Clear Sky Science · it
SPICE-HL3: dataset con fotocamera a singolo fotone, inerziale e stereo per l’esplorazione dei paesaggi lunari ad alte latitudini
Perché le ombre lunari sono importanti per i robot
Le future missioni alle regioni polari della Luna puntano a sfruttare acqua ghiacciata e altre risorse, ma queste aree sono anche tra i luoghi più visivamente ingannevoli del Sistema Solare. Ombre lunghe e mobili, riflessi accecanti e quasi totale oscurità possono facilmente ingannare le fotocamere di un robot. Questo articolo presenta SPICE‑HL3, un nuovo dataset open creato in un ambiente indoor che ricrea “un pezzo di Luna”, che permette agli scienziati di tutto il mondo di testare come i robot vedono e navigano in queste dure condizioni polari, compresa una fotocamera all’avanguardia a singolo fotone in grado, letteralmente, di vedere al buio.
Costruire un pezzo dei poli lunari sulla Terra
Poiché i dati reali dai poli lunari sono scarsi e costosi da ottenere, il team ha costruito un banco di prova controllato chiamato LunaLab presso l’Università del Lussemburgo. Si tratta di un paesaggio indoor di 11 per 8 metri riempito di ghiaia basaltica grossolana, massi e crateri, circondato da pareti e soffitti neri per imitare l’ambiente assorbente di luce e privo di aria della Luna. Un potente faretto mobile imita il Sole molto basso sull’orizzonte, producendo ombre lunghe e nette e grandi differenze di luminosità tra i pendii illuminati e gli interni dei crateri completamente bui. Variando la posizione e l’intensità della lampada, i ricercatori hanno riprodotto quattro regimi di illuminazione distinti — riferimento, mezzogiorno, alba/tragitto e notte — simili a quelli che un rover sperimenterebbe nel corso di un giorno lunare vicino ai poli. 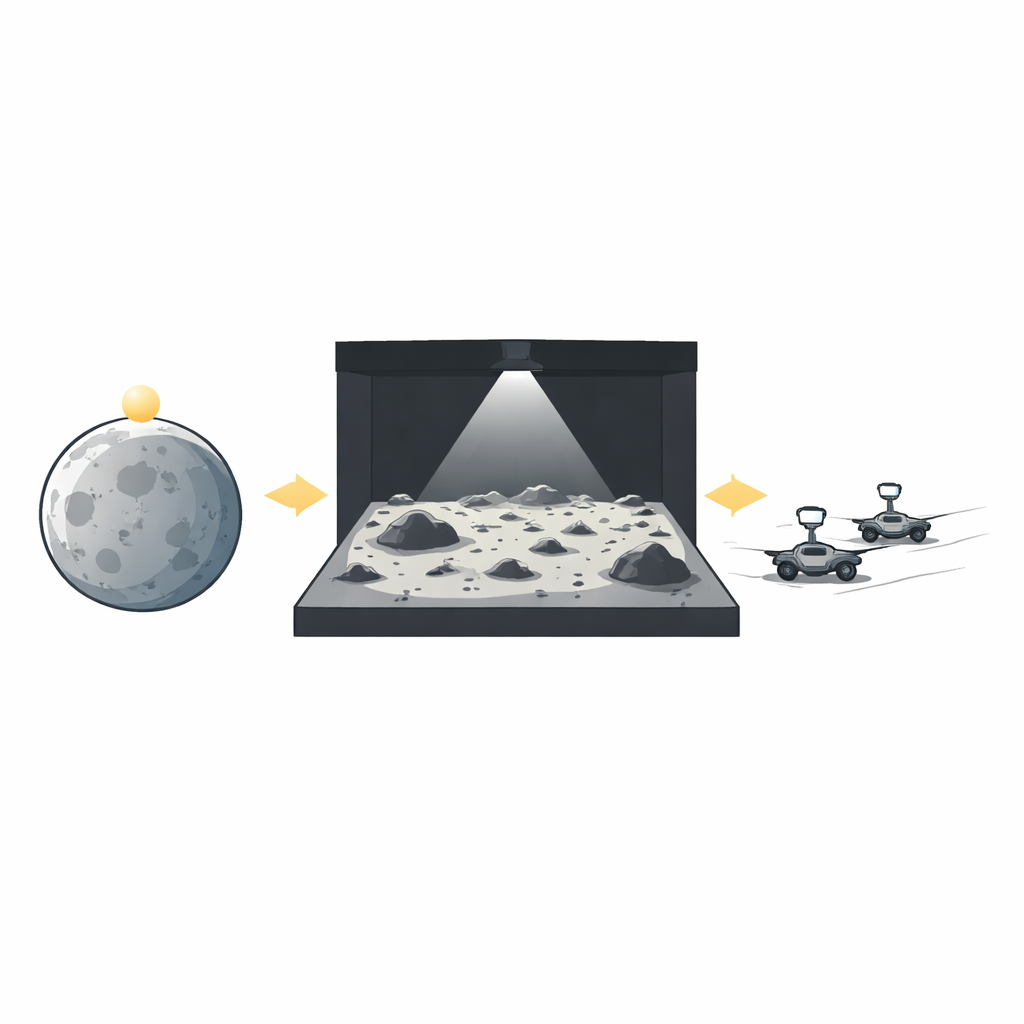
Rover, sensori e una fotocamera che conta singoli fotoni
