Clear Sky Science · it
Un occhio bionico composito sensore-visivo e olfattivo alla scala di un insetto
Occhi e nasi robotici in un unico piccolo dispositivo
Immaginate un insetto robot che non solo vede dove sta andando, ma “annusa” anche gas pericolosi nell’aria—tutto con un dispositivo non più grande dell’occhio di una vera mosca. Questo articolo descrive proprio una simile creazione: un occhio composito artificiale in miniatura che combina vista e olfatto in un singolo sensore ultraleggero. Ispirandosi alle mosche della frutta e ad altri insetti, i ricercatori mostrano come droni e piccoli robot futuri potrebbero navigare rapidamente e in sicurezza in ambienti ingombri e pericolosi consumando pochissima energia.

Ciò che la natura ha insegnato agli ingegneri
Insetti come le mosche della frutta si affidano a occhi compositi—cupole ricoperte di centinaia di piccole lenti—per rilevare il movimento su un ampio campo visivo, aiutandoli a schivare predatori e ostacoli. Allo stesso tempo, le loro antenne forniscono un acuto senso dell’olfatto, permettendo di individuare cibo, partner o minacce nell’aria. Questi due flussi di informazioni vengono integrati nel cervello dell’insetto per guidare decisioni rapide. Gli autori hanno cercato di ricreare questo doppio senso in hardware: un unico dispositivo alla scala di un insetto che imita l’occhio della mosca per la rilevazione del movimento a grande angolo e integra un “naso” chimico per leggere l’aria circostante, fondendo poi entrambi i segnali per comportamenti più intelligenti.
Costruire un piccolo occhio curvo che funziona davvero
Il team ha costruito un occhio artificiale cilindrico delle dimensioni di una testa di piccolo insetto, inserendo 1.027 piccole lenti in un quadrato di appena 1,5 millimetri di lato. Utilizzando una tecnica di stampa 3D ultra-precisa, hanno stampato direttamente una matrice di microlenti curva su uno strato flessibile di rivelatori di luce organici. Ogni lente si allinea con un singolo rivelatore, formando un “pixel” individuale che guarda nella propria direzione, molto simile a un ommatidio di insetto. Le lenti sono progettate con un angolo di accettazione ristretto in modo che la luce da una direzione non si disperda nei pixel adiacenti, imitando da vicino l’isolamento ottico naturale degli occhi compositi reali. Per far fronte a nebbia e umidità, i ricercatori hanno aggiunto strutture microscopiche simili a peli tra le lenti che aiutano a prevenire la condensazione di gocce sulla superficie, simili ai peli auto-pulenti attorno agli occhi di insetti reali.
Vedere il movimento e sentire l’aria in tempo reale
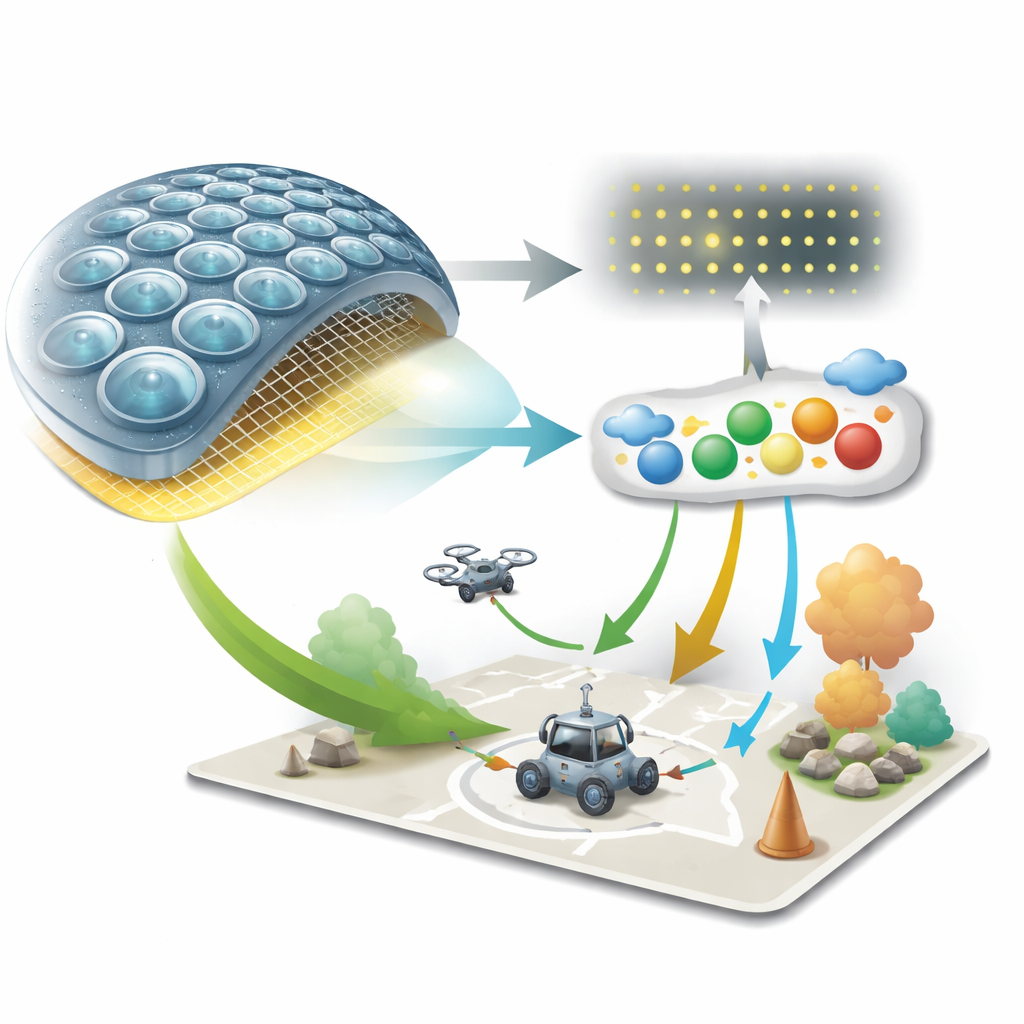
