Clear Sky Science · it
Salti robotici potenziati da ipogravità indotta dalla spinta, per salti precisi, prevedibili e prolungati
Robot che saltano come se fossero sulla Luna
Immaginate un robot di soccorso che può scavalcare muri, saltare oltre ruscelli o attraversare una finestra in movimento senza sbagliare il punto d'atterraggio per più di un centimetro. Questo articolo descrive un nuovo tipo di macchina saltatrice che fa esattamente questo concedendosi per un breve istante una «bassa gravità», un po’ come sulla Luna o su Plutone, mantenendo al contempo salti precisi e prevedibili.
Perché i robot saltatori fanno fatica oggi
Animali come i grilli arborei o le rane sanno saltare lontano, atterrare su perni stretti e correggere la traiettoria in volo quando qualcosa cambia. La maggior parte dei robot non ci riesce. I robot saltatori tradizionali affrontano un compromesso: possono o saltare molto lontano usando molle o motori potenti, oppure atterrare in modo preciso e sicuro, ma difficilmente entrambe le cose. I progetti a «catapulta» caricati a molla immagazzinano molta energia ma richiedono tempi lunghi per ricaricarsi e sono difficili da controllare una volta in aria. Gambe mosse direttamente da motori sono più facili da controllare, ma mancano della