Clear Sky Science · it
Architettura a spiking ispirata alla biologia consente codifica tattile a basso consumo
Perché un tatto più intelligente conta per i robot
Le nostre punte delle dita ci permettono di percepire un granello di sabbia, un bicchiere che scivola o un tocco leggero in una frazione di secondo, consumando al contempo pochissima energia. Man mano che i robot escono dalle fabbriche e entrano nelle case, negli ospedali e in ambienti di lavoro affollati, avranno bisogno di un senso del tatto simile per interagire in modo sicuro con le persone e gli oggetti fragili. Questo studio introduce una nuova pelle artificiale e un sistema di elaborazione ispirato al cervello che permettono alle macchine di rilevare con grande precisione dove vengono toccate, mantenendo però un consumo energetico estremamente basso — un requisito chiave per i futuri robot mobili e collaborativi.
Una pelle flessibile che sente come la nostra
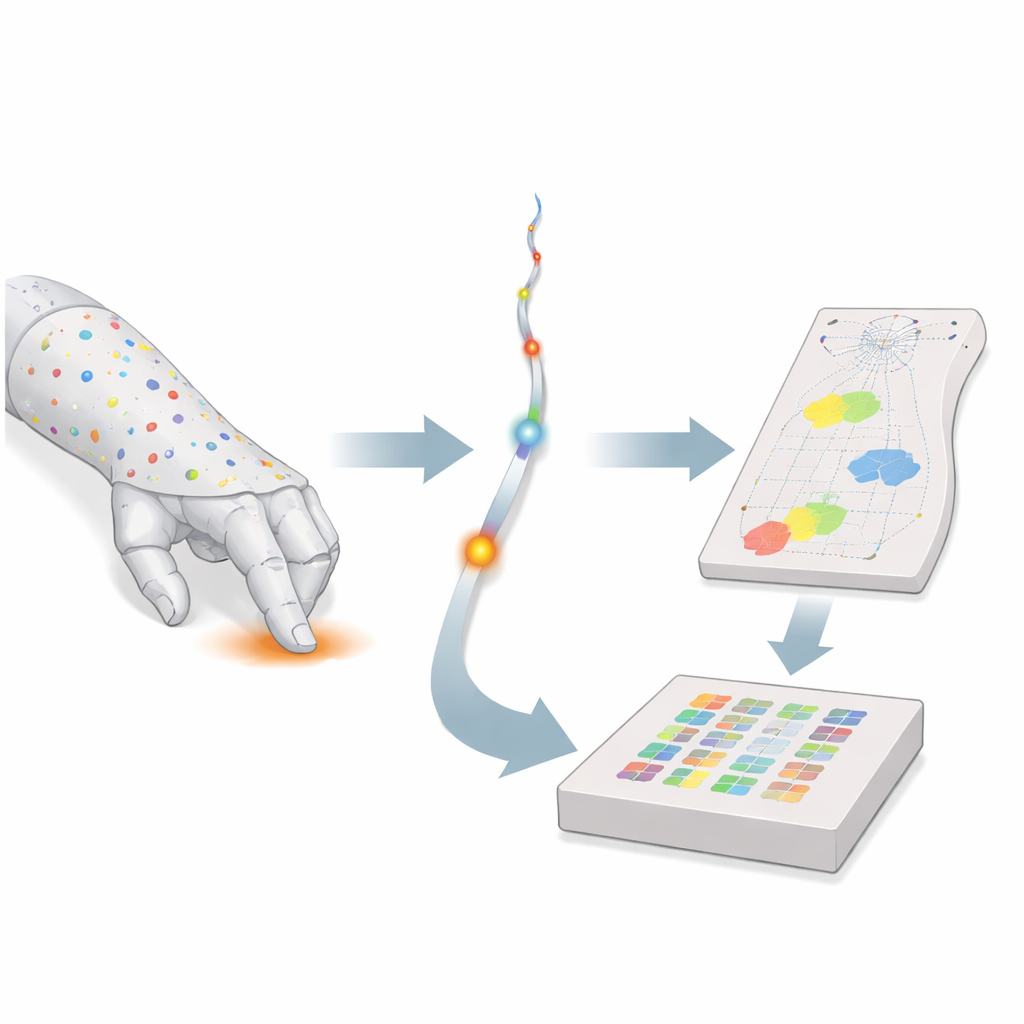
I ricercatori hanno costruito una "e-skin" morbida in silicone sagomata come un avambraccio umano e l’hanno dotata di 21 minuscoli sensori ottici distribuiti lungo una singola fibra sottilissima. Questi sensori, chiamati Fiber Bragg Gratings, rispondono all’allungamento e alla curvatura della pelle spostando la lunghezza d’onda della luce riflessa all’interno della fibra. Poiché la fibra serpeggia sotto la superficie, ogni sensore è sensibile non solo a un punto singolo ma a una piccola regione, proprio come i recettori tattili reali distribuiti nella nostra pelle. Alcuni di questi recettori artificiali reagiscono in modo molto localizzato alla pressione, mentre altri rispondono più ampiamente alle deformazioni, rispecchiando come le diverse terminazioni nervose nella pelle umana catturino sia i dettagli fini sia la forma complessiva.
