Clear Sky Science · it
Attuatore biomimetico realizzato da un nanocomposito polimerico ferroelettrico relaxor
Micro-robot che si muovono come insetti veri
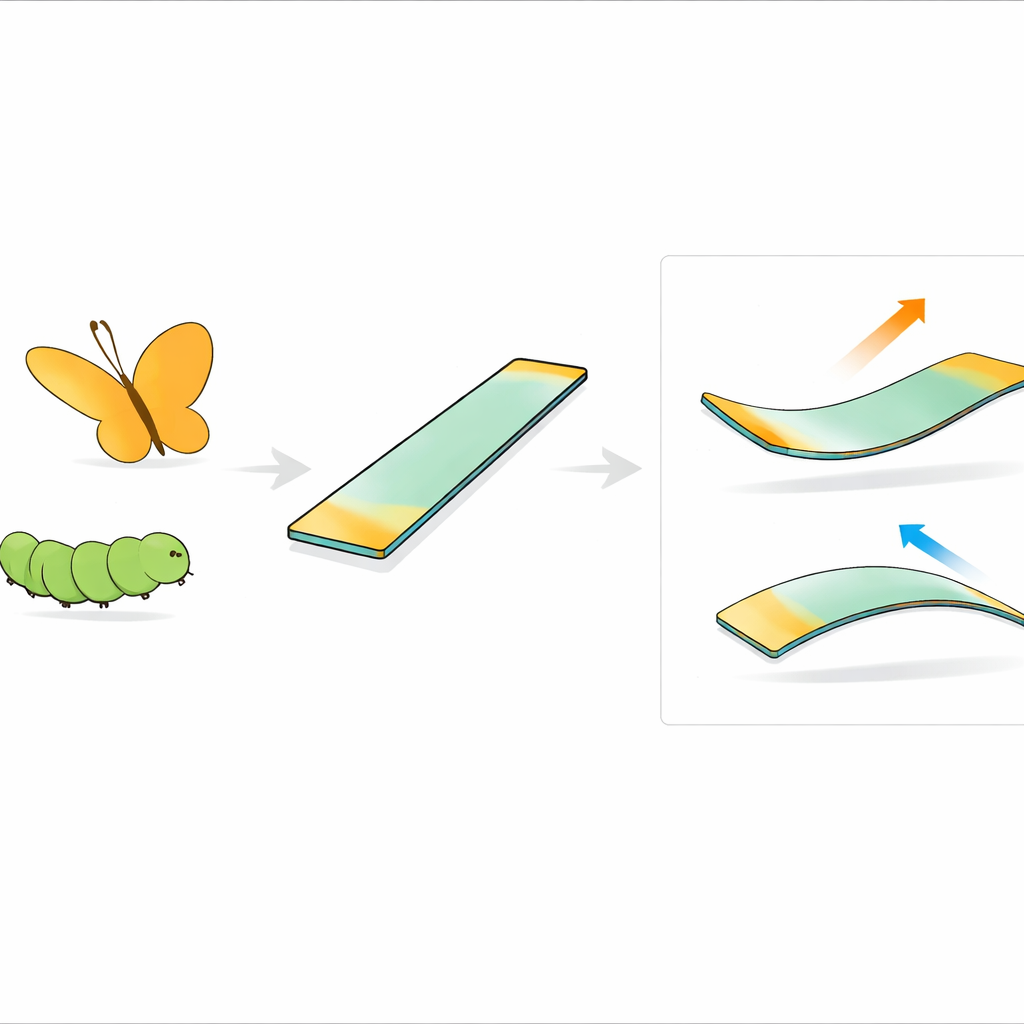
Immaginate un robot grande quanto un bruco che può strisciare su terreni accidentati, o un dispositivo simile a una farfalla che batte le ali e si solleva da terra—eppure è realizzato da un unico foglio di plastica spesso come carta e consuma meno energia di una lampada notturna a LED. Questo articolo descrive un nuovo tipo di materiale morbido che può comportarsi come un muscolo artificiale, rendendo questi robot su scala insetto più semplici, leggeri ed efficienti dal punto di vista energetico rispetto al passato.
