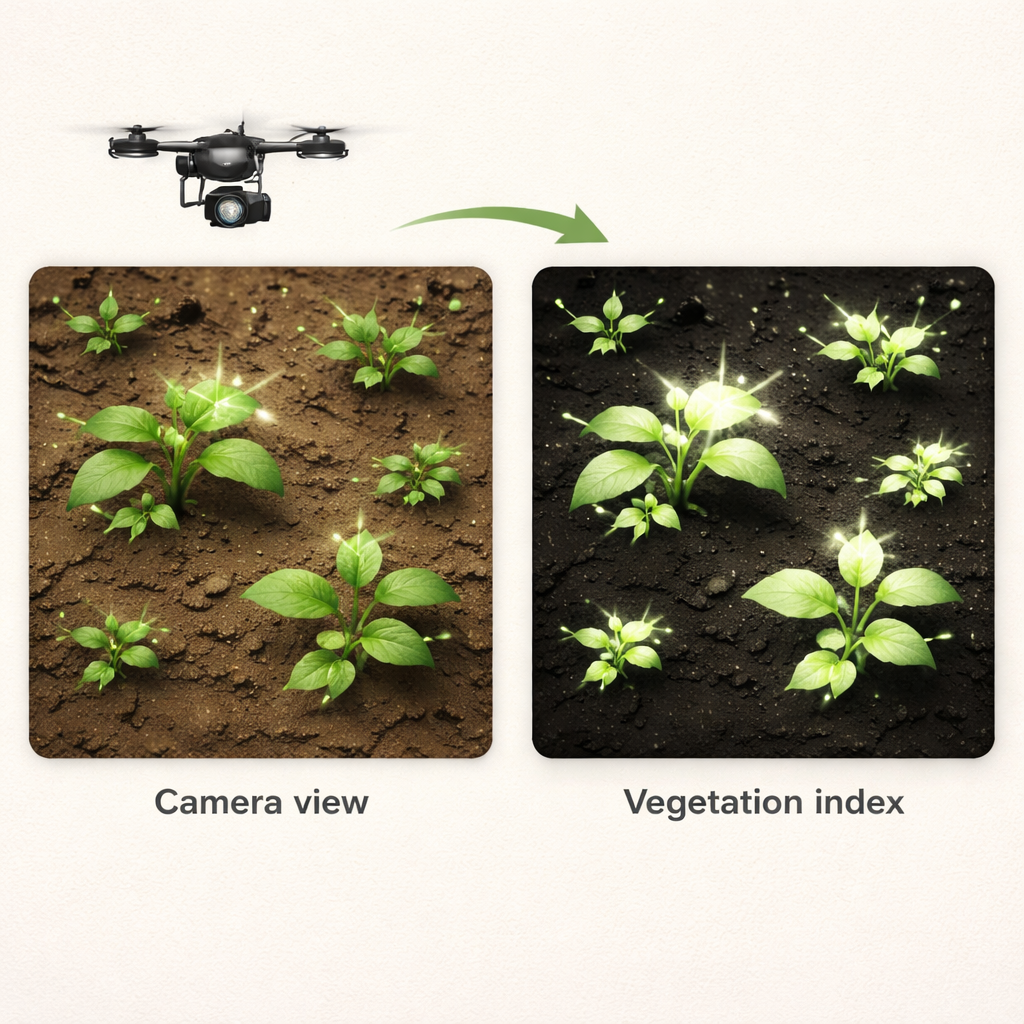
I ricercatori partono da un’idea semplice: le piante verdi appaiono diverse dal terreno bruno nelle foto a colori normali. Una formula cromatica nota, chiamata indice vegetazione ExG-ExR, combina i valori rosso, verde e blu di ogni pixel in modo che i pixel vegetali risaltino come chiari e quelli del suolo appaiano scuri. Questo indice può essere calcolato con qualsiasi fotocamera standard senza sensori aggiuntivi. Nel nuovo sistema, questo indice di vegetazione viene aggiunto ai consueti tre canali di colore come quarto input a un noto rilevatore IA chiamato YOLO-Pose. Questa vista a quattro canali fornisce al modello un quadro più chiaro di dove si trovano le piante, aiutandolo a concentrarsi sulle aree giuste quando cerca i punti di crescita.
