Clear Sky Science · it
Ricostruzione 3D di strutture in acque basse mediante calibrazione diretta del sistema ed estrazione di linee laser deboli
Portare in vista mondi sommersi nascosti
Molte delle tracce più affascinanti del nostro passato giacciono oggi sott'acqua—relitti, città sommerse e rovine costiere. Per esplorare e preservare digitalmente questi siti, i ricercatori hanno bisogno di mappe 3D accurate di ciò che si trova sul fondale. Tuttavia, in acque poco profonde, luce solare intensa, sabbia in sospensione e l'acqua stessa rendono le misure precise sorprendentemente difficili. Questo articolo presenta un nuovo modo di eseguire scansioni e ricostruire modelli 3D dettagliati di strutture subacquee usando un laser blu a bassa potenza, anche in condizioni illuminate dal sole e rumorose dove i metodi esistenti in gran parte falliscono.
Perché è così difficile scansionare i mari poco profondi
Creare un modello digitale 3D di una scena significa solitamente assemblare milioni di punti nello spazio—quello che gli scienziati chiamano una nuvola di punti. Sulla terraferma, laser e fotocamere fanno questo in modo affidabile. Sott'acqua, però, la situazione si complica. L'acqua piega e disperde la luce, tingendo le scene di un alone blu-verde e sfumando i contorni. La luce solare che passa attraverso le onde crea motivi luminosi in movimento, detti caustiche, che possono sovrastare la sottile linea di un laser a bassa potenza. Microparticelle aggiungono un velo di foschia e riflessi intermittenti. Di conseguenza, molti sistemi subacquei attuali funzionano solo di notte, con luce molto bassa o in condizioni attentamente controllate, che non corrispondono al comportamento reale degli oceani.
Un laser blu rotante come pennello 3D
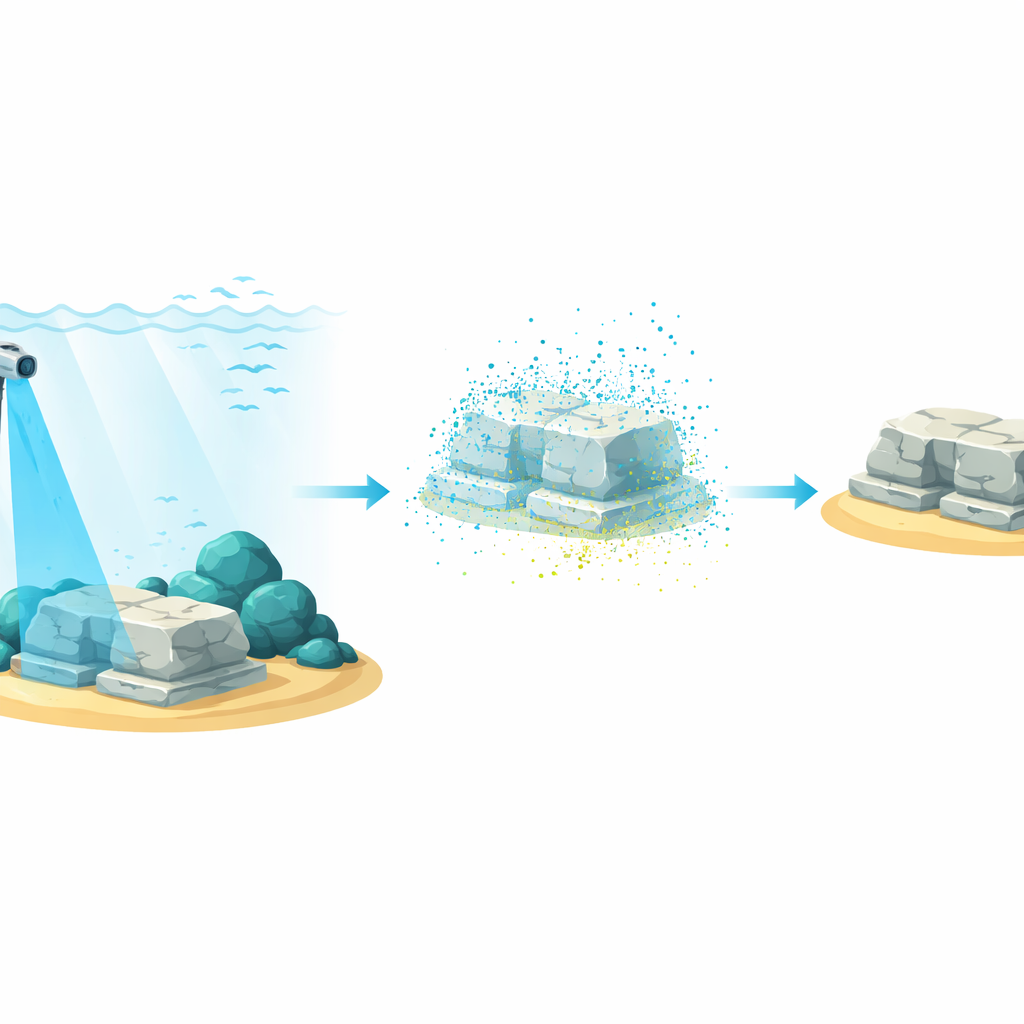
Gli autori hanno costruito uno scanner compatto e impermeabile che funziona come un pennello 3D. Proietta un sottile foglio verticale di luce laser blu che ruota mentre il braccio del dispositivo gira lentamente. Ovunque questo foglio tocchi una roccia, una parete o un reperto, traccia una curva luminosa. Una fotocamera montata accanto al laser cattura immagini a ogni piccolo passo di rotazione. Combinando tutte queste viste, il sistema può ricostruire una densa nuvola di punti 3D dell'ambiente circostante, completa di colore approssimativo, che può poi essere trasformata in una superficie per visualizzazioni o realtà virtuale.