Perché macchine piccole e morbide sono importanti
I robot in miniatura ispirati agli insetti potrebbero infiltrarsi in edifici crollati per cercare superstiti, insinuarsi in tubazioni per ispezionare infrastrutture o sorvegliare silenziosamente coltivazioni e foreste. Per operare in questi spazi angusti e imprevedibili devono essere minuscoli, flessibili e robusti, consumando pochissima energia. Molti progetti attuali si basano su assemblaggi complessi di ingranaggi, cerniere e materiali multipli, che aumentano il peso, dissipano energia e sono difficili da miniaturizzare ulteriormente. Gli autori sostengono che la soluzione ideale sia un singolo materiale in grado sia di generare il movimento sia di trasmetterlo direttamente, proprio come fa il muscolo negli animali.
Una plastica intelligente progettata dall’interno
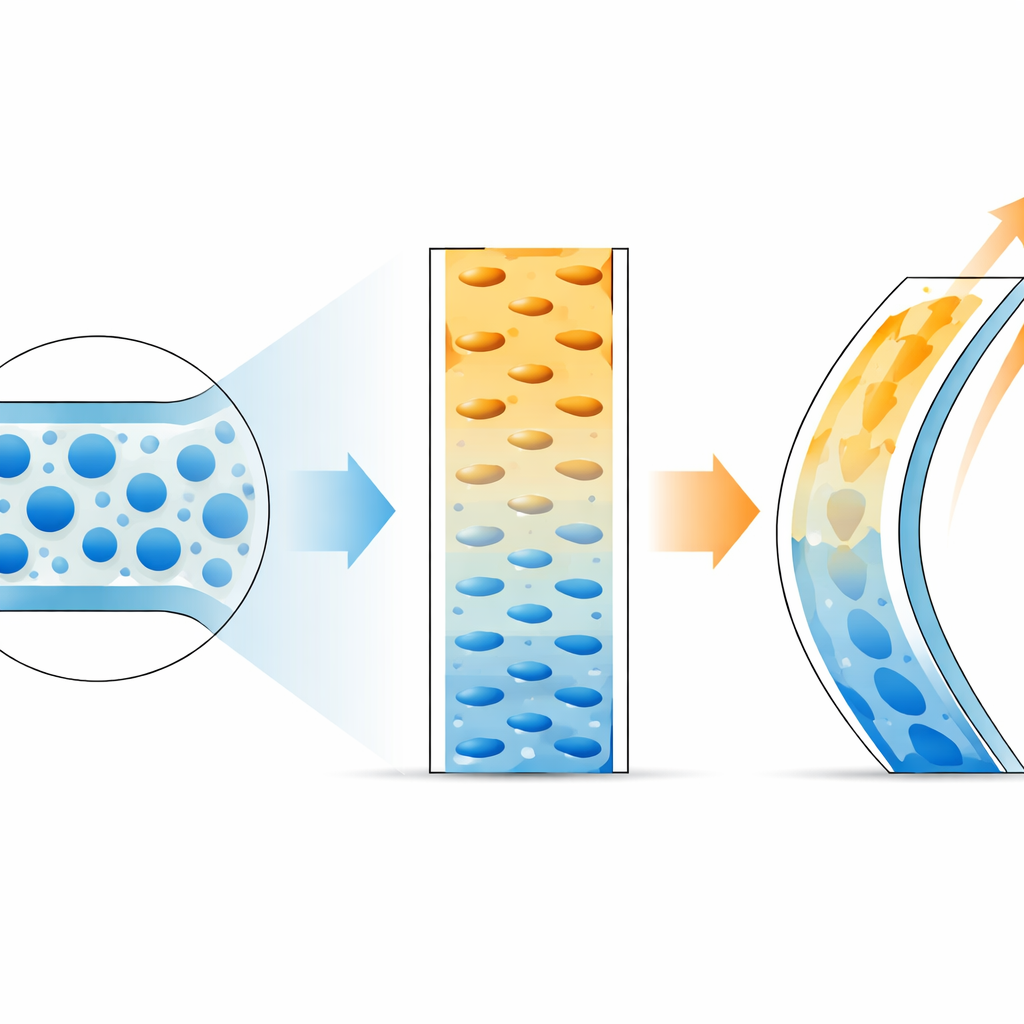
Al centro di questo lavoro c’è una sottile pellicola plastica basata su una nota famiglia di materiali chiamata PVDF, già apprezzata per la sua capacità di deformarsi quando è sottoposta a un campo elettrico. I ricercatori mescolano questa plastica con piccole “gocce polimeriche”, particelle nanometriche rivestite di gruppi chimici in grado di formare legami a idrogeno. Quando la miscela viene stesa in una pellicola e riscaldata delicatamente in modo controllato, il solvente evapora più rapidamente dalla parte superiore che da quella inferiore. Questa asciugatura disomogenea, insieme ai legami a idrogeno, favorisce l’allineamento delle catene polimeriche vicino alla superficie inferiore in una disposizione altamente ordinata e polare, mentre la parte superiore rimane meno ordinata. Il risultato è un gradiente interno incorporato attraverso lo spessore di un unico strato.
