Clear Sky Science · it
Un robot parallelo‑zampa in scala insetto basato su un meccanismo origami con attuazione integrata nella struttura
Piccoli robot per spazi stretti
Immaginate un robot di soccorso abbastanza piccolo e leggero da infilarsi attraverso una crepa in un muro, strisciare lungo un tubo stretto o perfino attraversare a nuoto una pozzanghera. Questo articolo presenta una macchina di quel tipo: un robot delle dimensioni di un palmo, simile a un insetto, chiamato PLioBot, realizzato a partire da un unico foglio piegato, capace di muoversi molto rapidamente rispetto alle sue dimensioni e di affrontare molti tipi di terreni accidentati. I ricercatori mostrano come combinare piegature intelligenti con minuscoli motori vibranti possa trasformare materiali piani in esploratori agili per luoghi angusti e difficili da raggiungere.
Da un foglio piatto a un crawler a quattro zampe
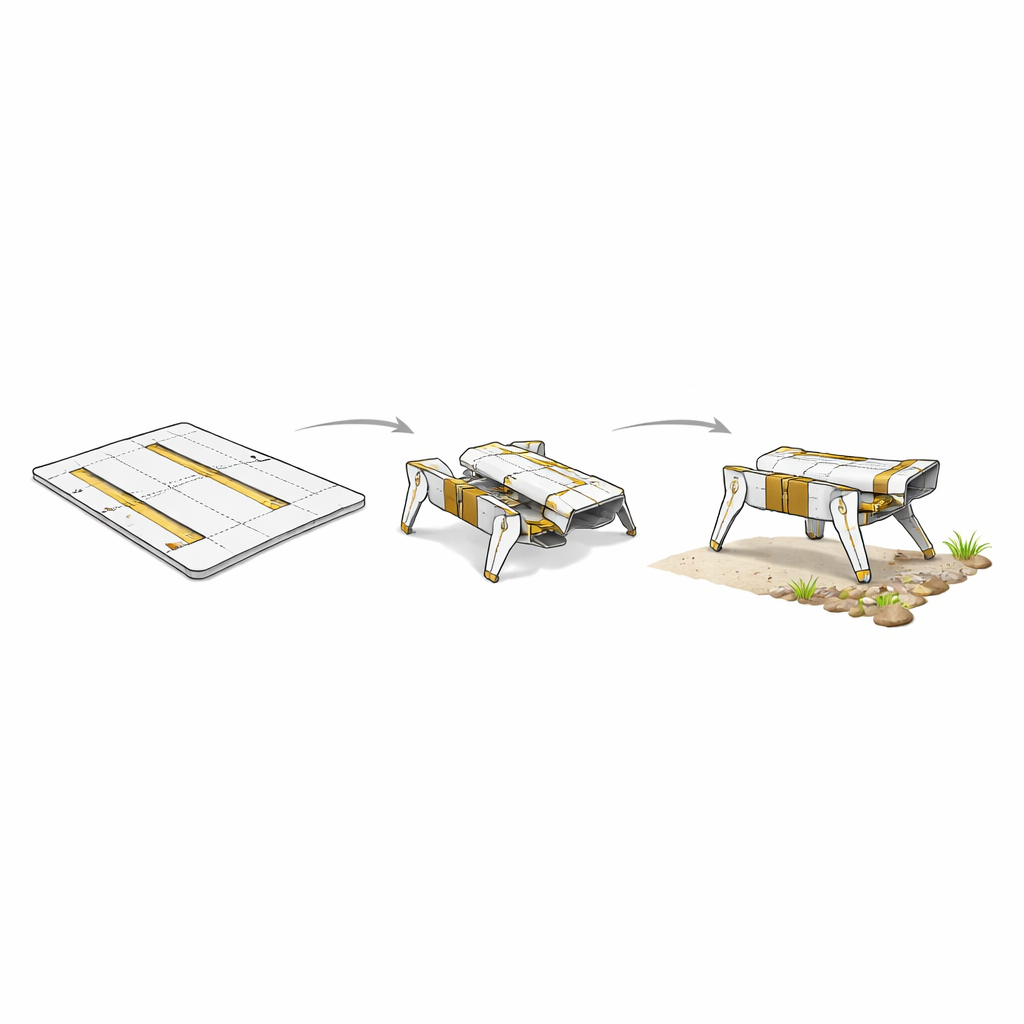
PLioBot nasce come uno schema piatto, molto simile a un giocattolo di carta da ritagliare e piegare. Al posto della carta, lo schema è un sandwich a cinque strati di fibra di vetro, fibra di carbonio, un film plastico flessibile e strisce di ceramica piezoelettrica che fungono da muscoli. Nelle regioni plastificate sono previste aree sottili posizionate con precisione che svolgono il ruolo di cerniere. Dopo il taglio laser, l’intera struttura viene piegata con una sequenza coreografata in modo che il corpo, le quattro gambe e tutti e otto gli attuatori emergano da un unico pezzo continuo. Niente viti, nessun motore separato e nessun allineamento manuale: la sola piegatura produce un robot completo lungo circa 2,5 centimetri e dal peso di appena 1,2 grammi.
