Clear Sky Science · it
Un dataset temporizzato multi-sensore di droni acquisito da più radar e ricevitore RF
Perché osservare il cielo è importante
I droni si sono rapidamente evoluti da giocattoli e strumenti per il cinema a macchine fondamentali per consegne, ispezioni, agricoltura e altro. Ma gli stessi velivoli leggeri che ci aiutano possono anche essere usati in modo improprio per spionaggio, contrabbando o perfino attacchi. Fermare droni pericolosi è difficile perché sono piccoli, veloci e spesso volano in scenari reali affollati. Questo articolo presenta un nuovo dataset aperto che aiuta scienziati e ingegneri a costruire sistemi più intelligenti per individuare, tracciare e identificare i droni usando le loro impronte radio invisibili piuttosto che affidarsi solo all’aspetto visivo o ai suoni.
Ascoltare i droni con onde invisibili
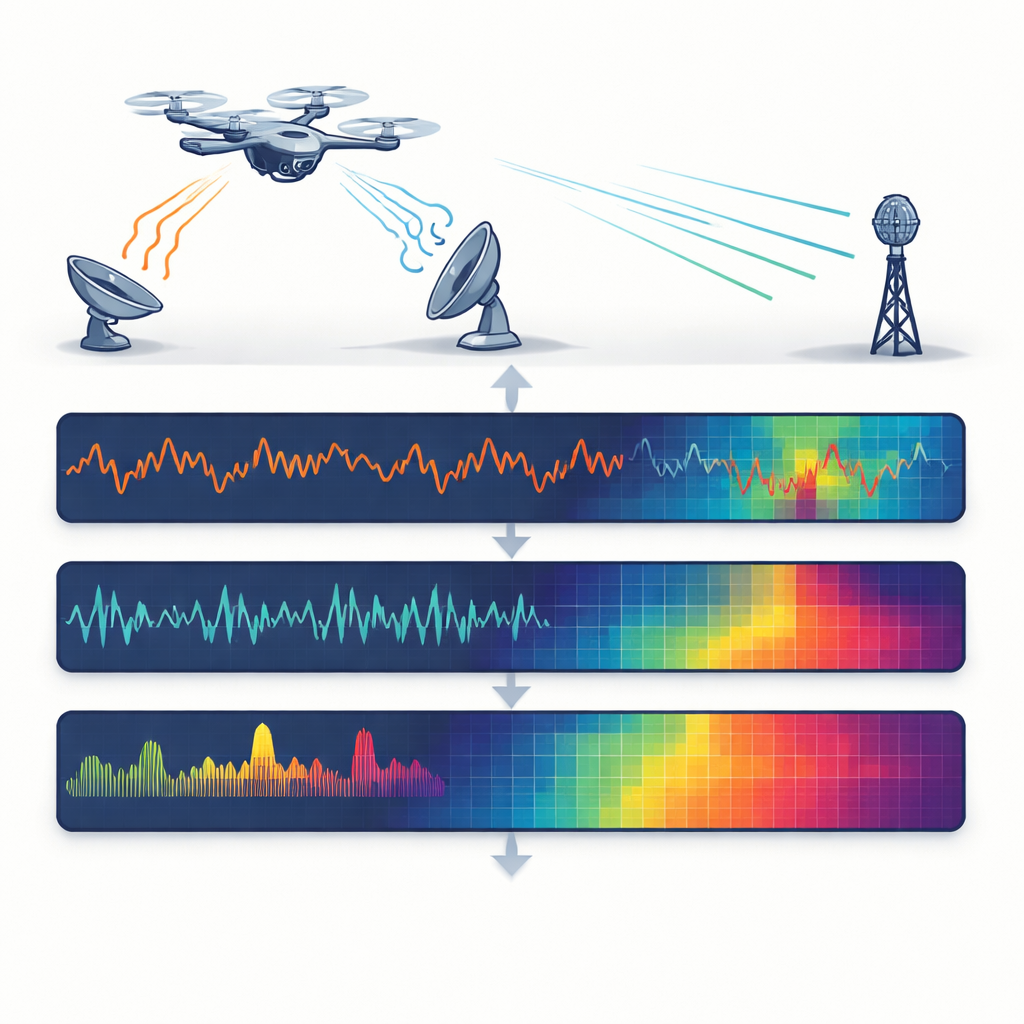
Invece di basarsi su videocamere o microfoni, i ricercatori si concentrano sulle onde radio, che funzionano giorno e notte e anche in nebbia, pioggia o controluce. Utilizzano tre diversi sensori a base radio contemporaneamente: un radar che emette un tono continuo per percepire il moto, un altro radar che effettua una scansione di frequenza per misurare distanza e velocità, e un ricevitore radio che semplicemente ascolta i segnali di controllo e video del drone. Ogni sensore vede il drone in modo diverso—attraverso le piccole vibrazioni delle pale rotanti, la variazione della distanza dal sensore o la struttura del collegamento wireless—simile a combinare vista, udito e tatto per ottenere un quadro più completo.