Insegnare al sistema dove vive ogni pixel nello spazio
Una sfida centrale in questi sistemi è la calibrazione: capire come ogni pixel della fotocamera si allinei con le coordinate del mondo reale. Gli approcci tradizionali si basano su modelli matematici dettagliati della fotocamera e dell'acqua, con dozzine di parametri da regolare, che li rendono fragili e suscettibili a errori. Qui, i ricercatori adottano una via centrata sui dati. Imparano direttamente una mappatura dai pixel dell'immagine alle posizioni 3D scansionando una parete coperta da una griglia nota. Sono necessari solo poche centinaia di punti campione scelti con cura. Una volta memorizzata in una tabella di consultazione, questa mappa permette allo scanner di convertire qualsiasi pixel laser rilevato in un punto 3D senza risolvere esplicitamente complicate equazioni della fotocamera.
Raddrizzare e amplificare una traccia blu debole
Poiché la calibrazione viene eseguita in aria, il filmato sott'acqua deve prima essere “raddrizzato” per annullare la deviazione causata dalla rifrazione alla superficie dell'acqua. Il team misura questa deformazione usando immagini di una griglia che attraversa aria e acqua, quindi calcola come ogni pixel sott'acqua si sposterebbe se visto in aria. Dopo questo dewarping, inizia il vero lavoro: trovare una linea blu debole, spesso interrotta, in un'immagine rumorosa. Il metodo prima calcola un valore di “blluezza” per ogni pixel, tarato in modo che la luce vicina alla tonalità blu del laser risalti. Poi valuta quanto ogni pixel è più blu rispetto ai vicini e utilizza un classificatore di apprendimento automatico per formare una mappa approssimativa in bianco e nero dei pixel probabilmente appartenenti al laser.
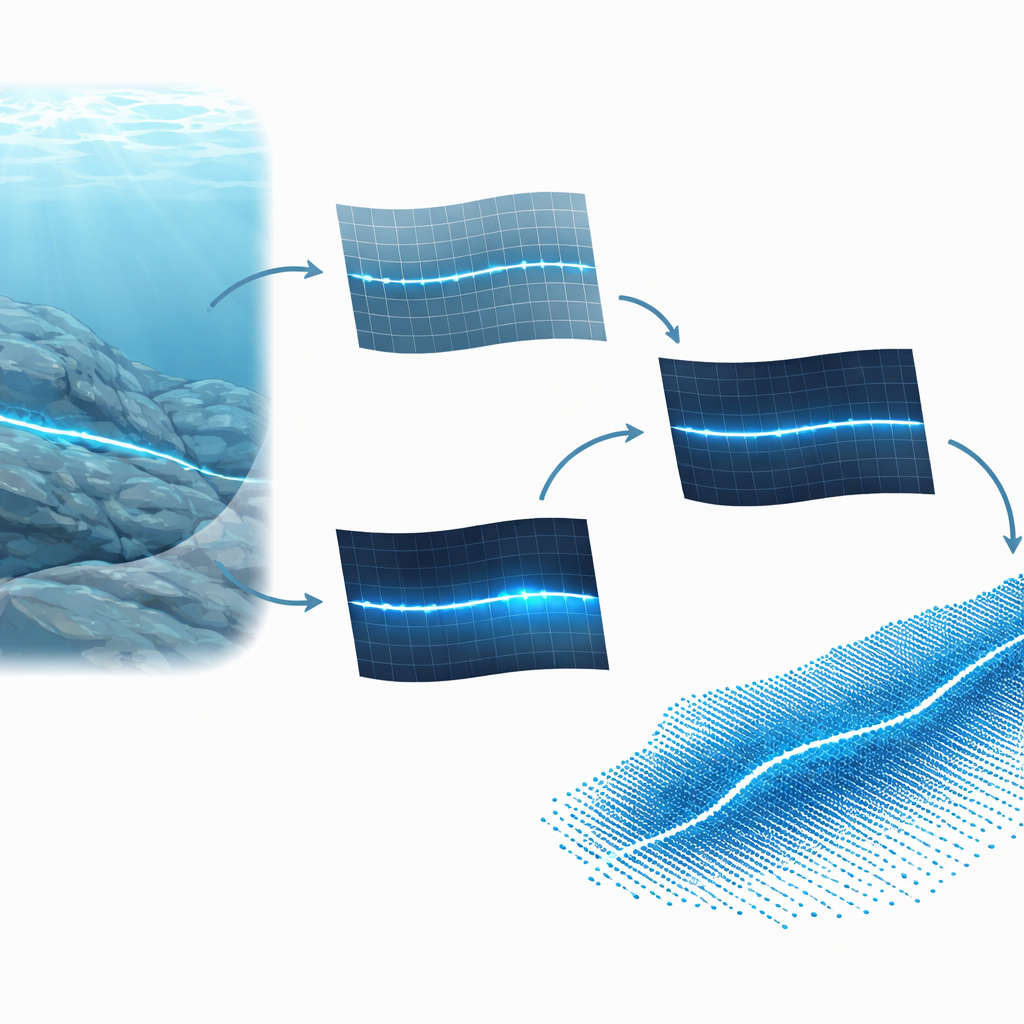
Dai puntini rumorosi a forme 3D pulite
Quella prima mappa contiene ancora molti falsi positivi dovuti a sabbia, riflessi e caustiche. Per ripulirla, il sistema cerca pattern di linee rette usando una tecnica classica che vota per possibili linee in base alle posizioni dei pixel. Mantiene solo le linee che corrispondono all'orientamento atteso del laser. Viene quindi adattata una curva liscia attraverso i punti rimanenti, e la “fiducia” di