Trasformare il tatto in impulsi elettrici
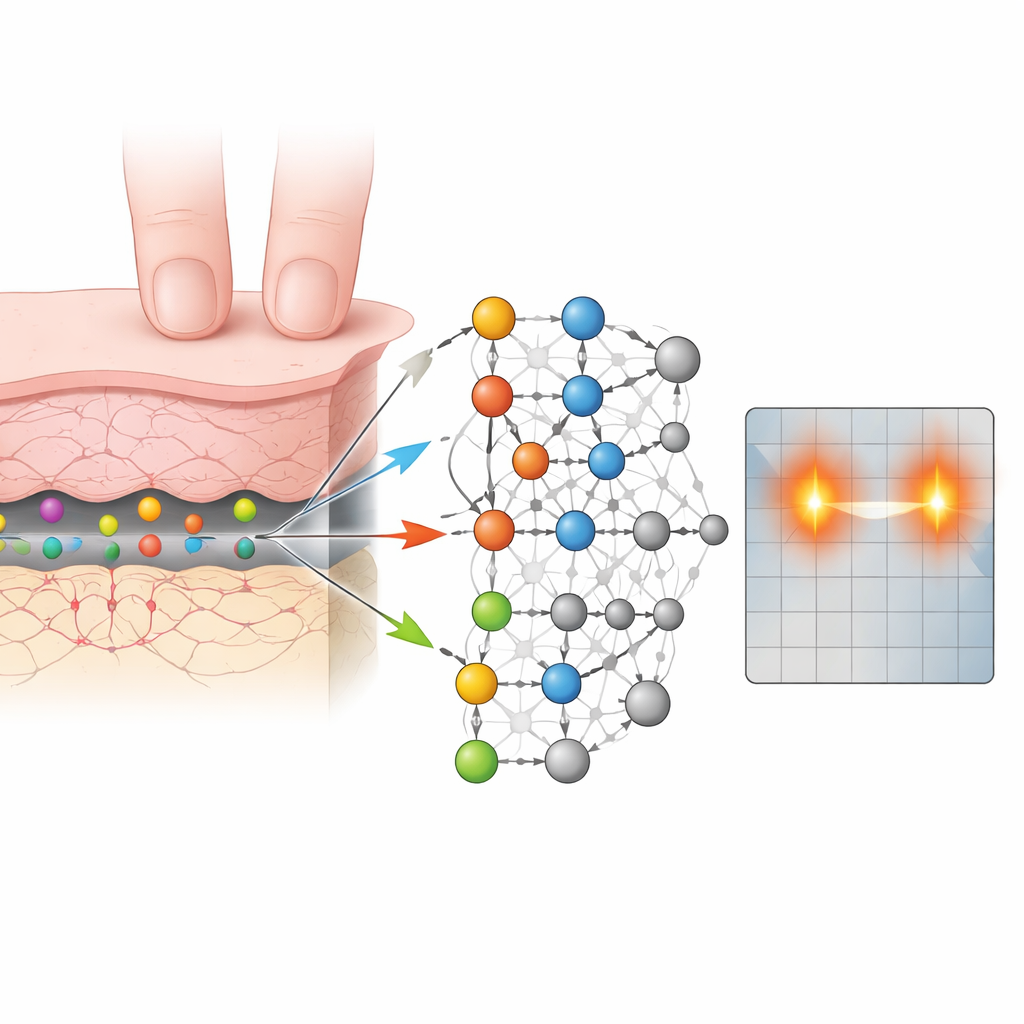
Per interpretare questo ricco flusso di dati, il team non si è affidato ai modelli convenzionali di deep learning che elaborano fotogrammi di numeri. Invece, ha imitato più da vicino la biologia utilizzando una rete neurale a spike, dove l’informazione viaggia come brevi impulsi elettrici, o "spike", simili ai potenziali d’azione. I segnali ottici dall’e-skin vengono convertiti in flussi di spike e inviati nella rete. Ogni neurone di output in questa rete rappresenta un punto specifico sulla pelle, formando una mappa interna bidimensionale della superficie. Quando qualcosa tocca l’e-skin, un gruppo di neuroni emette spike in uno schema che rivela il luogo del contatto, e il sistema calcola la posizione del tocco a partire dal centro di questa attività.
