Clear Sky Science · it
Un sensore di imaging 4D coerente su larga scala
Vedere il mondo in quattro dimensioni
Auto a guida autonoma, droni per le consegne e visori per la realtà aumentata si affidano tutti a macchine che devono comprendere in tempo reale il mondo 3D che le circonda. Oggi questo tipo di visione è spesso ingombrante, costoso o energivoro. Questo articolo descrive un importante passo verso una “fotocamera 4D” — un sensore delle dimensioni di un chip che non solo mappa la forma di una scena in 3D ma misura anche come gli oggetti si muovono, portando potenzialmente la visione machine compatta su tutto, dai robot agli smartphone.
Dalle foto piatte alle mappe vive
Le fotocamere convenzionali catturano l’intensità della luce su una superficie piatta, producendo splendide immagini 2D ma senza informazioni dirette sulla distanza. Per contro, i sistemi LiDAR (light detection and ranging) inviano impulsi laser e misurano il tempo di ritorno, costruendo una mappa 3D dell’ambiente. Gli approcci esistenti possono vedere a lunga distanza e con grande dettaglio, ma tendono a richiedere parti in movimento, ottiche grandi o molta energia per punto misurato. Ciò rende difficile realizzare qualcosa di piccolo, economico e robusto come la fotocamera di uno smartphone ma capace di scandire strade, siti industriali o stanze affollate con elevata precisione.
Un chip che misura distanza e movimento
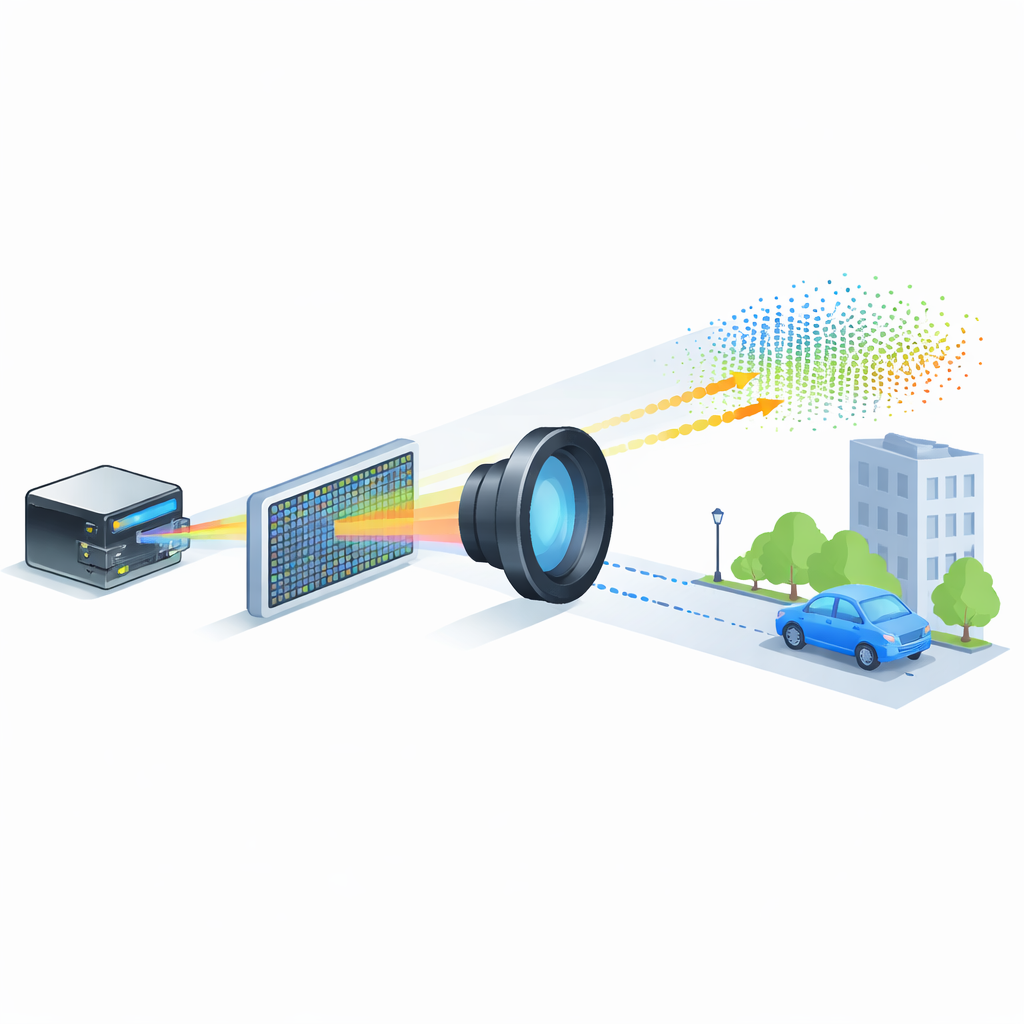
I ricercatori presentano una nuova tipologia di matrice di piano focale LiDAR — essenzialmente la versione LiDAR del sensore d’immagine presente in una fotocamera digitale. Il loro dispositivo contiene 352 per 176 pixel, per un totale di oltre 60.000 siti di rilevamento, tutti costruiti su un singolo chip di fotonica su silicio insieme all’elettronica di controllo. Invece di usare brevi impulsi laser, il sistema si basa sulla luce a onda continua a frequenza modulata (FMCW), in cui il colore del laser viene variato in modo controllato in un “chirp”. Quando la luce rimbalza sugli oggetti e torna al chip, viene combinata coerentemente con un fascio di riferimento. Piccole differenze di frequenza rivelano sia quanto è distante ogni punto sia quanto velocemente si sta muovendo verso o lontano dal sensore, aggiungendo la velocità come quarta dimensione misurata.