Il dataset è stato raccolto utilizzando due piccoli rover su ruote che trasportavano diverse combinazioni di telecamere e sensori di movimento. Un rover montava una fotocamera monocromatica convenzionale e una nuova fotocamera a diodi a valanga per singolo fotone (SPAD); l’altro trasportava una fotocamera stereo a colori con profondità e un sensore di movimento integrato. Entrambi i rover registravano la rotazione delle ruote e i dati inerziali, mentre un sistema di motion‑capture dall’alto tracciava le loro posizioni vere con precisione sub‑millimetrica. La fotocamera SPAD è la tecnologia di punta: invece di misurare la luce come un valore di intensità continua, ogni pixel segnala se ha rilevato singoli fotoni, con velocità e sensibilità estremamente elevate. Combinando molte di queste istantanee binarie ultra‑veloci, il sistema può ricostruire immagini che conservano i dettagli anche in scene molto fioche o ad altissimo contrasto dove le fotocamere tradizionali tendono a sfocare o a saturare.
Riprese di guida in stile lunare in molte varianti
Per offrire ai ricercatori un terreno di prova ricco, gli autori hanno progettato sette tipi di traiettorie per i rover, da lunghi tragitti con soste che imitano la guida planetaria prudente a brevi corse continue in diverse direzioni rispetto al Sole artificiale (verso il Sole, in direzione opposta e lateralmente) e stretti giri sul posto. Hanno ripetuto questi percorsi a velocità da camminata lenta e a velocità dieci volte maggiori, sotto più condizioni di illuminazione, talvolta con i fari del rover accesi e talvolta spenti. In totale, SPICE‑HL3 contiene 88 sequenze sincronizzate nel tempo, quasi 1,3 milioni di immagini e dati di movimento e verità a terra corrispondenti. Le immagini spaziano da scene statiche ideali per analisi approfondite a sequenze veloci che mettono alla prova motion blur e controllo dell’esposizione. Tutto è organizzato in una struttura di file chiara, con file di calibrazione che descrivono esattamente come ogni fotocamera e sensore è orientato e come i loro orologi sono sincronizzati nel tempo.
Mettere alla prova la visione a singolo fotone
