Clear Sky Science · it
Un algoritmo di scheduling multi-agente basato su reinforcement learning che integra la modellazione strutturale di grafi di stato e di compiti per il dispatching in ride-sharing
Perché un ride-sharing più intelligente è importante per la vita cittadina
Chiunque abbia aspettato troppo a lungo un’auto di ride-hailing, o abbia visto veicoli vuoti sfrecciare oltre angoli affollati, ha avuto modo di constatare quanto sia difficile coordinare il trasporto urbano in tempo reale. Questo studio presenta un nuovo sistema di dispatching basato sull’intelligenza artificiale, pensato per abbinare passeggeri e veicoli ride-sharing più rapidamente ed efficacemente, riducendo i chilometri inutili e accorciando i tempi di attesa nel traffico cittadino denso e in rapido mutamento.
Dai semplici abbinamenti al traffico cittadino intrecciato
Il ride-hailing è nato da un’idea semplice: un conducente, un passeggero, un viaggio. Le strade delle città di oggi appaiono molto diverse. Le piattaforme gestiscono migliaia di veicoli e utenti contemporaneamente, spesso raggruppando più passeggeri nella stessa auto e instradando flotte attraverso interi quartieri. La domanda è disomogenea — in centro le richieste possono essere numerosissime mentre in altre aree regna calma — e tutto cambia minuto per minuto. Le regole tradizionali o le strategie semplici del tipo “auto più vicina” faticano in questo scenario, causando lunghe attese, bassa utilizzazione dei veicoli e deviazioni inutili. La figura 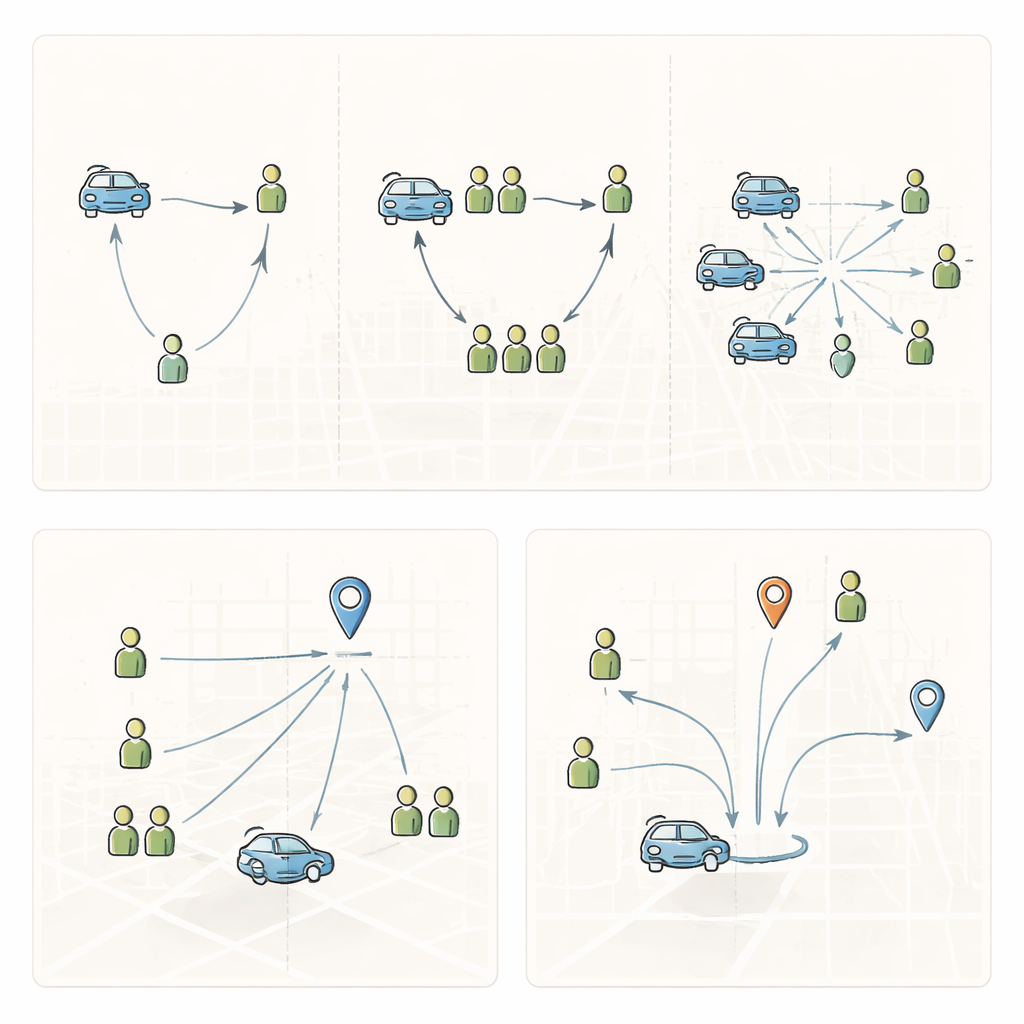
Due mappe connesse invece di un unico sfondo confuso
Gli autori propongono un nuovo framework chiamato DualG-MARL che tratta il problema del dispatching come due mappe sovrapposte. Una mappa descrive i veicoli: dove si trovano, quanti posti hanno e se sono liberi o già con passeggeri a bordo. L’altra mappa descrive le richieste di corsa: chi vuole viaggiare, da dove, verso dove e a che ora. Ogni mappa è modellata come un grafo, dove i nodi rappresentano auto o richieste e gli archi collegano elementi vicini nello spazio e nel tempo. Mantenendo le informazioni su veicoli e passeggeri in grafi separati ma collegati, il sistema preserva la struttura di ciascuna parte invece di mescolare tutto in un’unica immagine confusa.