potenza d’esplosione necessaria per salti molto alti. Aggiungere ali o rotori può prolungare il tempo di volo, ma spesso rende la traiettoria disordinata e imprevedibile, un problema se bisogna centrare un bersaglio piccolo o evitare ostacoli in movimento.
Simulare la bassa gravità con la spinta d’aria
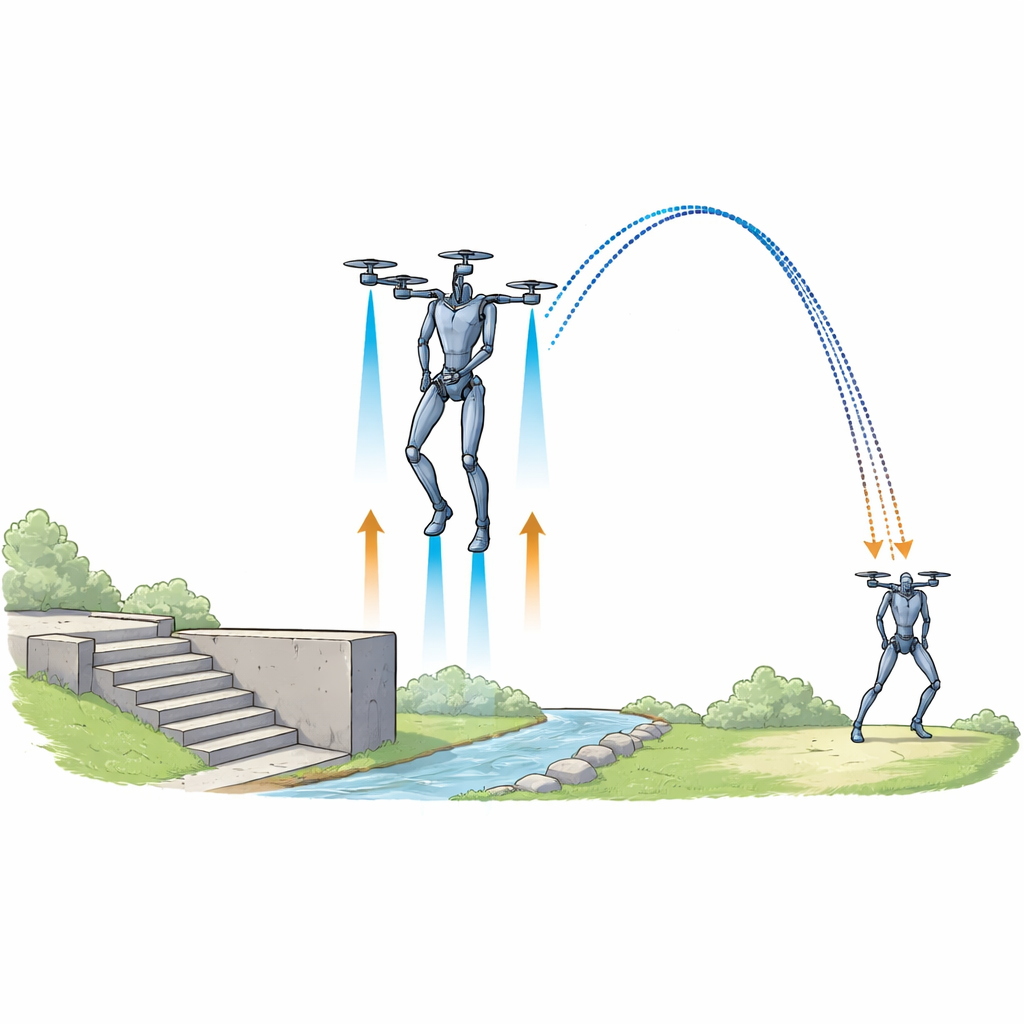
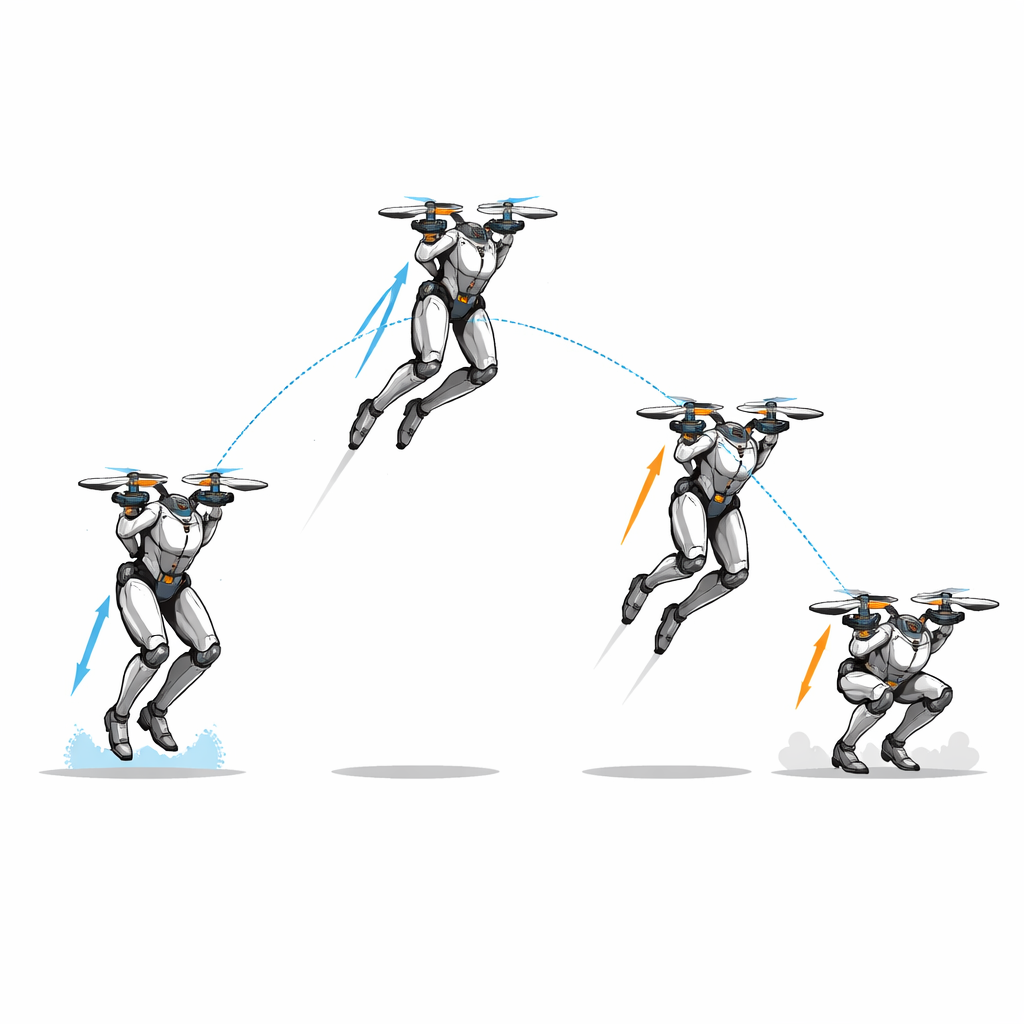
I ricercatori hanno costruito un robot bipede da 370 grammi chiamato GravOff che aggira questo compromesso creando il proprio ambiente a bassa gravità. Il robot ha un paio di lunghe gambe di aspetto insettoide mosse direttamente da motori, oltre a quattro piccoli eliche montate su un telaio largo. Durante un salto, le gambe forniscono una spinta rapida dal suolo per raggiungere una velocità di decollo elevata. Allo stesso tempo le eliche spingono verso l’alto quel tanto che basta per annullare parzialmente la gravità terrestre, una condizione che gli autori chiamano ipogravità indotta dalla spinta. Poiché la «gravità efficace» è minore, la stessa potenza delle gambe manda il robot lungo un arco molto più alto e più lungo—fino a 6,9 metri di altezza, circa 46 volte la sua altezza corporea—paragonabile ai migliori saltatori di record ma con velocità di decollo e atterraggio più dolci.