Oltre a rilasciare i dati, il team ha verificato la qualità e l’utilità delle immagini registrate. Hanno confrontato come la SPAD, la fotocamera monocromatica e la fotocamera stereo hanno gestito alcune delle situazioni visive più difficili: percorsi al crepuscolo e di notte, e corse in cui il rover affrontava direttamente il “Sole”. Utilizzando semplici misure di qualità dell’immagine e ispezione visiva, hanno rilevato che la fotocamera a singolo fotone preservava in modo consistente la struttura sia nelle regioni luminose sia in quelle in ombra, manteneva un ampio intervallo di livelli di luminosità e rimaneva stabile in una varietà di condizioni. Le fotocamere convenzionali rendevano bene quando la scena era ben illuminata, ma perdevano dettagli in aree molto scure o bruciavano le alte luci vicino alla sorgente luminosa. Gli autori hanno inoltre verificato che software comuni di mappatura e localizzazione potessero elaborare con successo il dataset, confermando che timestamp, calibrazioni e formati sono sufficientemente robusti per la ricerca robotica reale. 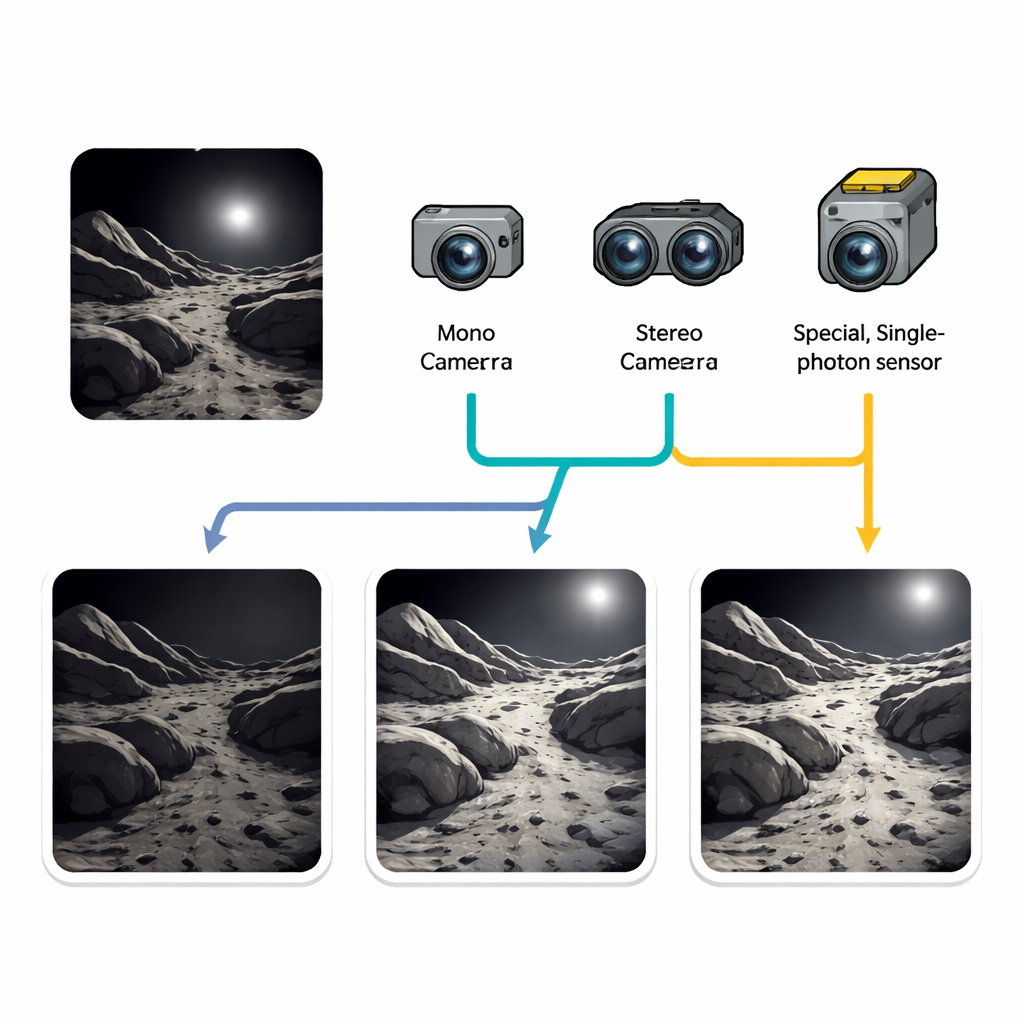
Limiti, avvertenze e perché questo è importante
Anche se LunaLab non può riprodurre perfettamente i piccolissimi granelli di polvere e i sottili effetti di diffusione della luce del vero suolo lunare, e un involontario bagliore infrarosso proveniente dal sistema di motion‑capture è filtrato in alcune delle scene più scure, gli autori sostengono che SPICE‑HL3 rappresenti comunque un ambiente ottico impegnativo in condizioni di “worst‑case” per la visione dei rover. Per ingegneri e scienziati che preparano missioni ai poli lunari — o che progettano robot per qualunque ambiente scarsamente illuminato e ad alto contrasto — il dataset offre un raro benchmark pubblicamente disponibile. Rende possibile confrontare in modo equo nuove tecnologie di fotocamere come i sensori SPAD con i sistemi tradizionali, migliorare algoritmi di navigazione e mappatura e, in ultima analisi, contribuire a garantire che i futuri rover possano continuare a muoversi in sicurezza attraverso le ombre mutevoli della Luna anziché rimanere bloccati nel buio.
Citazione: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
Parole chiave: robotica lunare, navigazione planetaria, imaging a singolo fotone, dataset per visione robotica, illuminazione estrema