Clear Sky Science · it
Fabbricazione in situ scalabile di pelle elettronica multimodale per robotica intelligente e sistemi interattivi
Dare ai robot e ai giocattoli il senso del tatto
Immaginate un robot che possa raccogliere delicatamente una fetta di pane tostato caldo senza schiacciarla o scottare la mano, o un giocattolo che risponda in modo diverso quando lo abbracci, pieghi un orecchio o lo riscaldi con il palmo. Questa ricerca descrive un nuovo tipo di “pelle elettronica” che avvicina queste idee alla realtà fornendo alle macchine un senso del tatto e dell’ambiente circostante più ricco e simile a quello umano.
Perché le macchine hanno bisogno di un tatto migliore
I robot e i dispositivi di oggi sono ancora impacciati nella gestione del mondo reale. Molti percepiscono solo una singola grandezza, come la pressione, e spesso si affidano a componenti ingombranti assemblati a mano, difficili da scalare. La pelle umana, invece, integra continuamente molti segnali contemporaneamente: tocco lieve, pressione forte, allungamento, calore e persino la sensazione di quanto un oggetto sia vicino prima del contatto. Gli autori di questo studio si sono posti l’obiettivo di costruire una versione elettronica della pelle in grado di catturare diverse di queste sensazioni simultaneamente, pur rimanendo sottile, flessibile e facilmente personalizzabile per compiti differenti.
Costruire un senso del tatto sottile e flessibile
Il team ha creato una “e-skin” a profilo ridotto usando un processo senza camera bianca che può essere scalato e rapidamente adattato. Al suo interno c’è un circuito flessibile in rame inciso con laser ultravioletto, che funziona come il cablaggio di una scheda ma può piegarsi e avvolgersi attorno a superfici curve. Sopra e sotto questo circuito è stata aggiunta una sottile layer di silicone morbido pieno di piccole porosità d’aria, simile a una spugna. Le superfici esterne sono rivestite con una pellicola sottile di nanotubi di carbonio, che forma un guscio conduttivo che protegge il dispositivo dai disturbi elettrici e funge da riferimento comune per la misura. Questa stratificazione permette a ciascun pad sensoriale di comportarsi come un piccolo condensatore la cui capacità varia quando il materiale viene premuto, piegato, riscaldato o avvicinato a un oggetto. Piccoli chip aggiuntivi montati sullo stesso circuito flessibile misurano temperatura e distanza senza contatto, così l’intero foglio imita non solo i recettori di pressione e di deformazione della pelle, ma anche la percezione del calore e una sorta di visione prossimale. 
Come i sensori percepiscono pressione e movimento
Le parti dedicate a pressione e flessione della e-skin sono progettate per reagire in modo sensibile a piccoli cambiamenti pur mantenendo robustezza. Quando qualcosa preme, i pori nello strato morbido si comprimono, avvicinando gli strati metallici interni e sostituendo l’aria con più silicone. Entrambi gli effetti aumentano il segnale elettrico, soprattutto a basse pressioni dove il materiale è più facilmente comprimibile. I test hanno mostrato che la e-skin è in grado di rilevare tocchi molto delicati, fino a poche decine di pascal, con risposta rapida e poca deriva anche dopo diecimila cicli di pressione e rilascio. Quando il foglio si piega, si avvolge attorno al cablaggio interno, riducendo nuovamente la distanza tra gli strati su un lato e incrementando il segnale. La risposta cresce in modo più marcato ad angoli di piega maggiori, coerente con il fatto che le pieghe nel mondo reale tendono a localizzarsi piuttosto che distribuirsi uniformemente. Nel complesso, il progetto bilancia morbidezza, stabilità e sensibilità senza le strutture stratificate complesse usate in molti dispositivi precedenti. 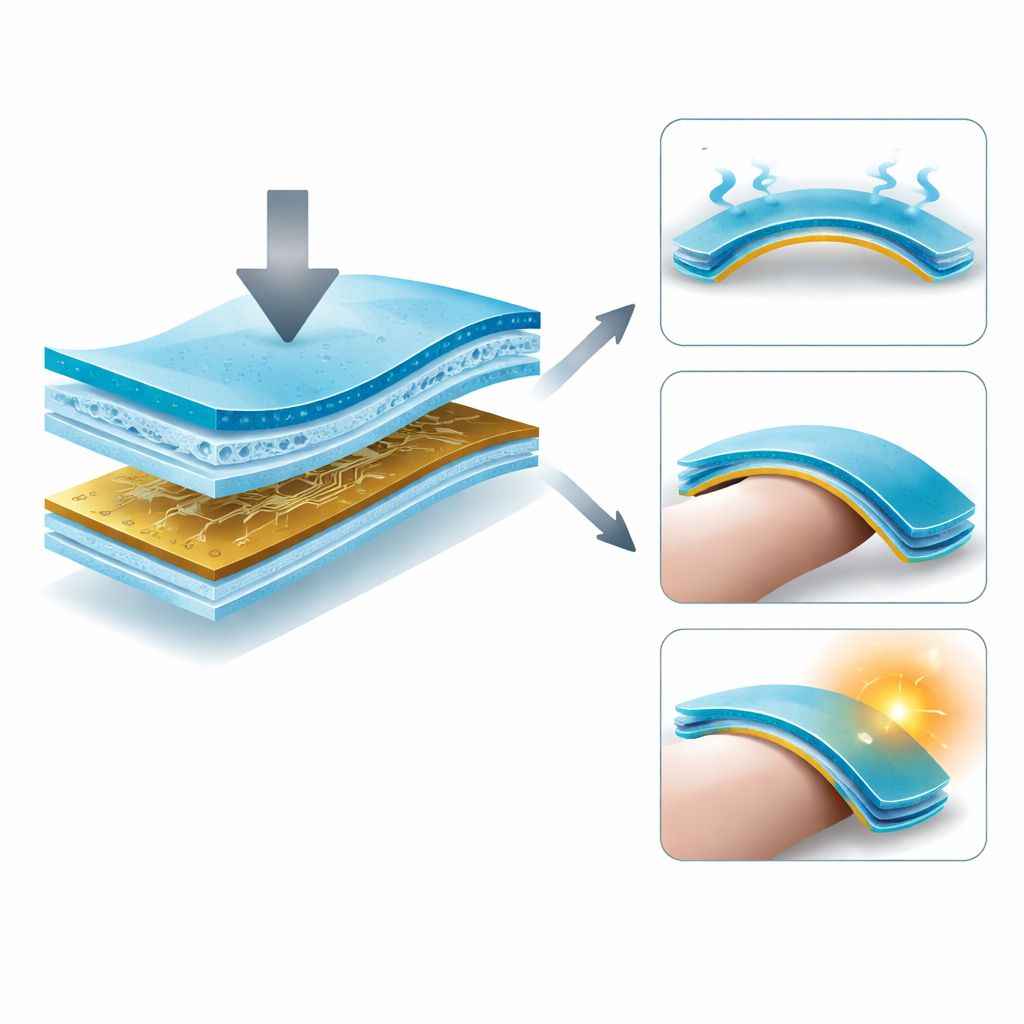