Come le piccole zampe fanno grandi passi
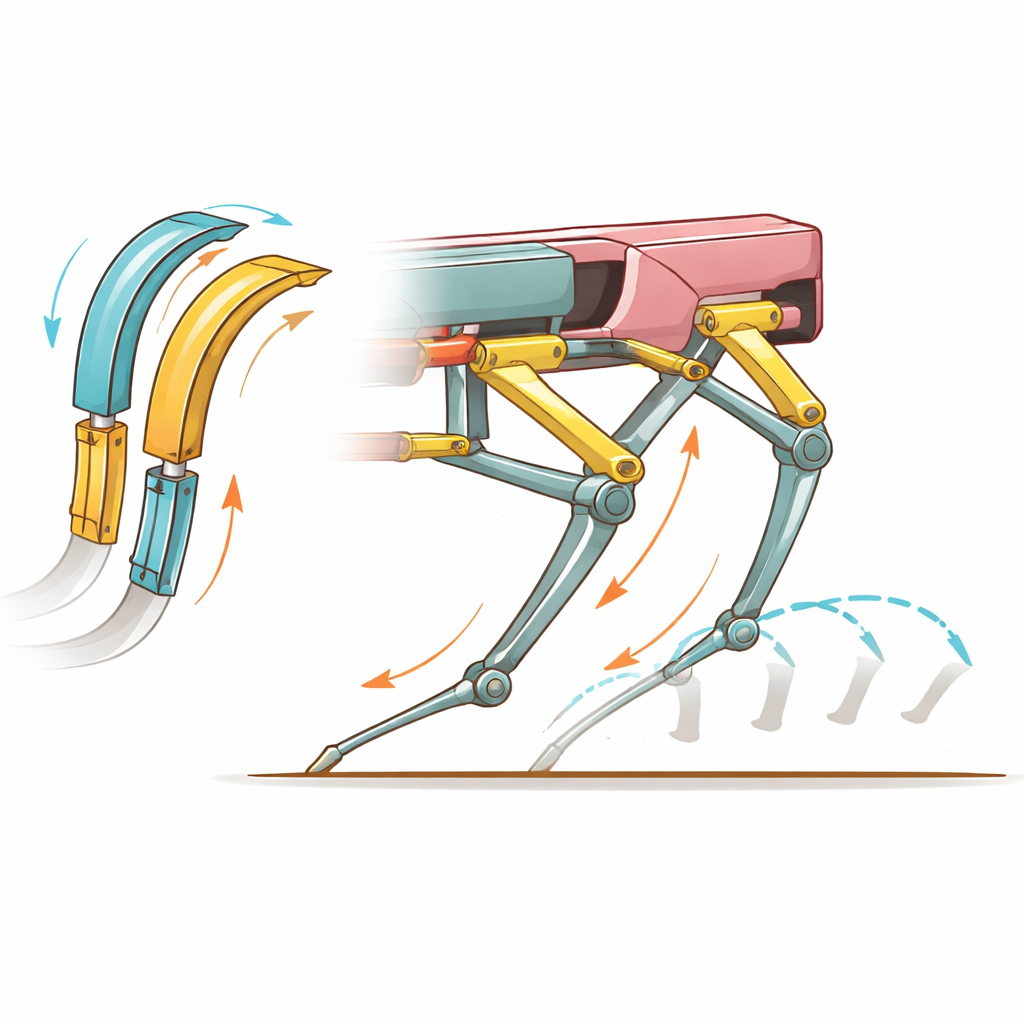
Il movimento del robot proviene dalle ceramiche piezoelettriche, materiali che si piegano leggermente quando viene applicata una tensione elettrica. Su ciascun lato di PLioBot sono montate coppie di attuatori a striscia “gemelli”. Quando tensioni alternate fanno oscillare queste strisce avanti e indietro, il loro movimento viene trasmesso attraverso una serie di biella‑cerniera che funzionano come un meccanismo parallelo in miniatura per le zampe. Dosando con cura i segnali, ogni zampa può muoversi su e giù oltre che avanti e indietro, tracciando con il piede un percorso ad anello. Coordinando tutte e quattro le zampe in un andamento simile al trotto, il robot può spingere efficacemente contro il suolo e lanciarsi in avanti. Con le impostazioni ottimali, PLioBot raggiunge i 44,6 centimetri al secondo — circa 18 lunghezze del corpo al secondo — risultando uno dei robot a zampe più veloci a questa scala.
