Clear Sky Science · it
Decodificare i movimenti dell’arto fantasma da registrazioni intraneurali
Nuovi modi di muoversi con una gamba mancante
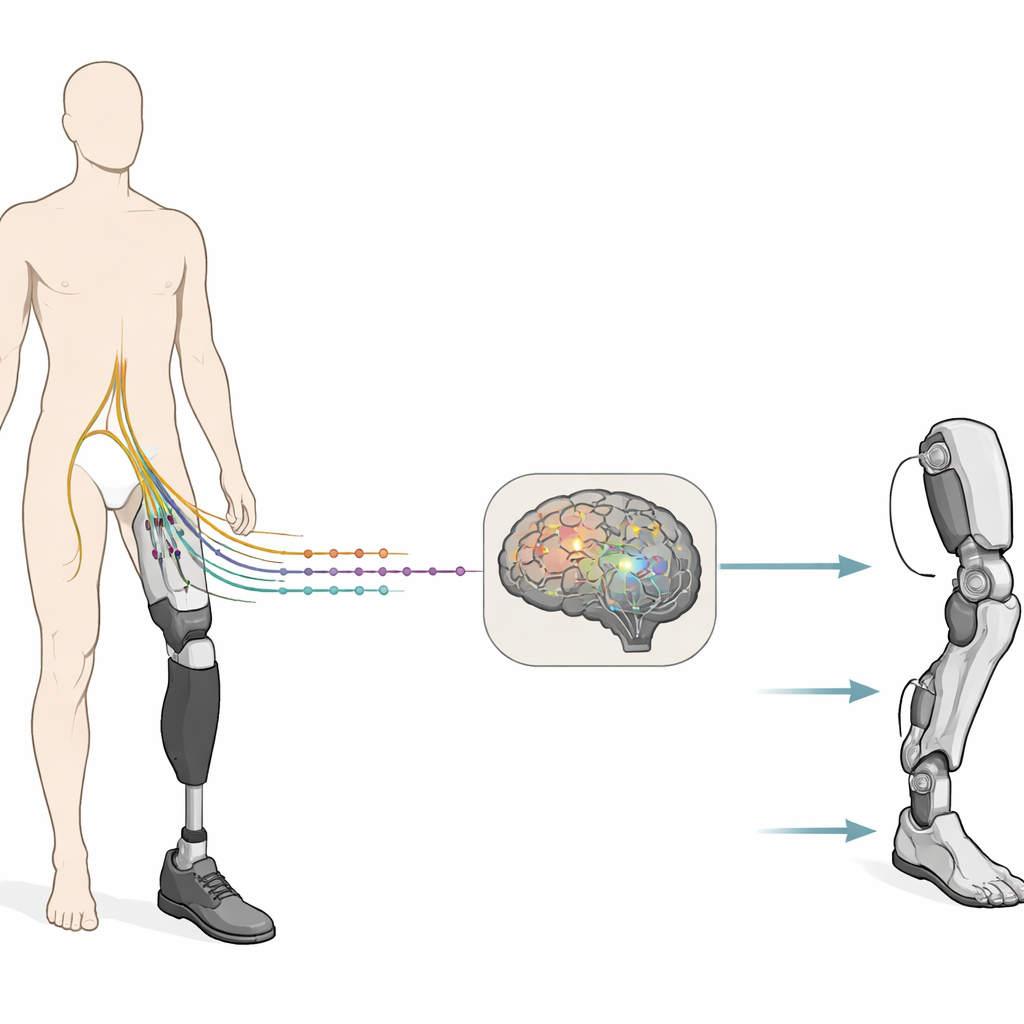
Per chi ha perso una gamba sopra il ginocchio, camminare con una protesi può somigliare più a guidare una macchina rigida che a muovere una parte del proprio corpo. Questo studio esplora una strada diversa: ascoltare direttamente i nervi residui della gamba quando gli amputati cercano di muovere la loro gamba “fantasma” e usare quei segnali per controllare una futura gamba bionica. Collegandosi agli stessi cablaggi che il cervello usava per muovere ginocchio, caviglia e dita, i ricercatori mostrano che un controllo naturale e intuitivo di un arto artificiale potrebbe essere a portata di mano.