Dai robot da cucina ai compagni giocosi
Per dimostrare le capacità della e-skin, i ricercatori l’hanno avvolta attorno a una pinza robotica e hanno assegnato al robot un compito di tipo culinario. Mentre la pinza si avvicina a una fetta di pane caldo, un piccolo modulo di sensore di profondità incorporato nella pelle mappa prima quanto è distante l’oggetto, aiutando il robot a posizionare le dita prima del contatto. Una volta a contatto, i sensori di pressione e flessione guidano la forza di presa, evitando scivolamenti o di schiacciare il pane. Un sensore di temperatura sullo stesso foglio verifica quando il pane si è raffreddato abbastanza da poterlo passare in sicurezza a una persona. In un altro esempio, il team ha costruito un giocattolo morbido a forma di elefante coperto di e-skin. Premendo il petto cambia il ritmo di un motore a vibrazione nascosto per simulare un battito cardiaco, piegare un orecchio attiva suoni e il calore della mano può illuminare le guance del giocattolo, trasformando il contatto tattile in un’interazione giocosa ed emotiva.
Osservare i pattern di pressione su una superficie
Oltre ai singoli punti, lo stesso metodo di fabbricazione può creare grandi matrici sensibili alla pressione che rilevano dove e con quale intensità una superficie viene toccata. Il team ha dimostrato una griglia 8 per 15 che funziona come una telecamera della pressione: man mano che dita, pesi o forme timbrate premono, il sistema ricostruisce il pattern di forza e identifica persino contorni come lettere. Questa capacità di catturare mappe di pressione e centri di massa potrebbe aiutare i robot a bilanciare carichi, riconoscere oggetti o fungere da piattaforme di pesatura intelligenti e superfici interattive. Poiché il processo sottostante è veloce e modulare, i progettisti possono regolare dimensione, spaziatura e morbidezza dei pixel sensoriali per usi diversi, dall’arredamento intelligente ai tappeti per il monitoraggio della postura.
Cosa significa per la tecnologia di tutti i giorni
Combinando più modalità di rilevamento — pressione, flessione, calore e prossimità — in un unico foglio sottile e facilmente personalizzabile, questo lavoro avvicina la pelle elettronica alle capacità sottili della pelle umana. Pur lasciando margine di miglioramento nelle prestazioni a pressioni molto elevate e nell’automazione di alcune fasi di assemblaggio, l’approccio dimostra già che un tatto ricco può essere aggiunto a robot, giocattoli e altri dispositivi senza hardware pesante assemblato a mano. In termini pratici, ciò potrebbe portare a robot domestici che maneggiano oggetti fragili in modo più sicuro, dispositivi medicali indossabili che monitorano il contatto corporeo con maggiore comfort e prodotti interattivi che rispondono al nostro tocco in modi molto più naturali.
Citazione: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Parole chiave: pelle elettronica, sensing tattile, sensori flessibili, pinza robotica, dispositivi interattivi