Muscoli integrati, meno problemi di assemblaggio
La maggior parte dei robot in scala insetto vengono assemblati con cura da molte parti minuscole: motori o attuatori separati, telai e collegamenti che devono essere allineati manualmente. Questo aumenta i costi, limita la precisione e complica la produzione di massa. Gli autori affrontano il problema integrando completamente struttura e attuazione in un unico “meccanismo origami”. Utilizzano un processo di laminazione raffinato in cui tutti gli strati — pelli rigide in fibra di vetro, elettrodi in fibra di carbonio ortogonali, il film flessibile per le cerniere e le strisce ceramiche — vengono tagliati, impilati, allineati tramite fori di riferimento e pressati a caldo insieme prima del taglio finale del profilo con laser. Il risultato è un blank piatto robusto che contiene già lo scheletro, le articolazioni e i muscoli del robot nelle loro posizioni finali, pronto per essere piegato nella forma definitiva.
Camminare, arrampicarsi e nuotare su terreni reali
Per verificare l’utilità del progetto al di fuori del banco di prova, il team ha messo PLioBot alla prova su una varietà di ostacoli di uso quotidiano. Su vetro liscio rischia di scivolare, ma si muove comunque rapidamente; su spugna e acrilico guadagna aderenza a scapito di un po’ di velocità. Sale rampe fino a 12 gradi e può trasportare carichi superiori al proprio peso — fino a 1,7 grammi, con prestazioni particolarmente buone sotto circa 0,8 grammi. In tunnel stretti larghi solo 3 centimetri e alti meno di 3 centimetri, il robot trasporta un carico di 1,4 grammi mantenendo diverse lunghezze del corpo al secondo. Sostituendo i piedi con pad emisferici o con palette simili a pinne, PLioBot attraversa ghiaia e erba, supera sabbia mobile senza affondare, cammina sul fondo di un serbatoio e persino nuota sulla superficie dell’acqua usando solo le sue pinne per la spinta.
Cosa significa per i futuri piccoli esploratori
In termini semplici, questo lavoro dimostra che si può stampare e piegare un robot molto piccolo il cui corpo e i cui muscoli sono un unico pezzo, e che questo robot può muoversi velocemente e affrontare molte superfici reali e disordinate. PLioBot dipende ancora da fili di alimentazione esterni, quindi non è ancora completamente autonomo. Ma il design origami integrato e il metodo di fabbricazione indicano un futuro in cui grandi numeri di robot economici in scala insetto potrebbero essere prodotti come parti piatte, piegati nella forma desiderata e equipaggiati con micro‑batterie e circuiti di controllo. Sciami di questo tipo potrebbero un giorno esplorare edifici danneggiati, ispezionare tubazioni industriali o esplorare altri pianeti — partendo da qualcosa che, a prima vista, sembra solo un foglio tagliato con ingegno.
Citazione: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Parole chiave: robot in scala insetto, robotica origami, attuatori piezoelettrici, locomozione adattiva al terreno</keyword-l> <keyword>fabbricazione di micro‑robot