Ascoltare i nervi all’interno della coscia
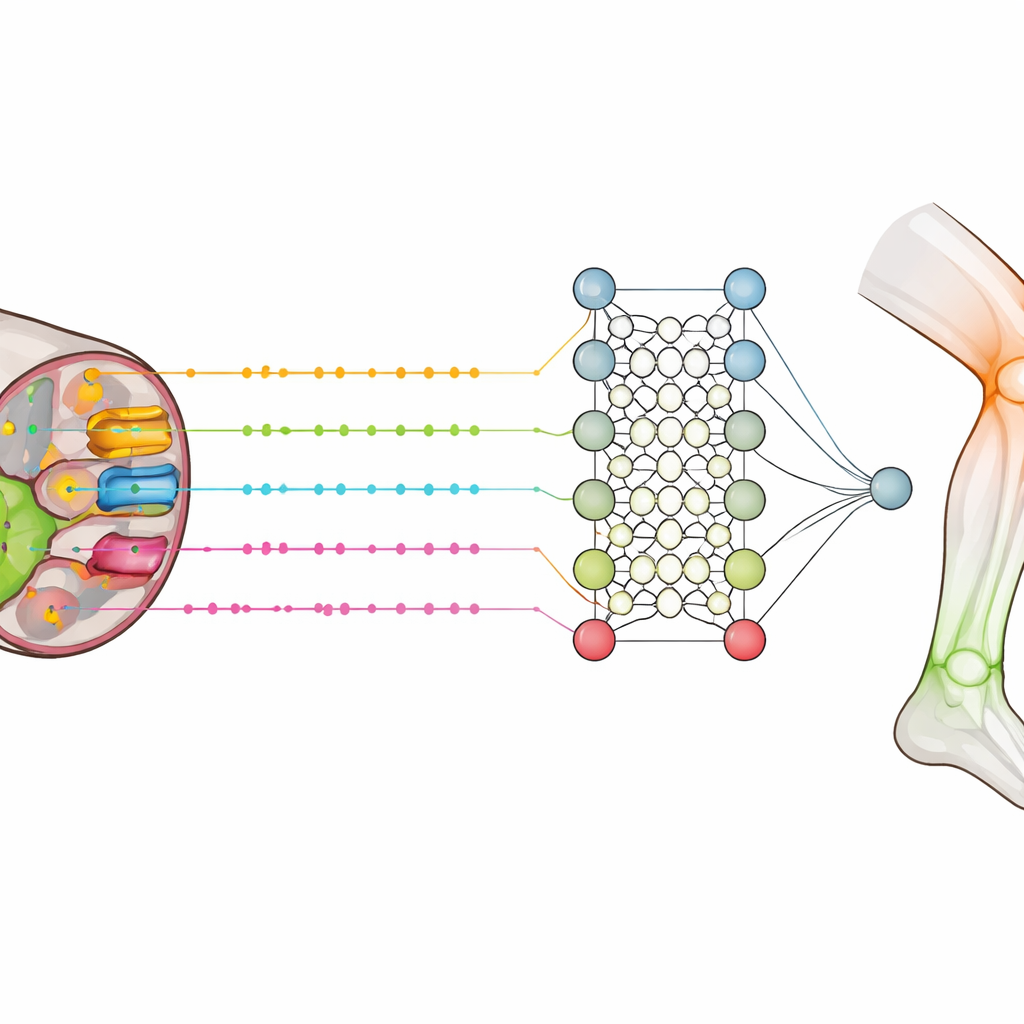
Il gruppo ha lavorato con due volontari che avevano perso una gamba sopra il ginocchio ma riuscivano ancora a percepire vividamente e a “muovere” la loro estremità fantasma. I chirurghi hanno impiantato quattro sottilissime strisce di elettrodi all’interno di un ramo del nervo sciatico nella parte posteriore della coscia. Ogni striscia ospitava più piccoli siti di registrazione, per un totale di 56 canali. Quando i partecipanti, seduti, venivano istruiti a flettere o estendere il ginocchio, la caviglia o le dita del piede fantasma, gli elettrodi captavano raffiche di attività elettrica dalle fibre nervose che un tempo controllavano muscoli ora scomparsi dopo l’amputazione.