Tatto più nitido con meno risorse
Con questo design, il sistema localizza punti di tocco singoli sull’avambraccio artificiale con un errore tipico di circa tre millimetri, superando di circa un terzo una solida baseline di deep learning e ottenendo una risoluzione spaziale circa dieci volte migliore di quella attesa dalla semplice spaziatura dei sensori. Funziona anche quando vengono premuti più punti contemporaneamente, fino a quattro contatti simultanei, e quando le pressioni sono applicate manualmente con forza e direzione variabili. I ricercatori hanno esplorato diversi schemi di connessioni interne nella rete e hanno scoperto che una disposizione ispirata ai primi percorsi del tatto nel midollo spinale — dove cellule eccitatorie alimentano interneuroni inibitori che sopprimono gli output vicini — è cruciale per affinare i dettagli spaziali. Questa "inibizione laterale" aiuta a mantenere la rappresentazione nitida, prevenendo la sovrapposizione quando i contatti sono vicini.
Progettato per il basso consumo, non solo per la precisione
Un obiettivo centrale del lavoro è contenere il consumo energetico, un aspetto che diventa critico se l’intero corpo di un robot è ricoperto di sensori. Il team ha addestrato la rete sotto crescente pressione a emettere meno spike, imitando la necessità evolutiva di bilanciare prestazioni e costo metabolico. In condizioni non vincolate, un’architettura più flessibile e meno biologicamente realistica ha offerto prestazioni leggermente migliori. Ma una volta che l’attività di spike è stata ridotta a livelli energeticamente efficienti, la disposizione bioispirata ha effettivamente prevalso, offrendo maggiore accuratezza per lo stesso budget di attività. I ricercatori hanno quindi portato questa rete su un chip neuromorfico a segnali misti che implementa neuroni e sinapsi direttamente in elettronica analogica. Su questo hardware, il sistema tattile ha funzionato a potenze sub-milliwatt durante il contatto e a pochi microwatt a riposo, con una perdita minima di precisione.
Dagli avambracci di laboratorio ai corpi robotici del futuro
Complessivamente, questo lavoro dimostra che combinare con cura sensori morbidi e distribuiti con calcolo a spike di tipo cerebrale può offrire alle macchine un senso del tatto preciso e veloce senza un conto energetico pesante. Abbinando non solo le prestazioni ma anche i principi di connessione dei primi percorsi tattili nel sistema nervoso, il sistema suggerisce perché l’evoluzione possa aver favorito certi motivi circuitali: forniscono accuratezza sufficiente sotto vincoli energetici stringenti. Su scala più ampia, e-skin e processori neuromorfici simili potrebbero permettere a robot e dispositivi protesici di percepire il contatto su tutta la superficie, reagire rapidamente a urti imprevisti e interagire in modo più sicuro e naturale negli ambienti complessi e dinamici in cui vivono e lavorano gli esseri umani.
Citazione: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Parole chiave: pelle artificiale, sensibilità tattile, reti neurali a spike, hardware neuromorfico, sicurezza nella robotica