Sotto le lenti si trova uno strato fotosensibile appositamente progettato, composto da una miscela di semiconduttori organici e punti quantici di solfuro di piombo. Questa combinazione permette al dispositivo di rilevare luce dall’ultravioletto attraverso il visibile fino al vicino infrarosso rispondendo in circa un decimillesimo di secondo—abbastanza veloce per una frequenza di fusione delle immagini intorno a 1.000 fotogrammi al secondo. Piuttosto che formare immagini nitide e dettagliate, il dispositivo registra punti luminosi variabili sul suo ampio campo visivo, che un semplice modello matematico converte in informazioni su dove si trovano gli oggetti, quanto possono essere lontani e come si muovono. Parallelamente, una matrice colorimetrica stampata a getto d’inchiostro funge da naso artificiale: minuscoli punti contenenti complessi metallici e coloranti sensibili al pH cambiano colore quando esposti a gas pericolosi specifici. Un algoritmo di hashing leggero, ispirato alle mosche, converte questi cambiamenti cromatici nell’identità del gas e in una stima approssimativa della concentrazione, con circa il 93% di accuratezza su dieci vapori tossici comuni.
Dal banco di laboratorio a robot rotolanti e droni
Per dimostrare che questo “occhio-e-naso” alla scala di un insetto è utile anche fuori dal laboratorio, i ricercatori lo hanno montato su due piccole piattaforme senza pilota. Su un robot a ruote omnidirezionale, l’occhio curvo ha permesso al sistema di osservare un campo orizzontale di 180 gradi e rilevare il movimento abbastanza velocemente da schivare ostacoli in avvicinamento, anche in condizioni di nebbia. Regole semplici implementate in hardware—ancora una volta ispirate al comportamento di fuga degli insetti—hanno consentito al robot di indietreggiare di fronte a oggetti in avvicinamento o di sterzare intorno a essi mentre procedeva. Su un piccolo drone, lo stesso dispositivo ha tracciato la posizione di luci in movimento in tre dimensioni e, insieme al sensore di gas, ha guidato l’esplorazione autonoma attraverso un ambiente di prova contenente sorgenti luminose e pennacchi di sostanze chimiche pericolose. Informazioni visive e olfattive sono state combinate in modo che il drone potesse sia seguire obiettivi sia mappare gas pericolosi nello spazio.
Perché questo è importante per le macchine piccole del futuro
Questo lavoro dimostra che è possibile integrare sia la visione ad ampio angolo e ad alta velocità sia la rilevazione chimica in un sensore grande più o meno quanto l’occhio di un insetto reale. Il dispositivo sacrifica i dettagli fini dell’immagine a favore della sensibilità al movimento, della copertura spettrale ampia e dell’efficienza energetica—esattamente i compromessi che contano per piccoli droni e robot con risorse limitate di potenza e calcolo. Unendo “occhi” e “naso” in un unico sistema compatto e prendendo in prestito strategie di fusione dal cervello degli insetti, lo studio apre la strada a future sciami di macchine autonome piccole e a basso costo in grado di schivare ostacoli, riconoscere gas rischiosi ed esplorare ambienti complessi con l’agilità degli insetti volanti.
Citazione: Wang, J., Wei, S., Qin, N. et al. An insect-scale artificial visual-olfactory bionic compound eye. Nat Commun 17, 2259 (2026). https://doi.org/10.1038/s41467-026-68940-0
Parole chiave: occhio composito bionico, robotica bioispirata, sensori multimodali, micro sistemi visivi, rilevamento gas pericolosi