Come l’IA impara ad abbinare passeggeri e auto
Sovrapposto a questi grafi gemelli, il sistema usa una classe di metodi di apprendimento automatico nota come reinforcement learning multi-agente. Ogni veicolo è trattato come un decisore indipendente, o “agente”, che sceglie tra le richieste nelle vicinanze. Gli agenti condividono un obiettivo comune: ridurre i tempi di attesa, evitare deviazioni eccessive e mantenere le auto produttivamente occupate. Il modello esplora entrambi i grafi per estrarre pattern, quindi impiega un meccanismo di attenzione — uno strumento di IA che mette in evidenza le connessioni più rilevanti — per collegare auto e passeggeri adatte attraverso le due mappe. Per mantenere le decisioni rapide e stabili, non considera tutte le possibili coppie. Invece costruisce una lista ristretta dei migliori candidati per ogni veicolo (il set Top-K), filtrata da regole rigide come la capacità dei posti, il ritardo di ritiro e la lunghezza di deviazione accettabile. Un learner centralizzato valuta le prestazioni dell’intera flotta, mentre le singole auto seguono regole locali semplici durante l’operazione in tempo reale. La figura 
Testare il sistema sui viaggi reali di New York City
I ricercatori hanno testato DualG-MARL su ampi dati di viaggio della Taxi and Limousine Commission di New York City, concentrandosi su Manhattan e Queens. Hanno confrontato il loro metodo con diverse soluzioni esistenti, incluse regole progettate a mano, ottimizzazione matematica e dispatcher avanzati basati sull’apprendimento come CoopRide. In entrambi i borough, il nuovo sistema ha stabilito nuovi standard su quattro misure chiave: ha ridotto il tempo medio che i passeggeri trascorrono in attesa del pickup, aumentato la quota di richieste di corsa soddisfatte, incrementato la frazione di tempo in cui i veicoli trasportano clienti e ridotto leggermente la distanza extra causata dalla condivisione. È importante notare che questi miglioramenti non hanno comportato un aumento proibitivo dei costi di calcolo: limitando l’attenzione a un insieme curato di abbinamenti promettenti, il metodo è rimasto abbastanza veloce per l’uso in tempo reale.
Cosa significa questo per i passeggeri e per le città
In termini semplici, lo studio mostra che rappresentare il sistema di ride-hailing di una città come due reti strutturate — una per i veicoli e una per i passeggeri — e farle interagire tramite un processo di apprendimento accuratamente progettato può rendere il pooling più intelligente e reattivo. Per i passeggeri questo si traduce in attese più brevi e pickup più affidabili; per i conducenti e le piattaforme significa un miglior utilizzo dei veicoli e meno tragitti a vuoto; e per le città suggerisce un futuro in cui le strade esistenti possono spostare più persone con meno auto e meno congestione. Gli autori suggeriscono che idee analoghe basate sui grafi e sul multi-agente potrebbero in futuro estendersi ad altri servizi, dalle flotte di taxi autonome alla risposta alle emergenze, offrendo un modo più ordinato per gestire i flussi complessi e mutevoli della vita urbana moderna.
Citazione: Sha, J., Song, M., Sui, G. et al. A multi-agent reinforcement learning scheduling algorithm integrating state graph and task graph structural modeling for ride-sharing dispatching. Sci Rep 16, 5461 (2026). https://doi.org/10.1038/s41598-026-35004-8
Parole chiave: dispatching per ride-sharing, reinforcement learning multi-agente, reti neurali su grafo, mobilità urbana, matching dinamico