Insegnare all’IA dall’easy al difficile
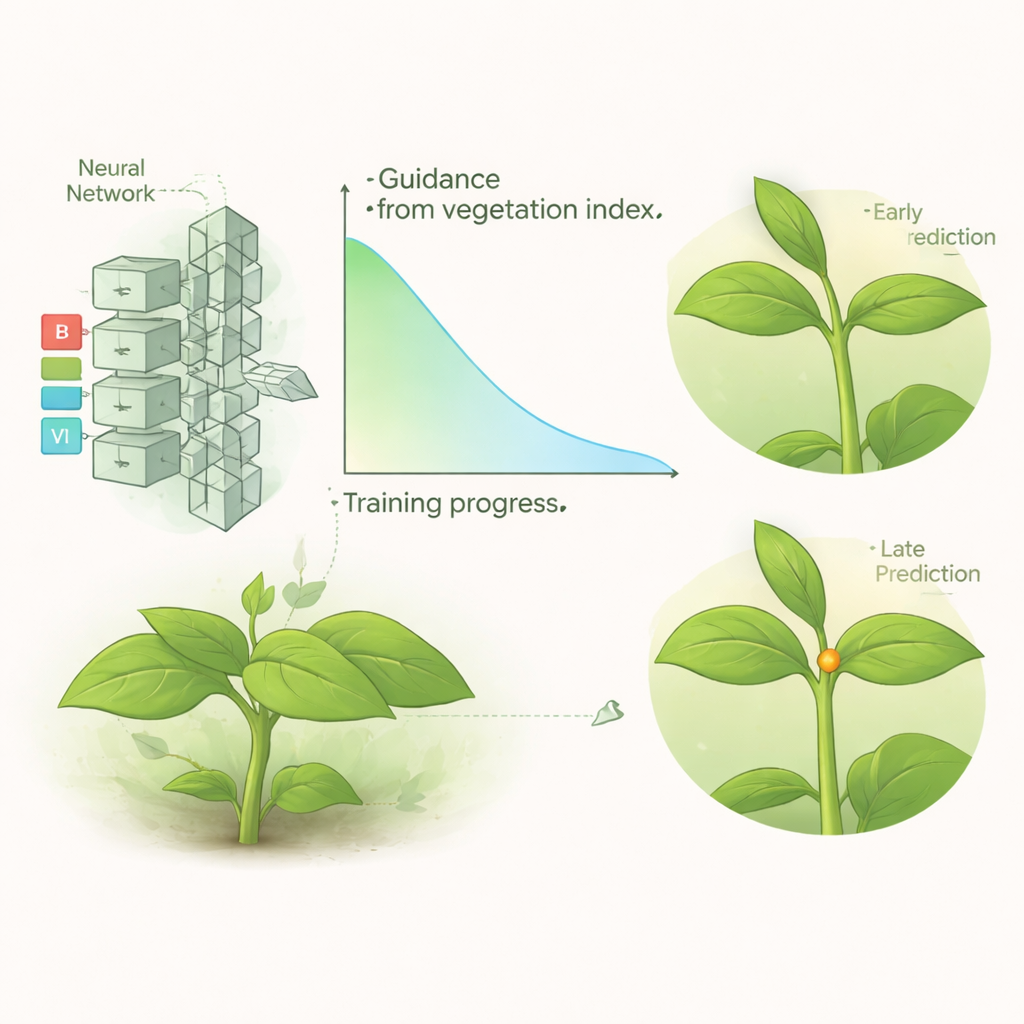
Fornire semplicemente informazioni aggiuntive non basta; il modello deve anche imparare a usarle. Il team introduce una strategia chiamata «annealing del prior basata su epoche» (epoch-based prior annealing, EPA), ispirata al modo in cui imparano gli esseri umani. Nelle prime fasi dell’addestramento, il modello è fortemente incoraggiato a mantenere i punti di crescita predetti all’interno delle regioni vegetali, usando l’indice di vegetazione come guida. Se posiziona un punto nel suolo, l’algoritmo di addestramento impone una penalità più severa; se il punto si trova all’interno dei pixel vegetali, la penalità è più leggera. Man mano che l’addestramento procede, questa guida viene progressivamente ridotta seguendo una scala morbida, permettendo al modello di fare meno affidamento sull’indizio cromatico grezzo e di più sui sottili pattern visivi che ha appreso. Alla fine, l’IA non è più forzata verso i pixel più verdi, che potrebbero non corrispondere ai veri punti di crescita, ma affina autonomamente le loro posizioni.
Dimostrare l’idea nei campi reali
Per testare l’approccio, gli autori hanno addestrato modelli su due dataset del mondo reale contenenti migliaia di immagini di campo con più specie coltivate e molti tipi di infestanti. Hanno confrontato versioni del modello YOLO-Pose con e senza il canale di vegetazione aggiuntivo e la strategia EPA. Aggiungere da solo l’indice di vegetazione ha fornito guadagni modesti, ma combinarlo con EPA ha portato a miglioramenti chiari nella precisione di localizzazione dei punti di crescita—circa 2,4 punti percentuali in un punteggio di rilevamento standard—senza compromettere la capacità del modello di tracciare riquadri intorno alle piante intere. Il costo computazionale aggiuntivo è stato minimo (meno di mezzo punto percentuale del costo totale), rendendo il metodo adatto a robot agricoli con risorse limitate. Test in diverse condizioni di illuminazione, livelli di umidità del suolo e persino con diverse versioni di YOLO hanno mostrato che la strategia è ampiamente utile, sebbene sensibile a quanto forte e per quanto tempo viene applicata la guida prioritaria.
Che cosa significa per l’agricoltura futura
Per i non specialisti, il messaggio chiave è che una piccola modifica nel modo di addestrare l’IA—usare inizialmente un semplice indizio basato sul colore e poi lasciare gradualmente che il modello decida da solo—può rendere le macchine molto più abili a trovare i punti esatti sulle piante dove l’intervento è efficace. Questo miglioramento nella localizzazione dei punti di crescita potrebbe aiutare i futuri robot diserbatori a indirizzare impulsi elettrici o fasci laser precisamente sulle infestanti risparmiando le colture, riducendo l’uso di erbicidi e l’impatto ambientale. La stessa strategia può essere adattata ad altri tipi di segnali vegetali e modelli IA, aprendo la strada a sistemi di visione più intelligenti e affidabili che supportano un’agricoltura sostenibile e ad alta precisione.
Citazione: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
Parole chiave: agricoltura di precisione, controllo delle infestanti, computer vision, apprendimento profondo, punti di crescita delle piante