Come funziona la griglia di luce in miniatura
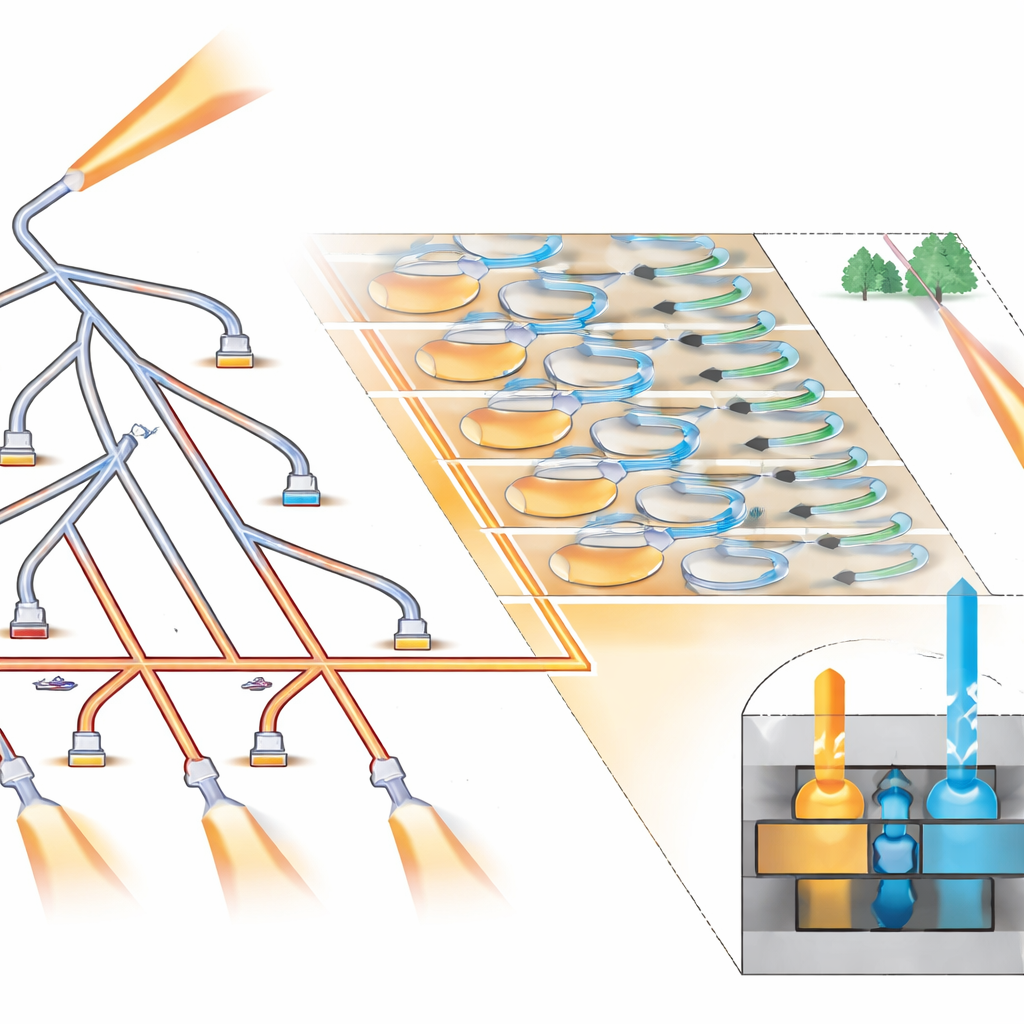
Per coprire molti pixel senza sprecare energia, il chip instrada la luce chirpata attraverso un albero di miniature interruttori ottici, guidandola sequenzialmente a gruppi di otto pixel vicini. All’interno di ogni gruppo, la luce viene divisa in modo uniforme in modo che tutti e otto operino contemporaneamente come trasmettitori e ricevitori. Ogni pixel usa una coppia di accoppiatori a reticolo per inviare e raccogliere la luce, oltre a una coppia di fotodiodi bilanciati e un amplificatore on-pixel per estrarre il segnale di battimento che codifica distanza e velocità. Microlenti appositamente progettate depositate direttamente sul chip aiutano a convogliare più luce in ingresso e in uscita, migliorando l’efficienza. Poiché la stessa apertura invia e riceve la luce (design “monostatico”), il sistema evita accoppiamenti indesiderati tra i pixel e necessita di un solo obiettivo esterno, proprio come una fotocamera tradizionale.
Mettere alla prova la fotocamera 4D
Utilizzando lenti per l’infrarosso a onde corte disponibili in commercio, il team ha costruito un modulo simile a una fotocamera attorno al chip e ha acquisito dettagliate nuvole di punti 3D di scene interne ed esterne. Con una sola lente, il sensore ha raggiunto un campo visivo di circa 33 per 19 gradi e una risoluzione angolare fino a 0,06 gradi — sufficiente a distinguere mobili in un ufficio e dettagli architettonici su edifici a decine di metri di distanza. Il sistema ha misurato oggetti da 4 a 65 metri usando solo decine di nanojoule di energia ottica per punto e una potenza media sul target di circa 178 microwatt per pixel, rimanendo entro rigorosi limiti di sicurezza per gli occhi. Ha anche tracciato il movimento: in un esperimento ha misurato la variazione della velocità radiale di un disco rotante con precisione millimetro al secondo.