I movimenti fantasma lasciano tracce elettriche reali
Anche se la parte inferiore della gamba era assente, i tentativi di muoverla producevano segnali chiari e strutturati nel nervo. La maggior parte dei siti di registrazione rispondeva ad almeno un tipo di movimento e molti distingueva tra flessione ed estensione. Alcuni elettrodi erano più sintonizzati sui movimenti del ginocchio, altri sulla caviglia o sulle dita, rispecchiando il modo in cui diversi gruppi muscolari sono cablati al nervo. L’intensità e il tempo dei pattern di scarica nervosa variavano da articolazione ad articolazione, suggerendo che la “mappa” originaria del controllo della gamba sopravvive nello sperone nervoso residuo. I ricercatori hanno anche riscontrato che questi pattern motori si allineavano bene con l’anatomia nota: i canali nervosi che si attivavano per un movimento tendevano a corrispondere ai muscoli che normalmente genererebbero quel movimento.
Insegnare un decodificatore ispirato al cervello
Acquisire l’attività nervosa è solo metà della storia; una futura protesi deve convertire rapidamente quei segnali complessi in comandi. Gli scienziati si sono rivolti a una rete neurale a spike, un tipo di rete artificiale che comunica usando brevi impulsi elettrici, proprio come fanno i neuroni reali. Hanno innanzitutto trasformato le registrazioni nervose grezze in treni densi di spike che enfatizzavano come la potenza del segnale cambiasse nel tempo. Questi treni di spike sono stati quindi alimentati in un decodificatore compatto che ha imparato a classificarli in “categorie” di movimento come la flessione della caviglia o l’estensione del ginocchio. Rispetto agli strumenti di machine learning standard, il decodificatore a spike è risultato sia più accurato sia più efficiente, riconoscendo in modo affidabile molteplici movimenti intenzionali a partire da brevi frammenti di attività nervosa.
Combinare segnali nervosi e muscolari
Poiché gli elettrodi si trovavano tra i muscoli della coscia, captavano anche piccoli segnali muscolari a frequenze più basse. Filtrando le registrazioni, il team è stato in grado di separare l’attività di tipo muscolare dagli spike nervosi più veloci. Quando hanno addestrato il decodificatore usando solo i segnali muscolari, le prestazioni sono migliorate rispetto all’uso dei soli dati nervosi ad alta frequenza. Il meglio di tutti, combinare entrambe le fonti — nervo e muscolo residuo — ha aumentato ulteriormente l’accuratezza, specialmente per i movimenti di ginocchio e caviglia. Questo suggerisce che una singola tecnologia impiantata potrebbe attingere sia al traffico nervoso sia all’attività muscolare residua per offrire un segnale di controllo più ricco e stabile per una gamba robotica.
Percepire il suolo mentre si muove la gamba
Gli stessi elettrodi intraneurali che ascoltavano i comandi di movimento potevano essere usati anche nella direzione opposta: inviare piccole scariche elettriche nel nervo per evocare sensazioni. In lavori precedenti con questi volontari, la stimolazione tramite questi impianti ha prodotto sensazioni tattili sulla pianta del piede e sulle dita. Nel presente studio, i ricercatori hanno mappato dove le registrazioni correlate al movimento e le sensazioni tattili si sovrapponevano. Hanno scoperto che le fibre nervose per il movimento e per la sensazione erano in gran parte separate a livello di coscia, il che potrebbe aiutare i progettisti ad assegnare alcuni contatti principalmente alla decodifica motoria e altri principalmente al feedback sensoriale, riducendo l’interferenza tra i due.
Cosa significa per le future gambe bioniche
Per un lettore non esperto, il messaggio fondamentale è che i “cavi” per muovere una gamba mancante sono ancora attivi e leggibili, anche anni dopo l’amputazione. Inserendo sottili elettrodi all’interno del nervo residuo e usando algoritmi ispirati al cervello per interpretare i segnali, è possibile capire, momento per momento, se un amputato sta tentando di piegare il ginocchio, puntare la caviglia o arricciare le dita di un arto fantasma. Abbinata alla stimolazione elettrica che ripristina la sensazione tattile del piede mancante, questa approccio potrebbe rendere le protesi che si muovono e si percepiscono molto più simili a un arto naturale. Sebbene il lavoro sia ancora in una fase iniziale di laboratorio ed è stato testato offline su sole due persone, pone basi importanti per protesi future che si connettono direttamente al sistema nervoso, offrendo un controllo più intuitivo, un miglior equilibrio e un senso di incorporazione più forte.
Citazione: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Parole chiave: arto fantasma, neuroprotesi, interfaccia nervosa periferica, reti neurali a spike, amputazione dell’arto inferiore