Dalla struttura nascosta al movimento potente
Questo sottile gradiente strutturale si traduce in un grande vantaggio meccanico. Quando si applica un campo elettrico attraverso la pellicola, la regione inferiore più ordinata e fortemente polare risponde più della parte superiore, così un lato del foglio si espande più dell’altro. Questo squilibrio fa piegare l’intera striscia, proprio come una classica lamina bimetallica in un termostato, ma qui avviene in una pellicola completamente organica e flessibile spessa solo decine di micrometri. Misurazioni accurate mostrano che la pellicola può variare la sua lunghezza fino a circa il 14 percento e immagazzinare densità di energia meccanica prossime a quelle degli attuatori ceramici rigidi—pur rimanendo morbida e leggera. Rispetto a una pellicola altrimenti identica priva delle gocce polimeriche o del processo di gradiente, il nuovo materiale produce diverse volte più deformazione e converte l’energia elettrica in movimento in modo molto più efficiente.
Costruire un bruco strisciante e una farfalla volante
Per dimostrare ciò che questo materiale può fare in pratica, il team taglia la pellicola in forme ispirate agli insetti e aggiunge semplici elettrodi a base di carbonio e sottili supporti in rame. Un design ricorda un piccolo bruco con una sezione centrale più ampia e estremità rastremate; quando si applica un campo elettrico alternato, la striscia si piega in un ritmo ondulatorio e striscia lungo una guida scanalata a velocità di diverse lunghezze del corpo al secondo, usando solo pochi milliwatt di potenza. Un secondo progetto imita una farfalla, con una regione centrale attiva e ali flessibili. Alimentate da segnali elettrici simili, le ali sbattono rapidamente e possono sollevare il dispositivo di alcuni millimetri da una piattaforma, portando carichi fino a venti volte il proprio peso—il tutto con una massa totale dell’attuatore di circa 50 milligrammi.
Cosa significa per i futuri micro-robot
Questo studio dimostra che, ingegnerizzando con cura come un materiale plastico è organizzato da un lato all’altro, è possibile creare un unico foglio ultra-sottile che si piega fortemente sotto un campo elettrico e può alimentare movimenti complessi e realistici. Sebbene i dispositivi attuali richiedano ancora tensioni relativamente elevate, il loro consumo di potenza estremamente basso e la costruzione piuma li rendono promettenti come elementi costitutivi per futuri robot delle dimensioni di insetti e dispositivi intelligenti. Con ulteriori perfezionamenti per ridurre la tensione operativa, pellicole simili potrebbero un giorno permettere flotte di minuscole macchine autonome che strisciano, sbattono le ali ed esplorano il mondo usando muscoli artificiali spessi quanto un capello.
Citazione: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
Parole chiave: robotica morbida, muscoli artificiali, attuatori polimerici, robot delle dimensioni di insetti, materiali elettroattivi