Costruire un campo di prova accuratamente controllato
Per creare dati affidabili, il team ha fatto volare quattro droni commerciali popolari e ha collocato un semplice riflettore angolare metallico come riferimento non-drone in un campo aperto privo di edifici di grandi dimensioni. Tutti i bersagli hanno hoverato alla stessa altezza e si sono trovati di fronte a un gruppo di sensori montati insieme su treppiedi, in modo che ogni dispositivo osservasse la scena da quasi esattamente lo stesso angolo. I droni sono stati misurati a distanze da 2 a 30 metri con incrementi di 2 metri, con 500 registrazioni ripetute per ogni combinazione di tipo di drone, distanza e sensore. Questa progettazione accurata rende possibile studiare come cambia il rilevamento al variare della distanza e confrontare diversi modelli che differiscono per dimensioni, peso e costruzione.
Far respirare i diversi sensori all’unisono
Un punto di forza chiave del dataset è che i tre sensori sono sincronizzati temporalmente via software. Tutti i dispositivi sono controllati da un unico programma che li attiva insieme e salva le loro uscite in modo allineato. Ogni registrazione di un sensore ha una corrispondente proveniente dagli altri, allineata mediante un indice condiviso anziché da complessi orologi hardware. Per i due radar, il sistema cattura sia segnali grezzi sia mappe elaborate che mostrano come l’energia riflessa si distribuisce su distanza e velocità. Per il ricevitore radio, conserva il segnale di comunicazione grezzo. Questa temporizzazione condivisa permette ai ricercatori di fondere direttamente le informazioni tra sensori—ad esempio correlando un tremolio nelle pale con un impulso nel collegamento di controllo—senza dover faticare a riallineare i dati in seguito.
Dalle onde grezze a immagini pronte per le macchine
Poiché gli strumenti moderni di rilevamento spesso si basano sul deep learning, gli autori convertono anche le misure grezze in viste simili a immagini che i computer possono facilmente digerire. Per il radar a tono continuo estraggono i pattern di frequenza prodotti dalle eliche rotanti, noti come micro-movimenti, e li rappresentano come semplici spettri. Per il radar a scansione producono immagini distanza–velocità colorate che evidenziano dove e come si muove il drone, dopo aver rimosso il clutter di fondo. Per il ricevitore radio calcolano come la potenza si distribuisce sulle frequenze, creando impronte digitali dello stile di comunicazione di ciascun drone. Ogni file grezzo ha un file immagine corrispondente, così gli scienziati possono scegliere se lavorare a livello di segnale o inserire direttamente i dati in reti neurali standard basate su immagini.
Dimostrare che più occhi sono meglio di uno
Per mostrare che il dataset non è solo interessante ma anche utile, il team ha addestrato una nota rete di riconoscimento d’immagini separatamente sulle immagini di ciascun sensore e poi sulle combinazioni fuse dei tre. Come previsto, i radar faticano di più man mano che il drone si allontana: i segnali riflessi si indeboliscono e l’accuratezza della classificazione cala con la distanza. Il ricevitore radio si comporta meglio a distanza, ma alcuni droni condividono bande di comunicazione quasi identiche e risultano difficili da distinguere con quel solo sensore. Quando i ricercatori uniscono le tre viste in ingressi compositi, le prestazioni migliorano in generale, soprattutto per i droni più piccoli e più difficili da rilevare. Questo dimostra che l’informazione multi-sensore sincronizzata può compensare i punti ciechi di ciascun dispositivo.
Cosa significa per uno spazio aereo più sicuro
In termini semplici, gli autori hanno costruito un dettagliato “campo di addestramento” pubblico dove algoritmi intelligenti possono imparare a riconoscere i droni usando molteplici tipi di occhi radio contemporaneamente. Rilasciando sia i segnali grezzi sia le immagini pronte all’uso, insieme al codice di esempio, abbassano la barriera per chiunque voglia progettare sistemi di rilevamento che funzionino in modo affidabile in condizioni variabili e a diverse distanze. Col tempo, gli strumenti basati su questo dataset potrebbero aiutare aeroporti, strutture critiche e autorità cittadine a distinguere meglio i droni amichevoli da quelli sospetti, rendendo lo spazio aereo a bassa quota più sicuro senza dipendere esclusivamente da telecamere o osservatori umani.
Citazione: Han, SK., Jung, YH. A Time-Synchronized Multi-Sensor drone dataset acquired from multiple radars and RF receiver. Sci Data 13, 407 (2026). https://doi.org/10.1038/s41597-026-06802-6
Parole chiave: rilevamento droni, rilevamento radar, segnali a radiofrequenza, fusione di sensori, dataset aperto