Disegnare e governare l’arco perfetto
Ciò che rende GravOff particolarmente insolito non è solo quanto lontano salta, ma quanto precisamente segue una traiettoria scelta. Il team tratta ogni salto come un arco con marca temporale, dove posizione e tempi sono vincolati insieme come punti su una parabola tracciata. Usando sensori e un algoritmo di controllo predittivo, il robot confronta il suo movimento reale in volo con questa curva di riferimento dozzine di volte al secondo e inclina leggermente i rotori per correggere la rotta. Crucialmente, le eliche possono ruotare indipendentemente dall’inclinazione del corpo del robot, così il robot può mirare la spinta senza dover inclinare tutto il telaio, mantenendo separate equilibrio e sterzata. Questo doppio controllo permette a GravOff di atterrare all’interno di un quadrato di soli 25 centimetri di lato con ripetibilità a livello di millimetri, anche quando l’angolo di decollo è sbagliato fino a 15 gradi o quando un ventilatore potente lo investe con raffiche d’aria di 3,5 metri al secondo durante il volo.
Atterraggi morbidi e stabili senza rimbalzo
I salti alti generalmente significano atterraggi duri, che possono danneggiare l’hardware o far rotolare un robot. GravOff affronta questo problema con due modalità di atterraggio. Per impatti particolarmente forti, un ammortizzatore morbido stampato in 3D in ogni gamba aiuta ad assorbire l’energia. Per atterraggi precisi su bersagli piccoli o in movimento, il robot ritrae attivamente le gambe e poi le riestende al momento giusto, estendendo il tempo di contatto con il suolo. Questo «smorzamento attivo» riduce le forze d’impatto di un fattore quattro rispetto all’atterraggio passivo e quasi annulla la quantità di moto in arrivo, così il robot si ferma al primo contatto invece di rimbalzare via.
Dai salti in laboratorio alle missioni sul campo
Oltre ai test controllati in ambiente interno, gli autori mostrano che GravOff può combinare salti con strisciamento e rotolamento per affrontare terreni reali. Può strisciare lentamente su erba, sabbia, ciottoli e pavimentazioni scanalate per mettersi in posizione di decollo sicura, quindi usare salti in ipogravità per superare ostacoli come scale a più gradini, un muro alto 2,35 metri o un corso d’acqua largo tre metri. La strategia del salto a bassa gravità si rivela anche molto più efficiente dal punto di vista energetico rispetto al puro volo per superare ostacoli di dimensioni medie: in alcuni test, i salti hanno impiegato meno di un decimo dell’energia totale richiesta per librarsi o volare oltre lo stesso ostacolo.
Cosa significa per i robot del futuro
In termini semplici, questo lavoro dimostra che i robot possono saltare più lontano, con maggiore accuratezza e in modo più sicuro fingendo che la gravità sia più debole e aggiustando la traiettoria di volo dopo il decollo. Il design di GravOff suggerisce esploratori futuri che potrebbero saltare attraverso macerie durante le operazioni di soccorso o attraversare scogliere e crateri su altri pianeti, prevedendo esattamente dove e quando atterreranno. Le stesse idee—compensare la gravità con la spinta e governare l’arco in volo—potrebbero essere aggiunte a molti altri robot saltatori, trasformando il salto in una modalità di spostamento affidabile e pianificabile anziché in un’ultima risorsa rischiosa.
Citazione: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Parole chiave: robot saltatori, ipogravità, vettorizzazione della spinta, locomozione a gambe, controllo della traiettoria