Prestazioni, limiti e sviluppo futuro
Misure accurate mostrano che le prestazioni del sensore sono vicine ai limiti fisici fondamentali imposti dalla natura quantistica della luce, ma non ancora pienamente raggiunti. Oggi il limite principale è il rumore elettronico degli amplificatori in ogni pixel, che riduce leggermente il rapporto segnale-rumore rispetto a un rivelatore ideale limitato unicamente dai fotoni. Gli autori delineano semplici accorgimenti di progettazione — principalmente aumentare il livello di luce di riferimento interno e affinare il layout ottico, potenzialmente usando blend silicio–nitruro di silicio — che potrebbero portare il sistema in un regime veramente limitato dal rumore di shot e aumentare la portata utilizzabile oltre i 200 metri. Spostare alcuni interruttori on-chip fuori dalla matrice di pixel eliminerebbe anche piccoli spazi nella copertura a lungo raggio, producendo nuvole di punti più pulite.
Verso una visione 4D di tutti i giorni
Questo lavoro dimostra un sensore di imaging 4D compatto e completamente integrato che eguaglia i conteggi di pixel e le portate richieste da molte applicazioni reali, mantenendo sotto controllo potenza e dimensioni. Riunendo emettitori di luce, ricevitori, controllo del fascio ed elettronica di controllo su un singolo chip di silicio, il dispositivo svolge un ruolo simile per il rilevamento 3D e del movimento a quello che il sensore CMOS ha avuto per la fotografia digitale. Con ulteriori perfezionamenti, sensori del genere potrebbero diventare abbastanza economici e robusti da essere integrati in auto, robot, telefoni e visori, fornendo alle macchine una comprensione precisa e in tempo reale del mondo 3D e di come cambia di momento in momento.
Citazione: Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature 651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
Parole chiave: LiDAR, imaging 4D, fotonica su silicio, sistemi autonomi, rilevamento della profondità