ogni pixel viene aumentata se giace vicino a questa curva e ha una forte componente di blu. Per ogni riga dell'immagine, il pixel con la massima fiducia viene scelto come parte della traccia laser finale. Alimentando queste tracce ripulite, passo dopo passo, nella tabella di calibrazione si ottiene una nuvola di punti 3D colorata dall'immagine originale della fotocamera.
Quanto funziona in acqua reale?
Gli autori hanno testato il loro sistema in vasche e in un mare poco profondo a circa cinque metri di profondità, con illuminazione che va da livelli interni tenui a un sole di mezzogiorno intenso con decine di migliaia di lux. Hanno scansionato oggetti con dimensioni precisamente note—una sfera e una forma acrilica personalizzata—e confrontato le misure con la verità di riferimento. A distanze fino a circa mezzo metro, l'errore tipico rimaneva sotto una frazione di millimetro anche sotto luce intensa, e restava entro pochi decimi di millimetro a distanze maggiori finché la linea laser diventava quasi invisibile all'occhio. I metodi esistenti progettati per condizioni di oscurità non riuscivano a ricostruire scene a questi livelli di luce elevata.
Cosa significa per l'esplorazione dei siti subacquei
In sostanza, questo lavoro dimostra che la mappatura 3D accurata di strutture subacquee poco profonde non richiede laser ingombranti ad alta potenza né oscurità perfettamente controllata. Correggendo con cura la deviazione della luce dovuta all'acqua, valorizzando il colore del laser e usando una calibrazione diretta che collega i pixel alle posizioni reali, il sistema può reliably estrarre una debole traccia blu da scene rumorose illuminate dal sole. Sebbene le prestazioni diminuiscano in condizioni estremamente luminose e con alcuni colori degli oggetti, l'approccio apre la strada a scansioni più routine e a basso costo di barriere coralline, muri portuali e rovine sommerse, aiutando scienziati e conservatori a costruire copie digitali fedeli dei mondi sommersi.
Citazione: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
Parole chiave: scansione 3D subacquea, ricostruzione da linea laser, mappatura di mari poco profondi, immagini in cloud di punti, archeologia subacquea